光照度探测器设计与精度校正
2020-03-10郑丹阳冯云鹏王钟瑛程灏波
郑丹阳,冯云鹏*,王钟瑛,李 慧,程灏波
(1. 北京理工大学 深圳研究院,广东 深圳 518507;2. 北京理工大学 光电学院,北京 100081)
随着我国经济的快速发展,航空产业也日渐繁荣。在机场的众多安全保障设施中,助航灯光系统占据着十分重要的地位,为飞行员提供了重要的灯光导引。但针对助航灯光的检测方法与需求仍相差甚远。常用的人工巡检与非接触式的回路检测法不能完全满足使用需求。作者所在课题组设计了用于灯光在位检测的阵列式动态巡检系统。为解决实际检测过程高速测量需求,本文设计了用于高速动态检测的照度探测器,并对其测量精度进行了线性校正;通过比较动态测量和静态测量结果,证明了动态光照度检测系统满足ICAO的误差要求。
1 照度探测器硬件设计
照度平方反比定律[1]见式(1):
(1)
由式(1)可知,当发光体的发光半径与光源到被照明表面之间的距离相比可以忽略不计时,被辐射物体表面的光照度E与发光体在该方向上的发光强度I成正比,和被辐射表面相对该方向夹角θ的余弦成正比,和光源与被辐射表面之间的距离R成反比。
光强余弦定律,即朗伯定律为:
I=I0cosθ
(2)
由式(2)可知,点光源在任意方向上的发光强度与其在垂直方向上的发光强度及角度相关。由此,对机场助航灯光光照度的探测便可以转化为对其发光强度的探测。
照度探测器的工作过程为:硅光电池将输入的光照度转变为光生电流,但是由于光电探测器表面反射及其他元件的遮挡作用,会有部分光线被反射或遮挡,因此需要采用余弦校正器进行修正,使入射光变为漫反射光照射在硅光电池的感光面[2,3]。同时,由于助航灯光是由人眼接收的,需要符合人眼的视见函数,所以还需要加入三片视觉滤光片将硅光电池的光谱响应度转换为符合人眼视觉的光谱响应度。最后,将硅光电池的输出端接入IV转换模块的输入端,将光生电流转换为相应的电压值,方便采集和处理。
照度探测器通常由余弦校正器、视觉滤光片、光电探测器和光电检测电路模块组成。本文设计的探测器效果图和实体图如图1所示。

图1 照度探测器
光电探测器在光照下引起元件材料的电导率变化,进而将光能量转换电信号[4,5]。根据高速灯光巡检测的要求,光电探测器需要完成每秒数百次的测量,且光谱响应范围需要覆盖整个可见光波段,并满足响应时间短、暗电流较小、光电转换效率高、性能稳定等要求。硅光电池由于其不需外加电源即可完成光电转换,接收的光照度及其输出的光电流呈线性关系,响应时间短,可以适应动态检测时的快速测量,同时稳定性高,转换效率高。因此,本文选择LXD23CE硅光电池作为动态光电检测的探测元件[6]。此硅光电池具有响应速度快、体积小、灵敏度高、光谱特性好等优点。
由于光电探测器的光谱响应与人眼的光谱响应不一致,且最终灯光系统的应用对象为人眼,因此,需要对检测系统的响应曲线进行校正,使之与CIE标准的人眼的视见函数吻合。根据卢瑟条件,本文通过在光电探测器前增加三片视觉滤光片,使滤光片的光谱透过率和传感器的相对光谱灵敏度相匹配,来模拟人眼的光谱光视效率,最终使检测用探测器的响应曲线与CIE标准的人眼视见函数相符[7]。图2所示为使用滤光片和硅光电池匹配后光谱响应,其中QB21、LB9、LB16滤光片厚度分别为1.3、1.2和2.7 mm,最终可得到匹配误差约为5.64%,随机误差分析得到匹配误差的范围是f1=5.52%~6.18%。
当光线斜入射到光电探测器感光面时,其产生的光生电流符合余弦定律。此时的光生电流等于光线垂直照射时产生的光生电流和入射角的余弦的乘积。但是入射光辐射会在光电探测器上产生反射损失,且周围的结构也会对光线产生遮挡,使入射光能量会有一部分的损失,光电探测器接收的能量也就偏小,因此,输出的光生电流也偏小。余弦校正器用于修正这一误差,其通常由漫透射材料制作而成,多为聚四氟乙烯,入射光通过其透射,不论入射光以怎样的角度入射在余弦校正器上,光电探测器接收到的都是漫反射光。综合各形状余弦校正器性能和实验所需条件,本文选用球壳状余弦校正器[8]。
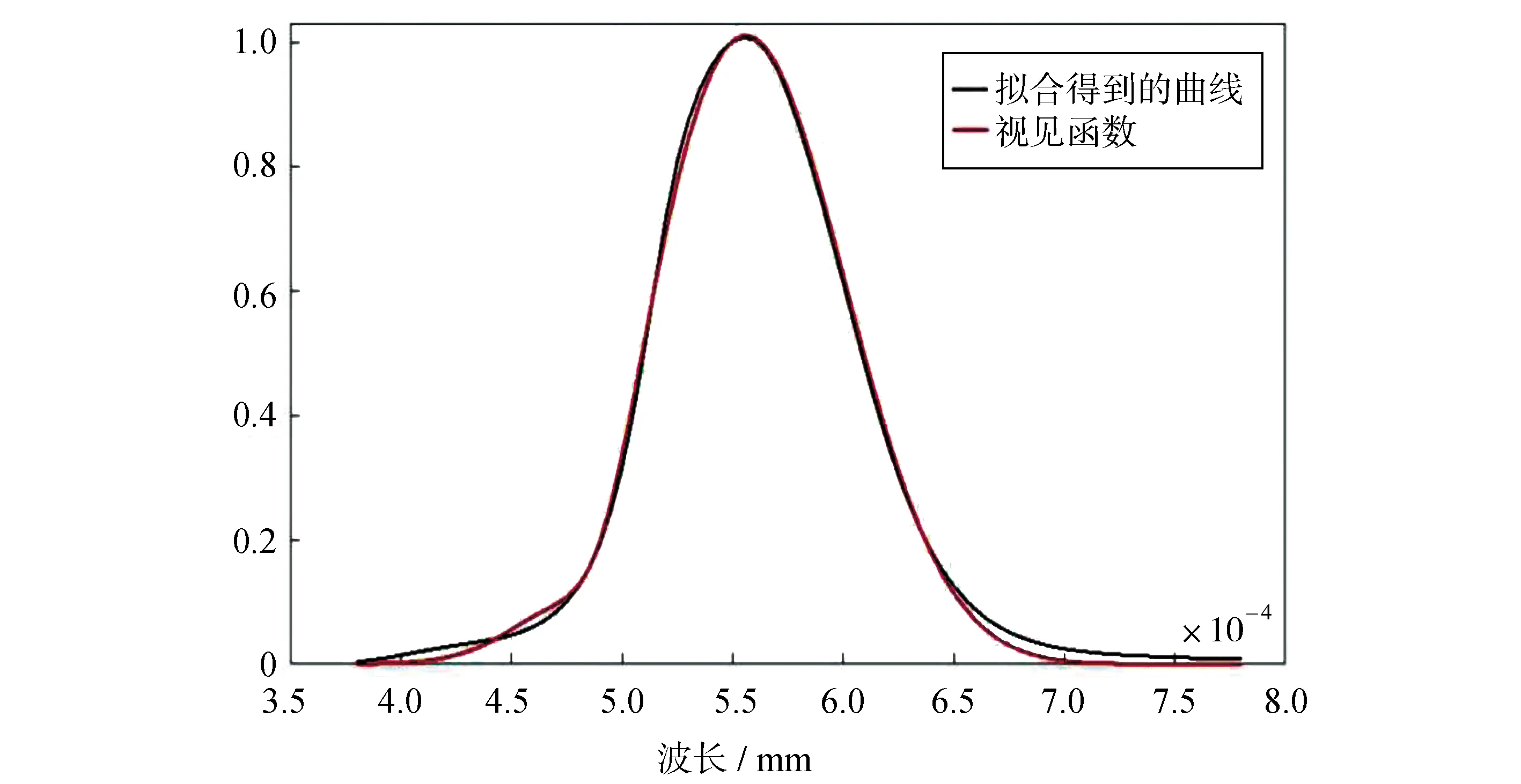
图2 使用滤光片和硅光电池匹配后光谱响应
2 照度探测器标定实验
理论上,照度探测器接收的光照度应与数据采集模块显示的电压值存在线性关系,为了准确的标定出它们之间的关系,提高探测器的精度,本文对系统进行标定实验并确定测量精度。
如图3所示,实验采用一根测光导轨,平直性良好,测距米尺最小刻度1 mm。光轨调平后,水平误差应不超过±1 mm,1 m内测距误差不超过±0.2 mm[9]。测量装置各部件外表面发黑处理。将标准光源固定于导轨尽头,照度探测器固定于导轨上,便于距离的调整,同时为了减小杂散光的影响,在两者中间安装光阑。调整照度探测器高度,使其接收面中心与标准光源的灯丝平齐,并均垂直于光轨的所在水平面,且左右位置的中心点位于垂直光轨所在平面内。同时,为了使标准光源可以等效为点光源,所以照度探测器距离标准光源的最小距离应该大于灯丝直径的15倍以上。
实验环境在暗室中,光轨周围用黑绒布作围帐,避免周围的杂光进入测光系统,实验人员身着深色服装。点亮标准光源20 min后,移动导轨上的照度探测器,分别在等间隔距离下测得输出电压值,进行存储。然后将照度探测器换成标准照度计,这里使用的是远方科技有限公司研发的一级照度计Z-10,再在同样的位置测量一遍照度值。将得到的数据导入matlab计算软件中,通过curve fitting程序进行曲线拟合,得到接收照度值和输出电压值之间的关系,其中拟合方式采用了多项式(polynomial)的线性拟合,拟合结果如图4所示。
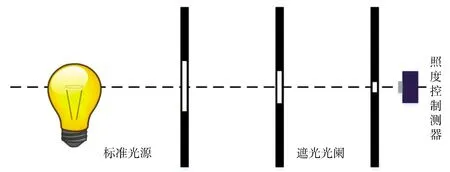
图3 标定实验示意图

图4 输出电压值与输入照度值关系曲线(a)及其残差图(b)
分析线性拟合图形和相应的残差图,可以看出照度探测器输出的电压值和接收的照度值之间的关系曲线整体拟合情况良好,说明输入光照度与输出电压之间存在较好的线性关系,表达式见式(3),式中p1=2604,p2=4664。
f(x)=p1*x+p2
(3)
3 照度探测器测量精度实验
光强等于照度乘以距离的平方,因此,要得到准确的光强值,就需要得到精确的照度值。为了验证照度探测器的测量精度,本文设计实验确定照度的测量精度。实验采用纵向间距15 m跑道中线灯,在不同距离下逐点静态测量照度。分别采用远方照度计和照度探测器在同一位置下进行测量,照度探测器的输出电压值根据公式(3)转换为相应的照度值。表1为标准照度计示值与照度探测器输出电压值经过处理后的数据对比,其中的误差率计算见式(4)。根据表1数据可知,误差率范围在-2.25%~3.25%之间,低于ICAO标准中规定的±5%,满足要求。

(4)
4 照度探测器动态测量精度实验
由于采用的硅光电池有1 μs的响应时间,而照度探测器是动态工作的,所以需要验证照度测量的动态响应性能。依旧采用标定实验时的导轨,固定标准光源位置和照度探测器的位置,并保证照度探测器的接收面中心和灯丝位置平齐。实验条件与标定实验相同,点亮标准光源预热20 min。实验中保持标准光源位置不变,距离光源1.5~2 m范围设置为测量距离,在1.5 m处用照度探测器进行照度测量,从读取的数值中选择最大值进行记录存储。然后多次在2 m到1.5 m距离内将照度探测器进行滑动,分别记录下每次测得的最大数值,两者的差值即为动态测量所带来的误差值,如表2所示。根据表2数据可知,动态测量而引入的照度值误差范围为-0.40%~-2.17%,低于ICAO标准所规定的要求,说明照度探测器测量电路的动态响应性能可以满足动态照度检测的实验要求。
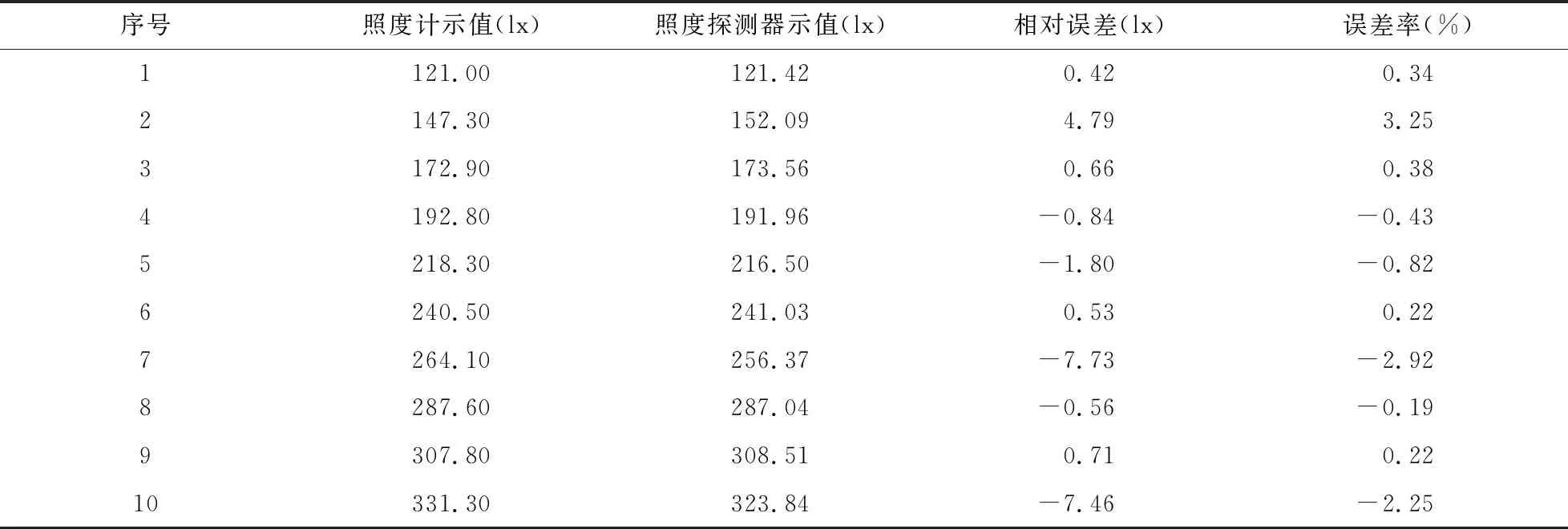
表1 照度测量精确度实验数据
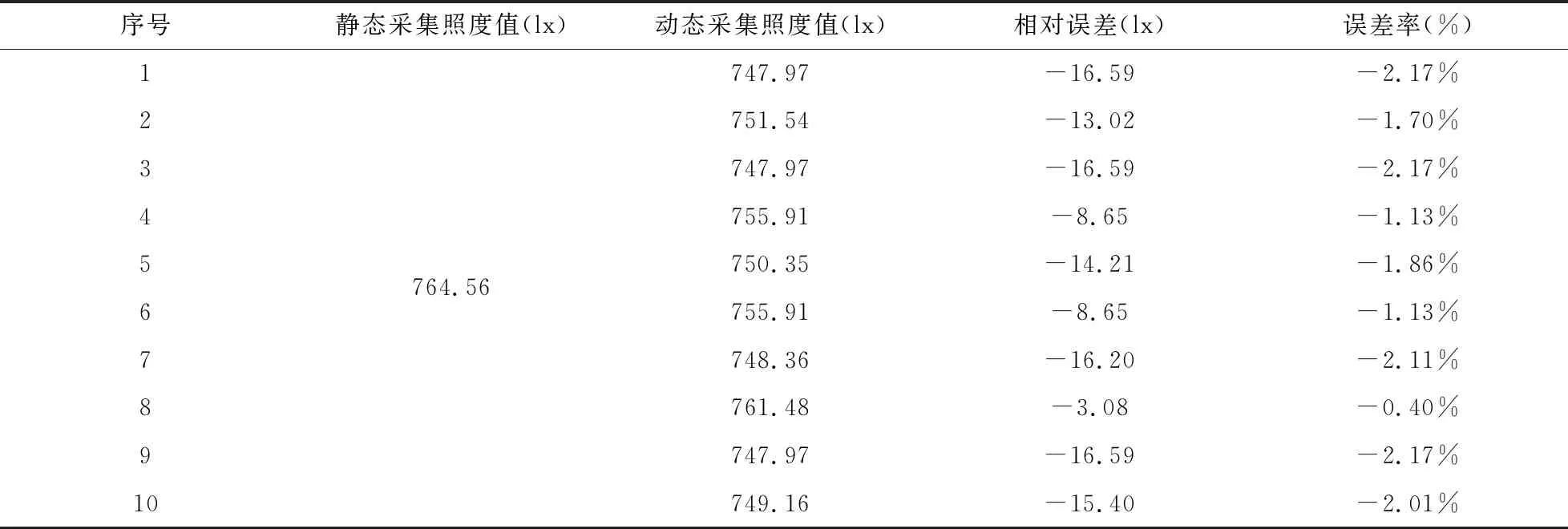
表2 静态采集与动态采集的照度值对比
5 结论
本文针对助航灯光照度高速动态检测技术,使用余弦校正器、视觉滤光片、硅光电池和光电检测电路模块,设计了满足要求的高速照度探测器,可以快速准确地测量灯光照度;并对研制的探测器进行了标定实验、静态精度实验和动态精度实验,实验结果表明误差均满足ICAO标准。结果表明,本文研究的高速照度探测器具有实用性,并可快速准确地获得灯光的照度和光强信息。
