基于多足吸附式机器人的应用前景分析
2020-03-11马娜娜陈鑫熊君尹张靖廉
马娜娜 陈鑫 熊君尹 张靖廉

摘 要:本文的“多足吸附式机器人”增设了多种传感器模块、红外测距、AI全景摄像头等功能,提高了机器人在复杂地形上的工作效率,有助于AI技术应用和大数据分析的发展。本文从发展现状、结构功能应用两方面展开论述,并对“多足吸附式机器人”的应用前景做出了分析。
关键词:救援;勘探;多足機器人
1.引言
“多足吸附式机器人”在传统搜救机器人的结构基础上,将履带式和轮式改用多足式设计,提高了在复杂地形的工作效率;在技术设计上,增加了AI全景摄像头远程图像传输和视觉网络系统导航功能,提高了“多足吸附式机器人”的信息采集和路径规划能力。目前,“多足吸附式机器人”在灾区救援和资源勘探应用广泛,有着极大的发展前景。
2.在救援、勘测方面的发展现状分析
2.1灾区和矿难救援发展现状
我国是世界上自然灾害种类最多的国家,其中地震是一种破坏力极大的自然灾害,会引起泥石流、山体滑坡、水灾等一系列次生灾害,严重威胁着人们的生命和财产安全。
传统救援方式中,在地面交通完全瘫痪物资运输车又不能正常行进的情况下,只能依靠救援队伍徒步背着物资赶往灾区,费时又费力,救援过程中凭人力也不容易发现废墟下的伤者,有时为了防止灾后瘟疫,救援人员通常需要手动喷雾进行消毒,很容易将自己感染。而“多足吸附式机器人”能替代救援人员进入危险区域,通过多传感器的信息交融分析环境危险性以及确定受难人员位置,并自动生成位置信息传输给救援人员,方便救援人员进行救援。
2.2无人区和地质矿产资源勘探的发展现状
目前,我国还没有完全了解地质资源的状况,缺乏对地质资源的种类、地质条件等方面的了解,缺乏相关的勘探开发数据。以我国对页岩气资源的勘探开发为例,我国对页岩的含气量、含气性还不够了解,并且资源勘探开发的关键性技术还不够先进,在技术方面还有待提高。对于存在的问题,目前主流的方式有物探、钻探、刻槽等技术手段[1],更加先进的技术有轮式勘探机器人和履带式勘探机器人。本团队设计的“多足吸附式机器人”能为人类提供地理和资源信息,方便人类进一步勘探。
3.结构优势
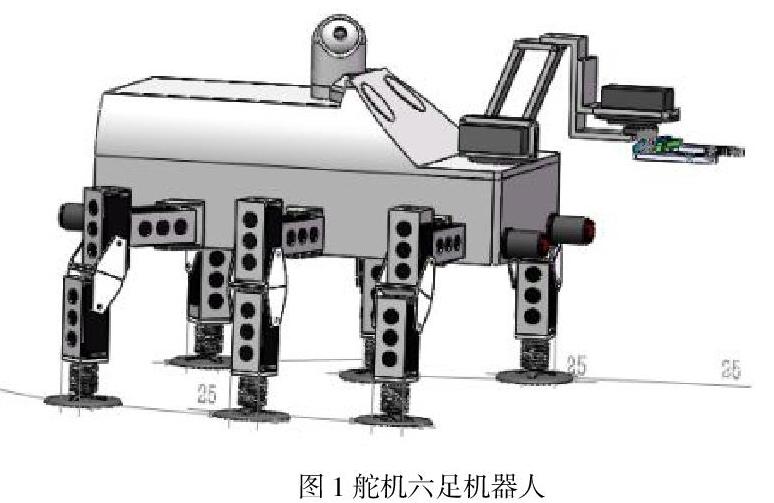
3.1多足吸附式机器人的整体结构
如图1所示,在机器人的本体机构设计上,本团队采用舵机控制板直接控制18个舵机,“多足吸附式机器人”的每条腿上有三个舵机,这种结构的优点是可以实现更加自由的移动,有较强的地形适应能力和运动稳定性。
3.2爬壁功能
“多足吸附式机器人”结构小巧,能够灵活的在地形复杂和空间狭小的灾区行走。如图2所示,在足上我们采用“爬壁”的方式,能自主识别壁面材质,进行吸附方式的自主切换,帮助人们全方位的探测,采用了磁吸附和负压吸附相结合的复合吸附方式进行设计[2],完成复杂壁面作业,在运动过程中,“多足吸附式机器人”通过腿部的弹簧减震,在路面不平整时能及时调整位姿,越过路面障碍。
3.3多种传感器
矿下的环境复杂,里面可能含有很多有害气体,为了保障救援人员以及被困人员的生命安全,我们在“多足吸附式机器人”正前方安装了检测有害气体的化学传感器[3],通过超声波传感器测距,实现自动避障[4]。红外检测技术具有无接触,检测结果可视化、测温范围广、检测速度快等诸多应用优势[5]。它能代替人们进入危险区,进行有害气体的检测以及地形分析,感测周围环境,获得当前位置信息与周边环境信息,并能第一时间将井下信息传递给工作人员。将此技术应用在“多足吸附式机器人”中巡查矿井机器的安全性,大大节省了人们的时间。
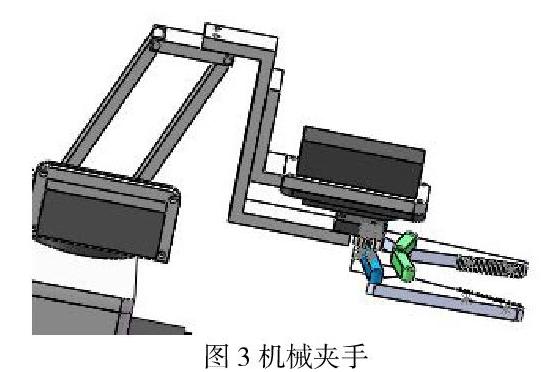
3.4机械夹手和全景摄像头
在勘探资源的过程中,如图3所示,我们运用了一个小型的机械夹手装置在机器人的前端,在需要取样时,它可以夹取样品,极大的方便了人们的工作。
如图4所示,利用全景摄像头对周围环境进行实时拍摄,完成取景、成景动作,将照片或视频信息远程传输至电脑(手机),实现远程监控。基于视觉网络系统的导航功能通过采集导航区域的实时图像信息,并将其传输至智能处理系统,生成动态地图,从而规划机器人“可通行路径”,实现视觉导航。
4.前景分析
4.1多足吸附式机器人在救援方面的应用前景分析
4.1.1灾区救援
救援机器人可以替代或辅助人工在灾害现场实施救援,尤其是在人、犬或其他探测设备无法到达的狭小空间 (例如直径小于1米的孔洞),或可能对救援人员带来伤害的危险环境 (如危化品环境、核辐射环境等) 发挥重要作用。例如地震搜救机器人在国内主要应用在参与芦山7.0级地震救援行动。在现场勘查、人员探测等方面发挥了重大作用。灾后废墟环境有很多特别狭小的孔洞,普通履带式废墟搜救机器人难以进入,足式机器人是模仿人或四足、多足动物行为模式而研发的仿生机器人, 具有较强的越障能力。为了克服墙壁、台阶等环境给救援带来的困难,我们的“多足吸附式机器人”能够通过高密度的聚合物或特殊机构吸附在墙壁上爬行,完成相应的救援工作。
4.1.2矿难救援
煤矿下环境复杂,若事故发生后,需第一时间开展救援工作,传统的救援方案会第一时间安排救援人员入矿开展救援,在矿下环境未知的情况下,可能会受到可能会面临冒落、高温、粉尘、瓦斯爆炸、有害气体积聚等威胁,对救援人员及受难人员的生命安全造成威胁[6]。我们利用“多足吸附式机器人”对事故矿井环境勘测,通过WiFi无线网络与地面人员进行通信,利用现场控制器高效处理传感器感知信号,了解矿井下复杂情况,精确定位受困矿工位置,灵活完成避障动作,监测井下烟雾、瓦斯、CO和O2等浓度,与地面救援中心现场通信,制定救援方案,远程指导救援工作。
4.2多足吸附式机器人在勘探方面的应用前景分析
4.2.1无人区勘探
火山喷发是地球自形成以来就一直存在的一种自然现象,它将地球内部物质带至地表, 为地球上生命的起源和演化提供了物质基础, 还为现代工业的发展提供了许多重要的矿产资源。[7]利用灵活的行走方式和先进的技术特点代替勘探人员前往火山附近采集火山喷发物及附近矿石样本,促进火山资料库的进一步完善及协助科研人员进行样品鉴定分析等工作。
考古是寻找和获取古代人类社会的实物遗存,以及如何依据这些遗存来研究人类历史的科研工作。我们由古代遗迹、遗物同周围土壤的电阻率不同,并存在着磁性差异,可用“多足吸附式机器人”红外探测、雷达监测、气体检测等技术代替科研工作者完成提前考察地形、收集样品等工作。
4.2.2地质矿产资源勘探
矿产作为重要的基础能源,是我国社会生产建设的基础。科学技术发展日新月异,矿产资源快速消耗,在人类的过度开发下,目前分布在地表的矿产已经极少[8]。在含矿的地区地形结构复杂,地貌差异大,人员勘察费时费力,我们需利用机器人对矿资源进行地形勘察,对矿产分布情况进行确认,方便采矿人员进一步开展采矿工作,实现矿产开采工作的高效有序。
在危险的矿井地段,“多足吸附式机器人”利用自身行走优势,提前入矿进行有毒气体检测、样品采集、安全巡检等工作,并通过无线通信系统将信息传递给人们,方便开展下一步勘察工作。
5、结论
本文简述了“多足吸附式机器人”的多功能性和在各个领域的应用前景。在未来的发展中,将充分利用“多足吸附式机器人”的优点,从而在人类的生产生活中发挥重要的作用。
参考文献
[1]柴森.探究我国当前地质矿产勘查及找矿技术[J].中外企业家,2020(20):144.
[2]李梦,李明,张田,李玉廷.复合吸附方式爬壁机器人的研制[J].科技视界,2020(04):190-192.
[3]杨扬,陈亮.有毒气体检测报警系统的研究[J].科技风,2019(25):86.
[4]包震洲,俞鸿飞,金文德,李伟达.未知环境下机器人导航算法与避障算法研究[J].机械设计与制造,2020(05):257-260+264.
[5]吕志华.红外技术在机械零件内部检测中的应用[J].南方农机,2020,51(14):132-133.
[6]杜川.地质矿产资源勘查及合理开发利用[J].当代化工研究,2020(15):169-170
[7]许建东.中国活动火山监测与研究历史回顾[J].城市与减灾,2018(05):54-59.
[8]葛世荣,朱华.危险环境下救援机器人技术发展现状与趋势[J].煤炭科学技术,2017,45(05):1-8+21.
[作者简介] 1. 马娜娜(2000-),湖北天门人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
2.熊君尹(1999-),湖北黄冈人,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
3. 张靖廉(1998-),山西临汾人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育。
[通讯作者] 陳鑫(1988-),男,湖北武汉人,硕士,武汉商学院教师,工程师;主要研究方向:工业机器人系统仿真,视觉识别。
[基金项目] 武汉商学院2020年大学生创新创业训练计划,项目号202011654068 , 名称:六足两栖爬虫机器人
(武汉商学院 湖北 武汉 430074)
