一种全自动智能消毒机器人的研究设计
2020-03-11董德武魏欣
董德武 魏欣

摘 要:在当前疫情下,为尽量减少人员感染传播风险,且病毒和细菌都在无时不刻的进行繁殖,人们无法做到长时间进行工作,利用这一点,消毒机器人可以被创作且推广,消毒机器人的工作效率比人们的工作效率高得多,其可以帮助人类进行远程半自动化消毒,大大提高了安全性,并且具有降噪功能,不论是日常生活还是许许多多的对人类健康有威胁的消杀工作都有很大的潜力。
关键词:智能连接; 超长续航 ;消音降噪
1 引言
今年突发的新冠疫情传播传染性极大,短时间内数以千万的人感染病毒,疫情出现急,需要在短时间内提供实验结果;责任重,事关人们的生命和社会的安全,必须有效预防、及时控制和消除 突发公共卫生事件的危害,保障公众身体健康与生命安全,维护正常的社会秩序;难度大。研发消毒机器人在高风险的地方进行作业,通过机器人内部的雾化装置使消毒液雾化,通过机器人的气动装置让雾化的消毒液快速的在室内扩散,增加扩散的广泛性和均匀性,能有效、无死角地杀灭空 间中的病原微生物,可以大幅度的减少感染的风险。
2设计概述
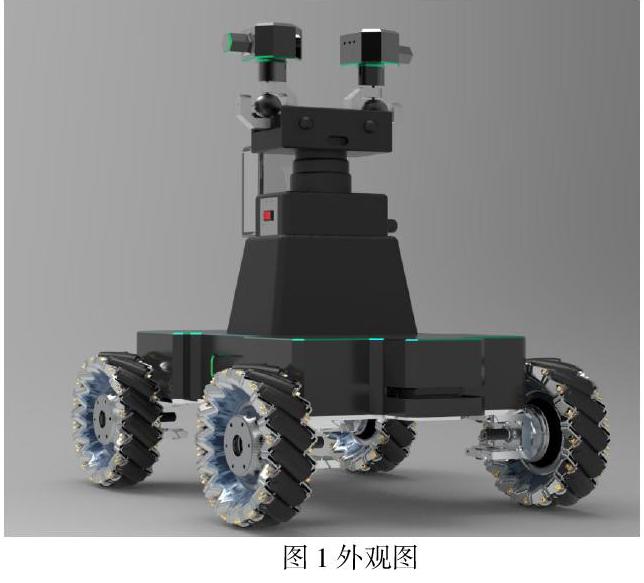
2.1总体结构
消毒机器人包括药品监测,人体监测,判断消毒成果等感知模块。为了克服在作业通道狭窄等环境内运转空间有限的问题以及进一步提高消毒机器人运行过程中的平穩性,我们采用麦克纳姆轮,采用全向驱动技术,加之麦克纳姆轮的独特运行方式,全向智能移动平台能够在任意方向上实现平移和原地旋转。借助这一强大的机动性,机器人可以在狭小的空间内对车辆进行快速定位。机器人具体的行走方式为直行、斜行、横行、S形行进、零半径任意角度旋转等。机器人头部配合机身运动也可实现全方位无死角喷洒消毒药品,提高消毒效率。
智能感知模块。为了减轻人工的负担、保证操作人员的安全,我们为此机器人嵌入了计算机技术、自动化技术和人工智能技术,配备了智能模块,其中包括自感知模块、视觉雷达、机器学习算法等,以实现机器人的自动化,机器人通过雷达导航定位,自主移动到目的地。机器人还可以通过视觉和自感知模块对消毒场所进行自动场景识别,根据场景的不同(医院、学校、酒店、道路等不同场所)选择不同的消毒水平与消毒方式。
续航与降噪处理
智能消毒机器人的大功率、高负载满足了绝大多数场景的需求,超长续航、快速充电,小巧便捷,额定负载下续航24小时充电只需1小时,它的科技化、智能化也可实现自主规划路径、多点位、跨楼层巡游消杀、自主避障、自主回充。为了减少对人类正常生活的影响,还采用精心降噪设计,通过全新电机、优化齿轮设计、优化电机振动、自主降噪装备等降噪优化,让消毒机器人机器人在在保证正常工作同时,声音功率大大降低 。
2.2运动机构设计
在消毒机器人本体结构上通过麦克纳姆轮采用全向驱动技术,实现消毒机器人能够在任何平台和任意方向上实现平移和原地旋转,这种结构的优点可以全方面移动,外形酷炫,可以使在原地旋转时大幅度的减少摩擦力;缺点就可能会发生侧滑,制作起来复杂价格贵。消毒机器人通过在底盘加装红外传感器、超声波传感器等。通过传感器收集消毒机器人的位置信息,将其传输给信息处理器处理后,改变消毒机器人的运动状态,达到自动控制通过路段的目的。利用智能摄像头的图像识别以及测距原理,对消毒机器人进行追踪控制。
3 工作原理
麦克纳姆轮的全向独立四驱移动机器人结构, 它克服了一般轮式机器人转向空间大和转向精确度不高的缺点, 转向较灵活, 可在运动过程中任意时刻任意位置任意改变机器人的位姿, 其运动控制相对简单, 特别适合在
消毒方式:高纯 CLO2气体。消毒机器人就是运用高纯ClO气体发生器,在ClO 气体输出的前提下,利用气动装置,将干燥ClO气体扩散到室内空间,增加扩散的广泛性和均匀性,能有效、无死角地杀灭空 间中的病原微生物,可以大幅度的减少感染的风险。
杀菌原理:二氧化氯气体(CLO)是一种黄绿色的气体,具有强氧化性,可以杀灭各种微生物,其在空气消毒方面具有扩散速度快、消毒后无残留、消毒效果可靠等优点。
智能消毒机器人开机,接收到工作指令后,底盘电机开始启动,操作人员在平板控制终端上建立消毒任务,选择消毒目的地,消毒时间。然后机器人通过激光雷达导航定位,按照程序路线自主移动到目的地,过程中可自动规避障碍,到达目的地后,通过视觉和自感知模块对消毒场所进行自动场景识别,根据场景的不同,选择适当的消毒方式与消毒水平,消毒剂从体内注入喷洒口,开始全方位无死角喷洒消毒药物,消毒完成后,消毒机器人将自动对消毒作业进行检测评估,进行消毒完善,将数据传送到终端保存,关闭喷洒口,完成消毒任务,消毒机器人按照程序路线返回,到达指定地点,自动关机回充,以便下次使用。
4 应用领域
主要应用如下:
(1)可在家中工作,因为我们这一款机器人特设降噪功能,在家中也不会打扰到人们正常的工作休息。
(2)复杂工作场合,因为这款机器人具有智能识别障碍物、智能规划路线、语音提示等功能,在复杂场合下也能来去自如。
(3)危险工作场合,在可能存在病毒的地方,人们进入消毒都会有风险,或者其他高温、高压等危险区域,这款机器人都能完全胜任。
(4)特殊工作场合,如潮湿,大风,沙尘等特殊地区,这款机器人都具备了防水防风防尘的功能。
5 总结
机器人的自主运算和运动,可以实现半自动无人化作业。在减轻人力和提高工作效率同时,使安全系数得到了大大的加强。本产品可以对于楼道等狭小的地方进行针对性消毒,有自主识别,远程半自动化操作功能,能够很好的避免非必要人员与疫情区域的接触。使人员的安全得到了保障,同时机器人的工作效率要远远高于人工水平,能够超出预料的完成作业任务,使资源得到更有效的利用。生活的快节奏,也使不少人忽视了消毒的重要性,不仅在疫情期间,还是在以后的各种各样的消毒场所,这款消毒机器人的智能连接,不仅使我们将我们的时间更大有效的利用到更需要的地方,还能够实时监测到消杀实况,机器人还能自主规避,自主回充,从而有效的进行工作,降噪功能还会减少机器人工作时对人类正常生活的影响,为我们美好的生活增添一份力.
参考文献:
[1]张力,基于ARM嵌入式技术智能巡逻机器人研究科技创新与应用, 2013 ,第1期
[2]闫博扬,李玉衡,姚磊.基于Arduino开发板的自动循迹避障智能车控制系统设计[J].软件,2020,41(07):57-60.
[3]基于麦克纳姆轮的自主绘图机器人的运动控制与绘图设计分析 金炫旭;章胜桃;陈锦,姚志广;刘晓玲;官源林山东工业技术, 2019 ,第22期
[4]赵景平,肖红. 消毒机器人在应对突发不明原因疫情中的应用[C]. 中国技术市场协会、中国高科技产业化研究会、中国生产力促进中心协会、中国科技体制改革研究会、发现杂志社.第十六届中国科学家论坛优秀论文集.中国技术市场协会、中国高科技产业化研究会、中国生产力促进中心协会、中国科技体制改革研究会、发现杂志社:全国科技振兴城市经济研究会,2019:44.
[5]达闼科技云端智能机器人助力医院高效抗疫[J].通信世界,2020(05):28-29.
作者简介:
1.董德武,男,武汉商学院机器人工程专业学生,湖北黄冈人,在读本科,主要兴趣和研究方向有机器人控制,智能机器人编程;
2.魏欣,女,武汉商学院机器人工程专业学生,湖北十堰人,在读本科,主要兴趣和研究方向有机器人自动化,智能机器人编程。
[基金项目] 武汉商学院2020年大学生创新创业训练计划,项目号202011654020, 名称:智能扫地机器人。
(武汉商学院机电工程学院 430056)
