跨介质飞航器动力分析
2020-03-10邵冬中国航发研究院
■ 邵冬 / 中国航发研究院
从20世纪20年代起,各国军事专家陆续提出了潜水飞机或者飞行潜艇等关于跨介质飞航器的方案或设想,但受工程技术水平的限制,均未成功转化至工程应用。受军事作战需求的牵引以及工程技术进步的驱动,跨介质飞航器的相关研究在21世纪依旧热度不减。
在军事力量激烈竞逐的大背景下,各国都在致力于建立起较为完善的反导系统。例如,美国海军装备的“宙斯盾”防空反导系统,具有反应快、火力猛、抗干扰性强的特点,随着该系统的进一步完善,未来从空中直接打击海上目标的成功率将明显降低。而目前所使用的水下武器主要是潜艇和鱼雷,其隐蔽性高、机动性强、水下打击能力强,被打击对象受限于有效侦察手段和防御手段的缺乏,较难建立起完整的防御体系。
针对海洋环境侦察与防御的特点,兼具空中高速巡航和水下隐蔽突防能力的跨介质飞航器将发挥多栖优势,实现对海上目标的有效打击。其作战特点为:具备远程快速飞行能力,能够快速抵达作战区域,为躲避空中雷达侦察潜入至数十米水下进行低速潜航,而后伺机实施水下攻击,或出水升空继续飞行实施空中攻击。
跨介质飞航器的作战特点对多种技术都提出了与传统飞行器和潜水器迥异的要求,其中,跨介质动力系统是支撑发展跨介质飞航器的关键,但是空中动力与水下动力在工作原理与工作方式各具特点、差异较大,较难统一。因此,跨介质动力技术已成为了制约跨介质飞航器技术发展的关键难点。

图1 苏联飞行潜艇概念图
跨介质飞航器的发展
对于跨介质飞航器,目前尚无统一的划分标准,纵观各国跨介质飞航器的发展历程(见表1),按照起飞质量大致可划分为:10t以下为小型飞航器,10~20t为中型,20t以上则为重型或大型。根据表1大致可以看出,已有的研究大都将重点放在了20t以上的大型武器平台和10t以下的小型辅助武器两个方向。
跨介质飞航器大型武器平台及动力概念方案由来已久
苏联在第二次世界大战之前就提出了“飞行潜艇”计划,并于1934年提出飞机和潜艇结合的武器装备设计草案(如图1所示),动力方案为:在空中采用3台约为895kW(1200 hp)的发动机,能以200 km/h的速度飞行,最大飞行高度2500 m;水下靠蓄电池带动螺旋桨电机航行,电机功率约为7.46kW(10 hp),航速仅为2~3 kn,活动距离最多不过9~10 km。该方案确定了飞机基本参数并制定了战术指标,但基于当时的技术条件,进入工程化研发的技术风险大,同时由于二战的爆发,苏联将精力更多地投入到技术风险小、见效快的项目中,最终由于技术和政策的双重影响,本项目未进入详细设计阶段。

表1 跨介质飞航器及动力方案
20世纪70年代,美国提出了一种大型潜水飞机方案,用作战略核武器的发射平台,以达到机动、分散部署战略核武器的目的。该潜水飞机具有机动性强、隐蔽性好等优点,其构型与大型水上飞机相似,机腹下有可收放的水翼,以缩短起飞距离,可携带2枚“北极星”A-3潜射战略导弹。由于主要用作发射平台,该方案并不强调水下航行能力,在水下只有有限的机动能力。在动力系统方面,飞行时采用普通的涡扇发动机,起飞质量180t;潜航时使用斯特林发动机,可在水下停留5天。受美国调整整体核战略的影响,该项目完成概念设计后便被搁置,并未进入研制阶段。
2008年,美国国防预先研究计划局(DARPA)提出一种混合飞行平台,旨在融合飞机的速度和航程、水面舰艇的游弋功能和潜艇的隐身能力。空中飞行由航空发动机驱动螺旋桨提供动力,水下潜航采用喷水推进,水下潜航时螺旋桨折叠。
上述的跨介质飞航器均为大型的战斗平台,它们的动力方案基本是分开独立的空中动力与水下动力的简单组合,一体化的跨介质动力方案仍属空白。
跨介质飞航器小型辅助武器动力蓬勃发展
美国提出将跨介质能力与小型无人机结合形成潜射无人机。这种无人机通常没有水下机动能力,由潜艇发射至水面附近,通过助推装置升空后依靠空中动力执行侦察或打击任务。
20世纪90年代,美国率先开展了潜射无人机的研制。“海上搜索者”为最早的潜射无人机;2003年,洛克希德-马丁公司在DARPA的委托下开始研制“鸬鹚”潜射无人机(如图2所示),它的动力方案是耗油率较低的涡扇发动机;2004年,美国海军研究实验室(NRL)开始研发基于燃料电池驱动的XFC潜射无人机(如图3所示)。
前文已提及,水下潜射无人机通常没有水下机动能力,它们的动力装置仅支撑其空中飞行,主要原因是无人机的体积及质量使得其无法承受两套独立的动力系统。如若此类无人机拥有一体化的跨介质水空动力技术支撑,那么势必会进一步增强其现有作战能力,并衍生出新的作战模式。

图2 “鸬鹚”潜射无人机

图3 XFC潜射无人机
跨介质飞航器动力需求
根据上文可以看出,被关注较多的跨介质大型飞行平台和小型辅助武器都具有一定的局限性,而对介于两者之间的中型跨介质飞航器则研究较少,其动力系统研究也尚未展开。中型跨介质飞航器的质量在十几吨量级,能够在空中高亚声速巡航,还可以在水下数十米的深度低速潜航,更加贴合跨介质的作战需求。以下针对中型跨介质飞航器的动力需求,具体分析对其适用的空中动力和水下动力。
水下动力分析
水下推进分为电动力推进和热动力推进两种方式。电动力推进装置主要由电池组、推进电机、控制系统、连接电缆、传动装置、推进器等组成。热动力推进装置由推进剂及能源储存系统、能源供应系统、发动机、推进器等组成。两种动力装置的推进器一般均为螺旋桨或泵喷推进器。
水下动力能成功应用的关键是比能量能够达标。比能量是衡量动力系统特性的主要指标,指的是能源动力系统的单位质量提供给推进器的能量。按照比能量,常见的水下热动力和电动力可大致划分为4个层级(见表2)。21世纪前,电动力推进在比能量上一直无法与热动力推进相媲美。21世纪后,随着铝氧化银等高能量密度电池的研制成功,电动力推进逐步走向应用,在比能量方面已与热动力系统水平相当。
铅酸电池是早期使用的可循环使用的充电电池,由于其能量密度过低(如图4所示),已基本被淘汰。铝氧化银电池是能量密度较高的电池组,但需要配备复杂的电解液系统,其能量密度只达到了OTTO-II燃料的60%左右,但得益于电动力推进系统结构简单、质量相对较小的原因,基于铝氧化银电池的动力系统比能量与使用OTTO-II燃料的动力系统相比较高。能量密度和比能量更高的则是锂离子电池装置,然而在实际工程应用中频频出现锂电池热失控爆炸问题,其爆炸产生机理复杂,短时间难以解决。另外,需要指出的是,电动力系统基本不存在排放,所以不会受航行深度的影响,也不会产生航迹,而对于非封闭式的热动力系统在这两方面则有较大的限制。
综上来看,在较小的潜深下,中比能量层级的热动力形式是较为成熟的水下动力系统,具体形式为活塞机或涡轮机,需要配合螺旋桨或泵实现水下推进。
空中动力分析
在亚声速的速域内,空中动力技术主要聚焦于活塞发动机与燃气涡轮发动机。活塞式发动机经济性好、耗油率低,所适用的速域较低且功率较小,一般用作轻型飞行器的动力,难以符合中型飞航器的功率要求。燃气涡轮发动机则有涡轴、涡桨、涡喷与涡扇等多种形式。其中,涡轴一般用作直升机的动力,限制了飞航器的构型,涡桨适用的速域较低,涡喷与涡扇形式的空中动力较为符合中型跨介质飞航器的动力要求。
中型跨介质飞航器动力关键技术
通过以上讨论,中型跨介质飞航器较为合理的水下动力方案是燃气涡轮或活塞式发动机,空中动力方案是涡喷或涡扇发动机。将两者应用在跨介质飞航器上的常规做法是,采用分开且独立的空中动力与水下动力的简单组合形式(如图5所示),但这种简单的组合存在系统集成度差、结构不紧凑、功能单一、质量大等问题,难以发挥飞航器的作战优势。
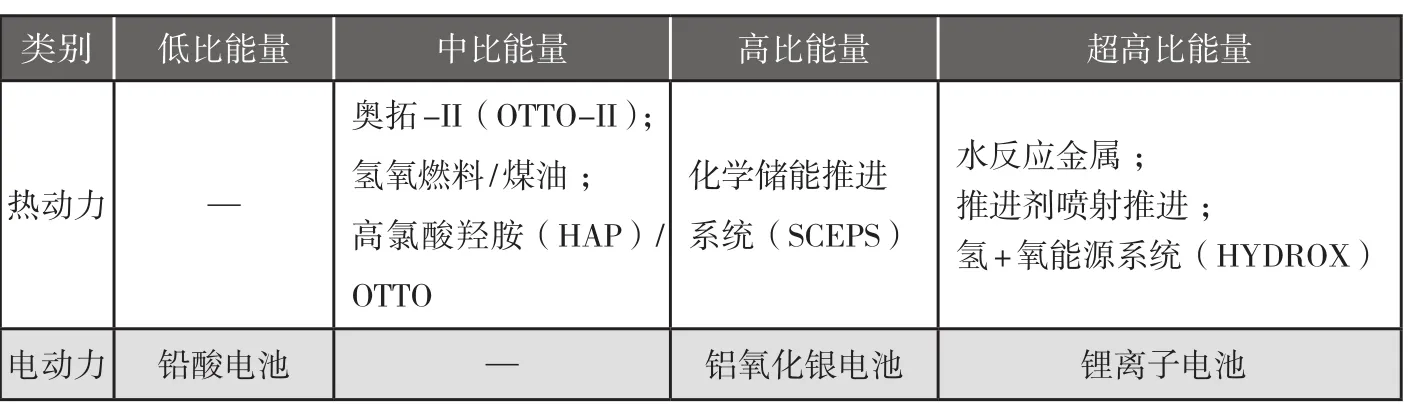
表2 动力系统按比能量分类

图4 电池和热动力燃料能量密度对比
与此同时,空中燃气涡轮发动机和水下涡轮推进系统在燃烧室设计、涡轮设计和流路设计等方面具有相似性。伴随着技术发展,两种动力形式具有一定的功能和结构融合设计潜力,将有利于提高动力系统的集成度、结构紧凑度,从而减轻动力系统的结构质量,提升作战效能。该动力系统将根据飞航器的出水、入水情况进行喷气推进模式与喷水推进模式的切换,从而持续为跨介质飞航器提供动力。
通过分析,空中动力和水下动力相融合所涉及的关键技术有以下几种。
适用于多环境介质的动力系统总体构型
在明确动力系统的功能需求、性能要求以及构型限制的前提下,需要综合考虑多种热力循环的特点及热力循环参数的协调,基于燃烧室、涡轮等关键部件的共用性,并结合模式切换对调节机构的需求,构建紧凑的空水流路布局,从而形成高度集成的跨介质飞航器动力系统构型。
适用于多种燃料的燃烧室技术
飞航器在空中飞行时,动力系统以航空煤油等作为能源。飞航器在水下潜航时,动力系统以水下推进剂作为能源。在不同介质工作环境下,伴随着动力输出功率需求以及所使用燃料的变化,燃烧室的压力、温度以及工质流量等工作条件均会存在较大变化,燃烧的组织形式也需要进行相应调整。燃烧室须保证适用于多种燃料的工作特性。
宽范围高效率工作的涡轮技术
水介质的密度比空气介质大两个数量级,黏度大一个数量级。结合环境介质特性,基于跨介质作战需求,跨介质飞航器在水下需要的动力输出功率较空中小很多,动力系统工质流量会在宽范围内变化,致使涡轮处于大范围的变工况条件下工作。通过改变叶片安装角的变几何涡轮,作为调节和改善涡轮工作特性行之有效的措施,已成为叶轮机械方面的研究热点,广泛应用于航空、船舶与石油化工等领域。与之前应用的不同之处在于,跨介质动力中涡轮工况变化范围更宽,单纯的变几何涡轮技术可能难以实现,可在此基础上辅以一定的气动调节手段,例如在导叶喉部位置引入射流等。
动力系统模态转化技术
跨介质飞航器动力系统,可根据飞航器所处环境与作战任务需求,对自身的工作模态进行自适应调整。其工作模态有空中飞行、入水潜航、水下潜航和出水飞行等多种。模态之间的调整转换对动力系统的稳定产生较大冲击。
首先,动力系统在内部须通过各种调节机构实现流路、燃料供应、部件工作特性等调整,其中涉及复杂的容积效应、机械惯性与热惯性等均可影响到动力系统总体性能的安全过渡。
其次,动力系统在外部会受到外部工作介质的影响,出入水时由于空气、水两种介质物性急剧变化导致的力学冲击和温度冲击也会干扰动力系统模态平稳转换。

图5 空中动力与水下动力的简单组合
结束语
中型跨介质飞航器具有良好的应用作战潜力,有利于实现空海一体化作战,其中跨介质动力系统则是兼顾远程飞行与水下潜行综合作战模式的根本支撑,也是需要被重点突破的瓶颈所在,而空中动力与水下动力从简单相加向高度相融的跨越则是改善目前动力系统弊端的重要技术手段。