矿用钻机监控系统的应用分析
2020-03-14陈斌
陈 斌
(山西古县西山鸿兴煤业有限公司, 山西 临汾 042400)
引言
随着综采技术水平的不断提升,煤矿综采作业的深度不断增加,导致在开采过程中出现瓦斯突出、透水等事故的概率不断上升。作为一种重要的矿用机械设备,钻机被广泛应用在井下的瓦斯抽放、探放水作业等[1],其钻进作业时的速度和精确性直接关系到煤矿井下的综采作业安全。由于井下高尘、低能见度的环境条件,使人工控制钻机进行钻进作业时极易出现误判现象,导致钻机速度和钻进时的位置精度受到影响,同时,井下钻机的钻进作业也属于高危险岗位,对钻机操作人员的人身安全造成了较大的影响。因此提出应用一种新的矿用钻机远程监测控制系统,实现对钻机钻机作业的远程监测和控制,不仅可消除井下危险环境对作业人员的影响,而且能够自动实现定位和钻进作业,有效提升钻进作业时的速度和稳定性,对提升井下综采作业的自动化水平、降低作业人员的劳动强度,实现自动化、无人化综采作业具有较大的意义。
1 钻机监控系统的结构及工作原理
该矿用钻机远程监测控制系统的整体结构包括监控模块、远程控制模块及数据信息模块三个部分构成,其整体结构如图1所示[2]。
由图1可知,该系统在工作时,数据采集系统将采集到的地质条件信号和钻机的工作状态信号传输给下位机平台,下位机平台将监测数据分析处理后传递为地面监测控制中心的数据处理中心,数据处理中心判断后给出控制钻机调节的控制指令,由控制人员审核后发送或者自动进行控制发送,实现远程对钻机的钻进作业控制。
在整个钻机远程自动控制的过程中,系统通过信息采集模块对钻机工作时的电机功率、电流、钻头转速、温度等进行实时监控,由数据库对比各监控信息的实际值和设定值之间的误差并显示在监控中心的监控平台上,上位机系统同步调取数据库内的钻机位置数据对钻机的姿态进行调控,从而实现对钻机钻进作业的远程自动化控制。

图1 矿用钻机远程监控系统结构示意图
2 监控系统的通信单元
由于煤矿井下的地质条件复杂,受干扰因素多,为了确保远程监测控制功能的稳定性,对该监控系统的通信单元提出了更高的稳定性。通过对不同类型数据通信原理和可靠性的分析,最终选择了CAN数据总线通信模式[3],各个监控站点的数据通信端和中央控制通信单元采用双回路连接方式,一方面提高数据传输过程中的稳定性,避免发送和接收的数据之间相互干扰,另一方面增加了数据通信通道的容纳能力,能够在单位时间内进行更大量的数据信息传递,满足钻机监控系统对数据通信稳定、精确、快速的要求。在该通信系统中,为了满足对各监测要素全覆盖的要求,在系统中共设置了12个数据网络监控点,分为8组压力变送器和4组温度、电流、电压、液位等采集器,整个数据通信单元采用三级扁平模块化的网络连接结构,最大限度提升数据传输的速度,该监控系统的数据通信单元整体结构如下页图2所示。
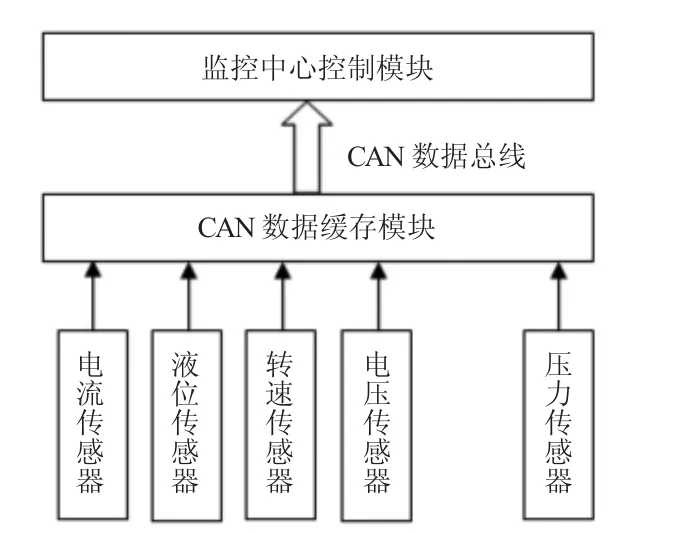
图2 远程监控系统通信模块结构示意图
3 监测系统的钻机调控流程
该监测系统的核心作用是用于控制井下钻机的钻进作业,对钻进过程中的偏差量进行自动修正,从而确保钻进作业的高效和稳定性,因此,根据监控中心对钻机钻进作业的调控流程优化了钻机在钻进作业时的工艺流程[4],满足监控系统不断调整控制的要求,其整体钻机钻进调整工艺流程如图3所示。

图3 远程监测控制下钻机的钻进工艺流程
由图3可知,钻机钻进作业时会通过远程控制系统对钻机钻进的参数进行两次修正,在开始钻进作业初期进行一次数据修正,待一次钻进完成进行提钻后再次对钻机的钻进作业数据进行修正,从而确保在整个钻进作业期间对钻机的钻进精度、效率进行调整控制,从而提升钻机钻进作业时的精度和钻进效率,满足井下综采作业安全需求。
4 结论
1)钻机远程监测控制系统的整体结构包括监控模块、远程控制模块及数据信息模块三个部分构成。数据采集系统将采集到的地质条件信号和钻机的工作状态信号传输给下位机平台,下位机平台将监测数据分析处理后传递为地面监测控制中心的数据处理中心,数据处理中心判断后给出控制钻机调节的控制指令,实现远程控制。
2)整个数据通信单元采用三级扁平模块化的网络连接结构,最大限度提升数据传输的速度,具有传输速度快,抗干扰能力强的优点。
3)钻机钻进作业时会通过远程控制系统对钻机钻进的参数进行两次修正,从而确保在整个钻进作业期间对钻机的钻进精度、效率进行调整控制。
