基于无人机链路控制的抗干扰策略及干扰检测作战技术研究
2020-03-15张哲聪唐碧蔚杨玉龙尚航
张哲聪 唐碧蔚 杨玉龙 尚航
(中国航空无线电电子研究所 上海市 201100)
从广义来说,无人机系统包括无人机平台、空地通信链路[1]和地面系统,其中无人机数据链[2]是无人机系统的重要组成部分,是无人机平台和地面系统联系的纽带。无人机链路按距离分为视距和超视距(卫通),按频率分为低频、中频、高频、甚高频,不同频率的链路按高低又可分为UHF 波段、L 波段、S 波段、C 波段、X波段、Ku 波段、Ka 波段等。
实际任务中,地面系统对无人机的链路控制或多或少受到地理位置、磁场环境、人为操作错误、相互交叉等因素的干扰直接影响着无人机平台的飞行品质。因此,为了最大程度地避免无人机链路控制品质下降,本文从无人机链路控制的角度,对数据链控制的干扰因素、抗干扰策略及检测措施进行研究,提高无人机链路控制的可靠性。
1 频段选择建议
无人机测控通信链路可以使用很多不同的频率。国际上通常要求无人机测控通信链路使用航空保留频谱。然而,问题是当前可用的航空频谱很少,且没有频段是专门为无人机系统分配预留的。虽然军方可以使用其自己的各种保留频率,但是使用过于宽泛的频谱是不明智的。因为过多的应用频率不太可能充分保证无人机系统安全使用;而且过多的应用频率导致数据链路完整性的定量评估困难。为无人机测控通信链路选择合适的频率[3]取决于多种因素。目前我国通信频段的主要分布如表1。
对于视距和超视距而言,在天线设计中,频率低于2GHz 意味着可不考虑定向天线,因为低于这些频率的链路性能不容易受雨水和大气的影响。
根据频谱分布在无人机测控链路设计[4]中应首先根据无人机任务的传输带宽选择相应的适合无人机频率链路,一般来说,传输小数据量低速的系统选择相对较低的频率范围,传输大数据高速的系统则选择相对较高的频率范围,同时要考虑与民用及其它专用频道错开,进行链路频段的筛选,避免频段干扰。
2 链路干扰检测
在无人机链路控制中,链路频段干扰是一个非常重要的问题,一直伴随着无线通信的应用发展而存在,也是许多通信专家学者致力解决的问题。干扰检测的主要目的是为了发现、识别和追踪干扰源,进而达到避免频段干扰的作用。
2.1 检测流程
频段干扰检测是一种通过分析无线通信中的数据发传输率、信噪比、误码率、载波监听时间等通信参数判断当前的数据链通信是否处于干扰的手段。干扰检测技术[5]主要包括CSMA/CA 的无线电干扰检测、RSS 的无线电干扰检测、多指标的无线电干扰检测技术、芯片错误率的无线电干扰检测、机器学习的无线电干扰检测等等。
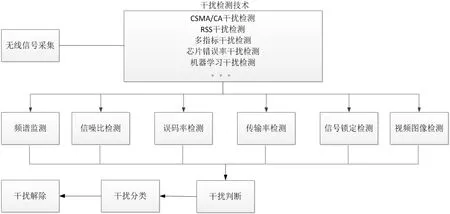
图1:链路干扰检测与解除流程

图2:抗干扰控制方法
频段干扰检测与解除的主要流程包括无线传输信号采集、信号干扰检测、信号干扰判断、干扰分类、干扰解除,详细的检测和解除流程如图1 所示。
2.2 检测途径
本文主要对基于干扰检测技术下的干扰判断手段进行研究,包括如下手段进行干扰检测。
2.2.1 频谱监测
频谱监测是一种在频域上(频率和幅值)对无线通信信号进行分析检测的手段,可对无线通信的频率、功率、谐波、噪声等信息进行监测。频谱一般包括硬件频谱监测和软件频谱数据监测两种方式。链路监控员可在频谱上直观的观察各频段的干扰情况以进行链路切换判断。
2.2.2 信噪比检测
信噪比是通信设备或电子系统中信号与噪声的比例,是通信信号质量好坏的一种指标,一般来说,信噪比越高说明信号质量越好。在无人机链路控制中,通过对信噪比的数值进行监控,如果信噪比突然下降,则判断可能遇到其它信号干扰。

表1:国内无线频谱分配情况

图3:抗干扰工作流程
2.2.3 误码率检测
误码率是衡量数据在规定时间内传输精确性的指标。在无人机链路控制中,当链路处于稳定控制时,一般来说误码率会相对比较恒定。当监测到误码率突然增大时,此时链路可能遇到了遮挡或干扰。
2.2.4 通信数据包传输率检测
数据包传输率是指对一定时间内的信号发送数据包的数量与接收数据包的数量的比例,当链路受到干扰时,信号发送出去的数据包在外部环境中丢失导致接收数据包数减少,在监控席位一般可监控数据包传输成功率降低时,此时链路可能遇到干扰。
2.2.5 信号锁定检测
信号锁定包括无线信号的解调、解扩锁定,是无线信号传输达到稳定阈值的直观显示。一般来说,信号锁定(解调、解扩)时,地面系统可保持与无人机平台的正常通信传输,操作员可通过观察信号是否锁定或者保持锁定来判断此时链路是否处于稳定传输的状态。
2.2.6 传输视频质量检测
当无人机与地面系统存在图像或视频业务传输功能时,可通过图像或视频的连续显示情况来判断无线链路的传输性能,是链路性能判断的直观表现。当操作员观察图像或视频出现断续、卡顿或马赛克时,可判断无线链路此时可能遇到了干扰。
3 链路抗干扰策略
3.1 抗干扰方法
在无人机系统设计中一般数据链厂家对无线电通信设备进行设计,设备厂商会在方案设计时对通信设备的抗干扰性能考虑设计,通过增加包含带频率、安装天线优化角度、提升滤波器精度、隐身方面等手段提高设备抗干扰性能,一般在设备交付后所有参数性能基本确定,设备的链路抗干扰特性也基本不变。
本文从无人机链路控制工程应用角度,在无线电设备稳定工作的情况下,主要考虑在链路控制过程中频段的干扰因素[6]来自能量干扰、信号干扰、信息干扰,其中能量干扰通过干扰站的相同信号的功率进行干扰,信号干扰通过侦察识别特定的无线信号并对其进行干扰,信息干扰则是通过破解无线通信的信息内容,伪造满足通信干扰意图的指令,使无线通信系统失效。一般通过任务前进行频段申报预防、增加站间距离、优先采用定向天线、加大功率、选择抗干扰波形、信息加密等方法进行链路频段抗干扰保护,抗干扰控制方法[7]见图2。
3.1.1 任务频段申报预防
无人机频段干扰一般包括已知频段干扰和未知频段干扰。未知频段干扰是指在无人机执行任务范围过程中有其它未知来源的设备也进行相同或相近频率发射干扰,这种干扰一般较难避免,常用办法通过频段检测错开干扰频段。已知干扰是指无人机任务过程中被已知位置设备已知频率的发射干扰,由于无人机任务一般由军方或者专门的机构进行事前申报,可对空域、任务、频段等信息进行统筹,这样可以在已知可控范围内进行频率分配,做到链路干扰控制最小最优化。
3.1.2 增加站间距离
在地面系统链路控制设计时站点位置布局也是重要考虑因素。由于无线链路设备的有效覆盖范围是一定的,在条件允许的情况下,通过尽可能增加对同一时间不同无人机任务之间的地面系统空间距离的方法,是解决无线干扰的有效途径。
3.1.3 天线优先选择
在无人机系统中一般由多条链路进行通信传输保障无人机信息安全。各链路可能由全向或者定向两种天线进行数据接收。由于全向天线覆盖范围为360°全方位辐射,定向天线覆盖范围为小角度的波束辐射,在空间范围一定的情况下,定向天线相比全向天线受到干扰的概率低,所以在链路使用中优先考虑定向天线可相对避免天线之间的链路干扰。
3.1.4 增大功率
无人机在执行任务过程中,无人机通信频率处于一定范围内,适当调高发射功率可抑制其他频率无线电的干扰,增强无线设备对链路其它干扰波形的过滤,提高无线链路的抗干扰通信能力。
3.1.5 抗干扰波形选择
在无线通信中,通信信号体制一般为常规体制,信号受到干扰可能会引起载波锁相环失锁或错锁、误码率升高、信噪比减小、数据包传输率下降等。无线通信的典型抗干扰波形体制主要包括直接序列扩频、跳频等。扩频是将有用信号的功率谱进行扩展,功率谱属于低截获概率信号,不易被发现跟踪。跳频是其载频有PN 码控制随机跳动使地方难以对其信号进行侦查、截获、干扰。在链路使用中应视情选择适合抗干扰波形。
3.1.6 信息加密
信息加密是一种对无线通信中数据传输内容进行保护的抗干扰措施。信息加密主要是通过加密算法将可被直接破解的明文通信数据格式转成密文数据,同时为防止加密格式被敌方获取,一般在通信数据包加入时间信号,对数据发送接收端进行时间比对校准,时间信号符合的才可进行有效传输或执行相关操作,进一步对通信内容进行安全保护。在链路使用中使用密码传输可提高链路中数据的抗干扰特性。
3.2 抗干扰工作流程
根据上述抗干扰控制方法本文提出了一种面向实际任务过程中链路的抗干扰工作流程,具体流程如图3 所示。
指挥中心、机关或部队下达作战任务,根据任务要求,首先进行链路抗干扰控制分析,依次判断站间距离是否满足抗干扰要求,频道是否提前申报满足抗干扰条件,是否优先选择易抗干扰天线,信息是否加密,是否为抗干扰波形,然后进行链路通信工作参数设置。检测到干扰后进行干扰类型分类,再次判断是否为抗干扰频道,功率抗干扰能力是否满足,天线是否受到干扰执行对应的抗干扰措施,最终完成整个任务阶段的抗干扰控制。
3.3 检测干扰后措施
当操作员在链路操控时发现链路存在干扰或者干扰风险时,可根据干扰类型采用以下三个方式进行干扰预防解除[8]。
3.3.1 切换频段
如果信号较弱,可根据频谱监测确定该频段是否存在干扰,同时在频谱上选择相对信号干净未受干扰的频段,进行频段切换错开干扰。
3.3.2 增加功率
当出现信号轻微下降但还在可接受范围内,可通过增加当期无线频段的功率进行信号增强以保证通信链路受到干扰的影响减弱。
3.3.3 切换天线或各波段数据优先级
如果连续切换频段或者功率均没有明显效果,则可根据情况进行天线选择优先级手动或自动切换,适时进行天线切换或不同波段主备切换,以达到干扰后对无人机链路控制的影响最低。
4 结束语
本文以无人机链路控制工程应用为研究背景,以链路控制中常见干扰为研究对象,针对无人机链路控制中可能遇到的干扰问题进行了全面分析,依次从无人机链路频率选择、干扰检测手段、系统抗干扰方法、抗干扰工作流程及干扰后解决措施等方面进行了研究,该抗干扰策略已应用于某型无人机试飞中,为进一步提高无人机链路控制品质提供了思路和依据,具有一定的工程应用价值。
