基于SLAM理论的全向移动机器人的设计
2020-03-11高誉熊梦彪高波花江雨匡杜坤
高誉 熊梦彪 高波 花江雨 匡杜坤

摘 要:本设计基于SLAM理论研究室内机器人的全向动图及其动态建图。机器人使用激光雷达检测环境,自主绘制未知环境地图,并在自主导航行驶路线时避开障碍物。同时为了应对复杂环境下机器人移动全向运动的问题,设计麦克纳姆轮模型实现机器人在平面内做出任意方向平移同时自转的动作。并且在自主导航运动时可以在上位机软件控制其远程回传视频图像。现在的餐饮业,快递业甚至是比较大的制造工厂等都已经使用移动机器人协助工作,尤其是其自主导航技术发挥了重要作用。
关键词:SLAM理论;全向运动;上位机;视频图像
1956年,乔治·德沃尔发明创造了世界上第一台电子可编程的机器人,并且于1961年发表了该项专利[1]。在机器人发展萌芽时期,第一家制造工厂Unimation研制出了第一台工业机器人,逐渐进入实用阶段。往后随着各种技术的迭代升级和迅速发展,机器人技术应用于各行各业,范围广泛,服务型机器人日趋成熟。移动机器人的导航技术是对周围的动态环境做一个世界模型,在这个过程中,要对物理世界建模,路径规划,避障移动等。世界模型可以对应地图构建,对所处位置定位后规划出最优的路径,自行绕开障碍物,到达指定目的地。这个技术在当前社会各行业的需求条件下,一直受到广泛关注,也处于研究前沿。
1系统设计
本设计主要是采取麦克纳姆轮作为运动模块,通过建立数学模型可以实现机器人在平面上360度无死角的全向运动。同时采用激光雷达检测环境,机器人自主构建未知环境的地图,自主导航行驶路线时躲避障碍物,顺利通行。最后再将机器人所经过的地方进行一个动态建图,实景图像以及所建的地图都将显示在上位机上。
2 硬件系统设计
2.1 主控选择
树莓派由注册于英国的慈善组织“Raspberry Pi 基金会”开发,Eben?Upton/埃·厄普顿为项目带头人[2]。一个最初用于教育的工具逐渐应用于生活的各方面。一个仅比信用卡稍大的主板就可以聚合所有部件,相当于一个微型计算机,输入输出引脚是它和传统计算机的区别所在,可以连接外部组件和传感器。主板可以连接任意的标准键盘、鼠标和网线。同时电视机通过视频模拟信号的电视输出接口的连接,再连接上键盘,可以执行很多功能,包括高清视频播放等,十分便捷。较新型号的RPI还内置蓝牙和wifi,可以進入无线模式。完全适合用于进行激光雷达地图建模,满足本设计的选用要求。
2.2 机器人移动模块设计
在本设计中为了实现全向移动的功能将采用麦克纳姆轮,麦克纳姆轮是一种可以全方向移动的装置,这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面[3]。当车轮绕着定轮主轴旋转时,每个小滚子的包络面都是一个圆柱面,因此车轮可以连续向前滚动。相对于全向轮,麦克纳姆轮应用逐渐广泛,尤其在各种赛事上的机器人,其酷炫的外形都是导致作为首选原因。
将4个新型轮子组合安装在移动机器人上,全向移动的基本特点就实现了。基于麦克纳姆技术的全向移动指的是前行,横向移动,斜向移动以及各种更有难度的组合动作等。在有限的空间或者狭窄的通道环境下移动和作业需要这种技术的支持。全方位叉车和全方位运输平台的制造解决了舰船条件下的有限空间问题。给舰船业带来的极大的便利不管是在成本还是效益上都有所体现。麦克纳姆轮的实物图如下所示:
3 软件系统整体设计
3.1激光雷达测距
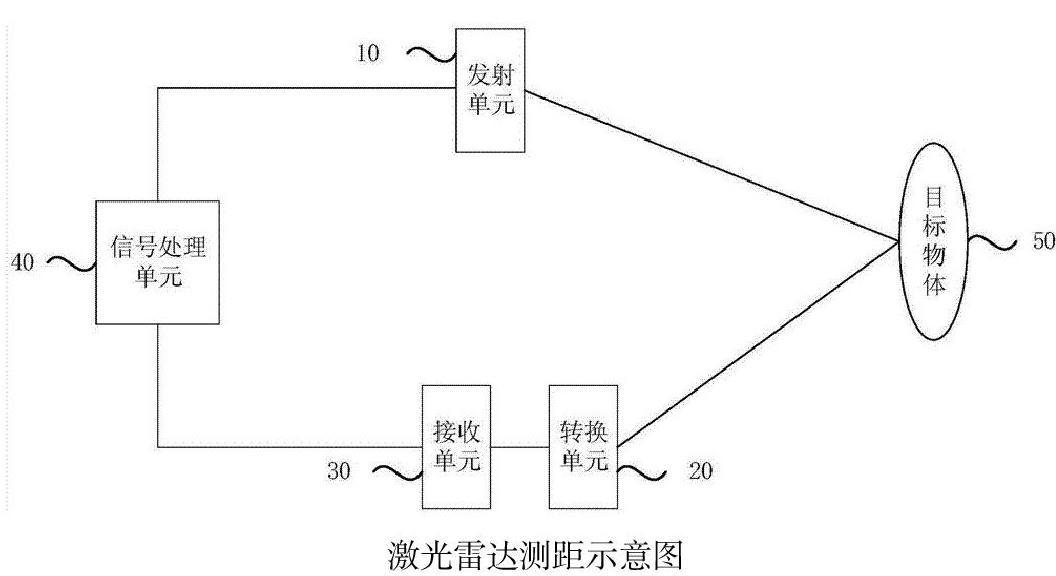
激光雷达原理与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,Time of Flight)[4]。激光发射器发射激光后,经物体反射后被接收。使用光速测距,计时器计时。距离就是通过激光信号的时间差和相位差决定,角度通过水平旋转扫描,建立二维极坐标系,这两个参数再加上俯仰角度可以构建三维的有效信息。高频激光在一秒内可获取大量的位置点信息,也就是点云,根据这些信息绘制三维环境地图。激光雷达常应用于自动驾驶汽车等领域。而事实上,激光雷达作为“机械之眼”,也大量应用在无人机、机器人等等方向上。激光雷达测距示意图如下图所示:
激光雷达还具备独特的优点,如极高的距离分辨率和角分辨率、速度分辨率高、测速范围广、能获得目标的多种图像、抗干扰能力强、比微波雷达的体积和重量小等[5]。不仅可以精确测量目标距离和角度,还可以准确掌握运动状态,在探测识别目标的同时能够跟踪目标。
3.2路径规划技术
路径规划是计算出满足机器人运动学约束的最佳无碰撞轨迹。然而,周围环境的地图可能存在不准确或不完整的问题。如果机器人盲目地沿着这样一条路径移动,仍然会有无法及时躲避障碍物的问题。路径规划分为两种,全局路径规划是在地图绘制的基础上,根据地图来选择到达目的地的最佳路径。而局部规划是基于传感器数据信息,主要进行精准的避障和当前路段的规划,控制机器人沿着基于地图的全局路径行驶。
移动机器人路径规划技术概括为以下4类:模版匹配路径规划技术、人工势场路径规划技术、地图构建路径规划技术和人工智能路径规划技术。
4结语
此次设计的机器人系统由树莓派作为主控,和一些外部电路构成。本设计是一个硬件实物模型,重点研究和分析了以下问题:机器人可实现在未知环境下自主建立二维地图模型,并实现自主导航、自主避障、实时视频图像传输等功能;通过上位机软件可远程实时地显示机器人运行状态,包括各部件温度、电量等信息。
参考文献:
[1]李想. 基于SLAM的室内移动机器人导航技术研究[D].
[2] 何江. 基于树莓派的智能云灌溉系统研究[D].
[3] 叶杨笙. 通用移动机器人调度系统研究与设计[D].
[4] 杨慧林. 基于四线激光雷达的目标检测与跟踪算法研究[D]. 2019.
[5] 贺应红. Mie散射激光雷达实验系统设计与大气消光系数反演方法研究[D]. 四川大学, 2004.
项目编号:202010742061
由西北民族大学国家级大学生创新创业项目资助
(西北民族大学 甘肃 兰州 730124)
