煤矿提升机电气控制系统的设计
2020-03-14李剑
李 剑
(阳煤寺家庄有限责任公司, 山西 晋中 045300)
引言
提升机运行的可靠性和稳定性在很大程度上由其电控系统所决定[1]。传统提升机采用异步电机转子回路串联电阻的方式进行调速运行,该种调速方式存在可靠性差、提升性能差以及维修成本高等问题,导致在实际生产过程中提升机遇到载荷突变时无法及时对其提升速度进行平稳调节。故设计一套高性能的电气控制系统,为保证综采工作面的产煤效率及安全性提供保障。
1 提升机电气控制系统总体方案的设计
提升机提升性能的关键在于其电气控制系统的性能。经调研,目前应用于电气控制系统的核心处理器为PLC控制器,调速系统为变频调速系统。因此,本文将基于PLC控制器设计一套可变频调速的电气控制系统。该电气控制系统的总体结构如图1所示。
如图1所示,提升机电气控制系统包括主控系统、辅助控制系统以及监控系统。
为进一步提升系统的安全性和可靠性,本系统采用PLC冗余设计,即采用两头PLC控制器。其中,一套PLC控制器主要实现对提升系统的控制,包括提升、闭锁等操作;另一套PLC主要对现场设备的运行情况进行监测[2]。变频调速系统主要根据工况实现对系统速度的平稳调节。制动电源主要为系统的制动提供能量。监控系统主要是对现场所采集到的系统的运行状态进行实时显示。
本文以其主控系统为研究对象,并对其中的PLC控制箱和变频调速控制柜进行重点研究。
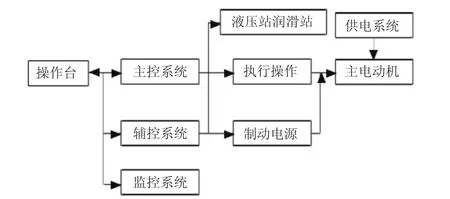
图1 提升机电气控制系统结构框图
2 提升机电气控制系统硬件的设计
电气控制系统的硬件主要包括PLC控制器的选型设计、变频调速系统以及通信系统的硬件设计。
2.1 PLC控制器硬件的设计
2.1.1 PLC控制器的选型设计
针对提升机在实际生产过程中遇到载荷突变时无法及时对其提升速度进行平稳调节工况的需求,并结合以往选用PLC控制器的经验,选择PLC的型号为西门子S7-300系列。S7-300PLC控制器电路的结构框图如图2所示。
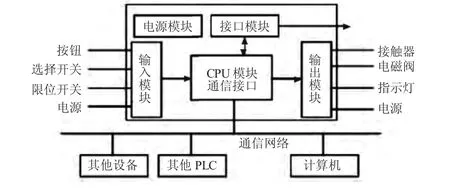
图2 S7-300PLC控制器结构框图
如图2所示,PLC控制器的核心部件为CPU模块、电源模块和通信接口。其中CPU模块主要将现场采集到的数据进行分析处理后输出到对应的控制程序,并对电控系统的相关程度和指令进行存储。通信接口主要用于实现上位机与下位机之间的通信[3]。电源模块主要为控制器提供其运行所需的能量。
2.1.2 PLC控制器的冗余设计
为提高提升机电气控制系统的可靠性和安全性,该电气控制系统采用双冗余设计,即采用两套PLC控制器。其中,一套PLC主要实现对提升系统的控制,包括提升、闭锁等操作;另一套PLC主要对现场设备的运行情况进行监测。基于双冗余设计的PLC的接口数量统计如表1所示。
基于双冗余设计的安全回路有两种。其中一路是基于继电器开关串联组成的硬件安全回路;另外一路为基于PLC的安全回路。
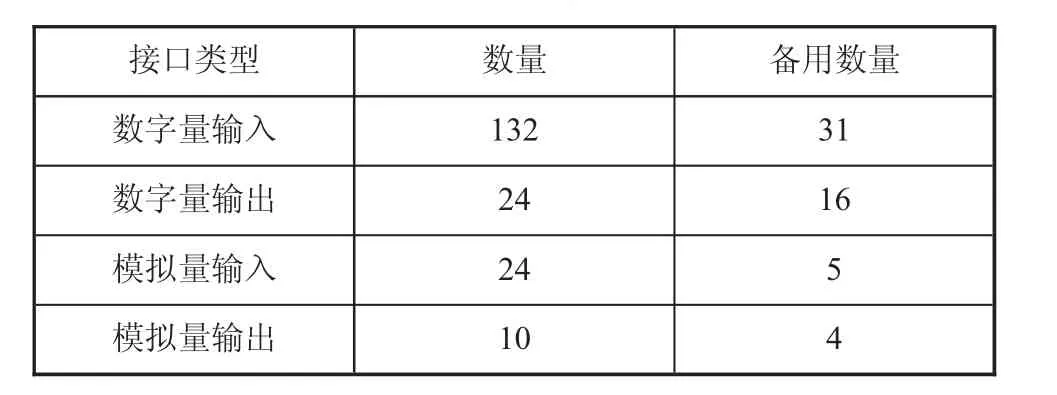
表1 PLC接口数量统计表
2.2 变频调速系统的设计
变频调速系统是确保当提升机遇到突变载荷时能够实现平稳调速,能够根据实际提升任务要求给以匹配的速度提升。结合该工作面日常生产的提升任务,选用交直交的变频调速方案[4]。结合现场提升任务并充分调研市场的基础上,所选变频调速装置的型号为西门子公司的SM1500系列的电压源型交直交变频调速器。
为进一步提升变频调速系统的响应特性和调速精度,为该变频调速器配置二极管钳位三电平、IGBT功率器件以及SVPWM的适量控制方式。
2.3 通信协议的设计
为确保上位机与下位机通信的可靠性和稳定性,本电气控制系统采用多点接口MPI通信协议。基于多点接口MPI通信协议可实现传播速度最大为12 MB/s、最小为19.2 kB/s的传输[5]。
3 提升机电气控制系统软件的设计
根据提升机的实际运行工况,其电气控制系统主要包括有辅机启动、开车准备、安全回路以及机车操作等环节。
3.1 辅机启动
提升机电机在启动之前必须确保系统中的油泵、制动装置等辅机已全部启动。即,辅机启动完成对润滑油泵、液压油泵以及制动装置的启动工作。
3.2 提升机启动条件判断
提升机电机启动前需自检是否满足启动要求。具体判断条件为:油泵、制动装置等辅机是否已全部驱动;联锁控制手柄和联锁手柄是否已全部处于零位等。当提升机自检到满足所有自检条件时,提升机电机可立即启动。
3.3 安全回路
当提升机在运行过程中出现故障时,硬件安全回路会进行立即停车操作;软件安全回路会根据故障类型发出报警。当系统中的故障得到解决后,其相应的报警也会随之解除。
3.4 提升机的控制
为提升提升机对现场工作面的适应性,其提升操作可实现手动和自动控制方式。自动控制是基于PLC控制器实现的,主要对提升机的提升方向进行判断并执行,其对应的程序流程如图3所示。
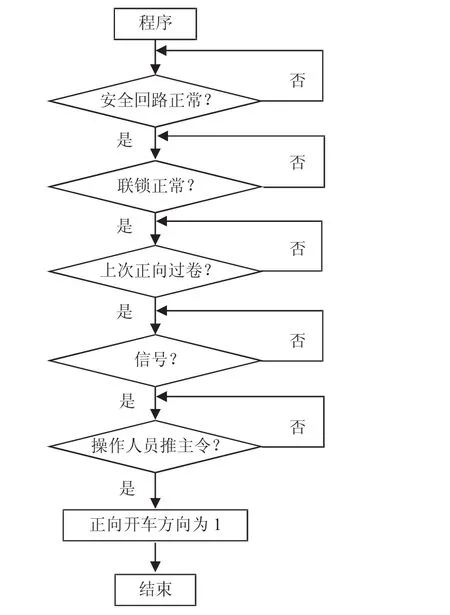
图3 提升机方向判断与执行程序流程图
4 提升机电气控制系统性能的测试
为验证本文所设计提升机电气控制系统的控制性能,基于上述硬件和软件设计内容搭建提升机电气控制系统试验机,并按照实际生产要求完成接线检查、供电等操作,并对其在空载工况下的性能进行验证。验证结果如图4所示。
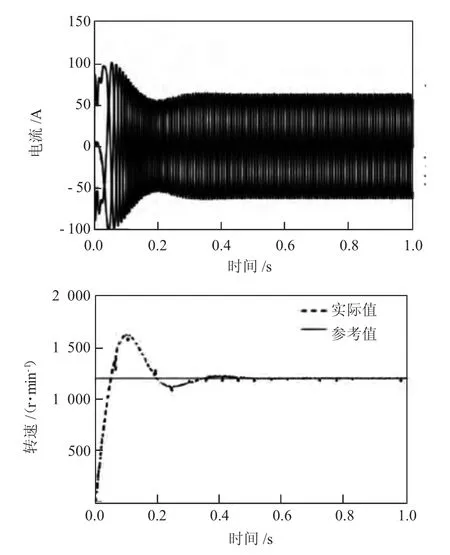
图4 验证结果
分析图5可知,在空载运行工况下提升机在启动阶段电流的冲击较小,避免了由于大电流波动对设备造成的冲击,且系统提升机输出电流在极短的时间内达到平稳状态;在空载运行工况下,提升机转速的超调量较小,且在系统启动后0.4 s左右达到平稳状态。
综上所述,本文所设计的提升机电气控制系统的控制性能能够满足实际生产的需求,在启动阶段不会对设备造成冲击,且能够在极短时间内完成对系统平稳性的调整。
5 结语
提升机作为综采工作面的关键运输设备,其稳定性和可靠性直接决定综采工作面的产煤效率和安全性。为提升提升机电控系统的控制性能,将双PLC冗余设计及变频调速装置引入其电控系统中,在确保提升机可靠、安全生产的同时,为其在载荷突变的情况下提供平稳调速的功能,为实现煤矿提升系统节能、高效生产奠定基础。
