6 000 m深海搜寻无人潜航器工作原理与试验验证
2020-03-09黄习刚杨伟光
贺 辙,黄习刚,杨伟光
(交通运输部南海救助局,广州 510000)
0 引 言
2014年3月8日,马航MH370客机失联事件发生后,救捞系统积极参加了失联客机海上搜寻工作。在充分展示专业救助和抢险打捞能力的同时,也暴露出与实际需要和国际一流水平存在较大差距,其中深海搜寻能力尤为明显。失联客机搜寻海域水深超过5 000 m,执行水域搜寻任务需要6 000 m级专业搜寻定位打捞设备,彼时我国救助打捞装备还未能实现深海水下遇险目标物的搜寻与探测。
随着“一带一路”倡议、海洋强国等国家战略的推进实施,海上运输通道已成为我国的海上生命线,海上交通安全和船舶溢油风险不断加大,加之我国海洋开发活动不断走向深海,东海、南海海洋权益争端日益严峻,使深海交通安全形势更加复杂,对提高深远海应急保障能力需求迫切,水下无人潜航器作为水下探测、目标识别的工具,在深远海水下搜寻救助领域的应用推广势在必行。2015年5月,经交通运输部规划司以交规函〔2015〕397号批复,由南海救助局从冰岛Gavia公司引进了一套SeaRaptor 6000深海搜寻无人潜航器。
水下无人潜航器(autonomous underwater vehicle,AUV),其主要任务包括水下自主探测、目标识别等。目前,国外研制并应用于深海的AUV主要有美国Hydroid公司的Bluefin-21、英国南安普顿国家海洋中心的Autosub 6000、加拿大ISE公司的EXPLORE、挪威Kongsberg公司的REMUS 6000和HUGIN 4500、法国ECA公司的A6K及冰岛Gavia公司的SeaRaptor。国内目前也逐渐加大了在深海AUV方面的研究和应用的投入,例如沈阳自动化研究所研制的CR-02潜龙系列等。
1 AUV总体结构
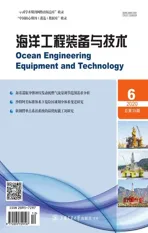
该套6 000 m深海搜寻无人潜航器,根据深海搜寻特点和需求,由Teledyne Gavia公司设计、制造而成,是我国目前唯一一套通过国外采购应用于深远海搜寻救助领域的自主式无人潜航器,其最大工作深度可达6 000 m,潜航器主体长5.5 m,直径为0.63 m,重1.15 t,最大巡航航速为4 kn,最大续航力约为400 km。潜航器总体结构布置如图1所示。
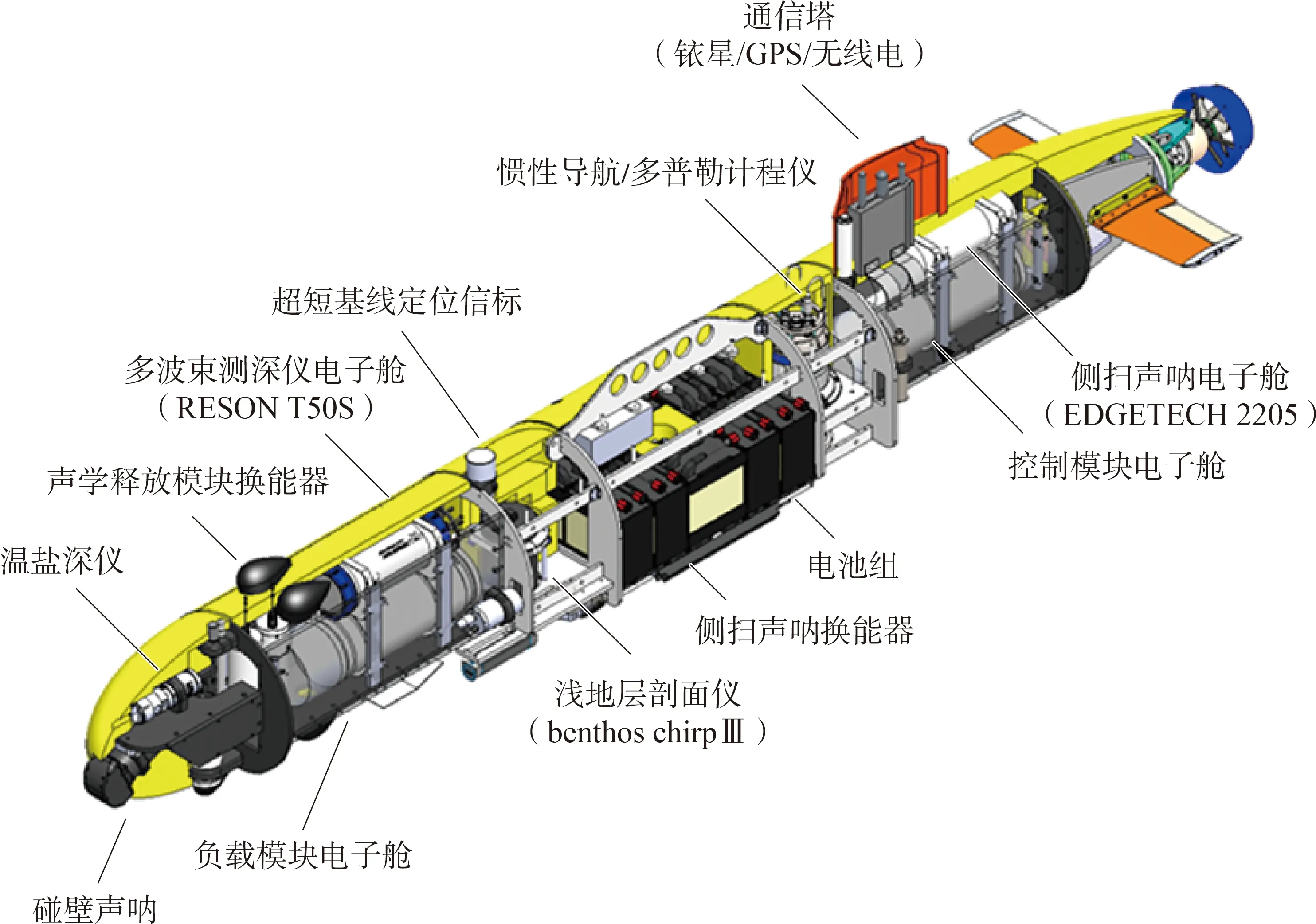
图1 AUV总体结构
AUV按照功能的不同主要分为负载、控制、导航定位、推进和通信应急五大模块。其中负载模块由声学探测、光学探测和水文参数测量组成,主要集成了侧扫声呐、多波束测深仪、浅地层剖面仪、水下相机、黑匣子定位仪、温盐深传感器、前视避碰声呐等各类探测设备,用于对水下遇险目标探测、照相以及海底地形地貌测量;控制模块是AUV的核心,包括甲板面控制单元及水下潜航体控制系统,负责AUV任务管理、测线规划和水下自主航行;导航定位模块包括超短基线定位、惯性导航、多普勒计程仪和卫星定位系统,水下作业通过组合导航的方式为AUV提供实时精准位置信息;推进模块包括电力系统和尾部推进系统,为AUV水下自主航行提供动力;应急模块是深水AUV的关键部分,包括用于与甲板面通信的水声通信模块、无线电通信和卫星通信,用于保障设备作业安全的声学释放器、超短基线信标、应急定位信标、无线电信标和频闪灯等。
2 关键技术
深海搜寻AUV涉及关键的技术主要有导航、通信、任务监测控制、测量和数据的分析处理等。
2.1 导 航
AUV水下作业导航采用的是光纤惯性导航(INS)和多普勒计程仪(DVL)的组合导航系统,外加超短基线(USBL)、GPS、前视避碰声呐以及深度计辅助,导航精度可达到航程的0.1%DT(CEP50),能保证AUV在水下长时间按照规划的测线作业。
为解决惯性导航误差随时间漂移的问题,采用超短基线定位系统实时更新潜航器初始位置,并将位置提供给惯性导航系统。AUV在深水作业下潜过程中,由于DVL未能跟踪到海底,潜航器只能依靠USBL提供的数据作为惯性导航系统计算的初始位置,从而消除时间上的误差。而AUV在水下测线作业过程中,DVL能够对惯性导航系统计算的速度进行修正,同时接收USBL提供的位置数据更新,进一步提高了AUV水下导航精度。但是如何保证USBL本身数据的精度是目前水下作业值得探讨的一大热点。
2.2 通 信
AUV通信系统不只是水下通信,而且是水声通信、无线电通信、卫星通信、光纤通信和以太网通信等的结合,主要用于潜航器与潜航器或者其他平台的通信,实现信息的双向传输。
作为关键技术之一,水声通信成为目前AUV深海水下作业唯一可以与工作母船进行通信的方式。水声通信传输速率低,通信距离可达几百米至几十公里,但是通信可靠性受到温度、盐度以及环境噪声影响大,而且无法跨越水与空气界面传播。目前水声通信技术主要朝着水声信道编码技术、水声扩频技术等方向发展,不断研究如何改善水声通信的质量。
2.3 监测控制
AUV监测控制系统包括甲板控制端和潜航器控制中心,该项技术包括潜航器任务测线规划,水面操纵,水下作业过程实时监测,作业后数据的下载分析,潜航器自主状态检查、自主避开障碍物以及自主航行,根据AUV水下作业状况,自主完成故障以及应急处理。
2.4 测 量
综合利用水下相机、黑匣子定位仪、多波束和侧扫声呐进行水下探测,保证深海水下遇险目标物搜寻的高效性和准确性。未来随着AUV模块化技术的发展,可以根据现场任务需要,选择搭载不同的测量传感器。
其中,AUV搭载的EdgeTech2205型号双频同步侧扫声呐,频率为230 kHz和850 kHz,跨径分辨率低频时优于5cm; SeaBat T50-S型双频多波束,频率为200 kHz和400 kHz,有512个波束,覆盖宽度150°,分辨率为6mm; Benthos chirpⅢ浅剖仪频带范围1.5~8 kHz,垂向分辨率大于15 cm;黑匣子定位仪以37.5 kHz为中心,覆盖5 kHz频段,可接收35~40 kHz范围内的信号;水下相机由一个位于潜航器中部的摄像头和位于首尾的两个LED闪光灯组成,水下闪光灯可提供高达15万流明的输出。
2.5 数据分析处理
通过水面控制中心集成软件Controlcenter来实现对AUV水下采集的数据、图像以及系统本身的记录文件进行下载和分析。侧扫声呐、多波束和浅地层剖面所采集的图像数据在Controlcenter软件中分别以jsf、 s7k、 sgy格式记录,可通过Caris、 SonarWiz等后处理软件进行图像展示和精细化处理。
3 海上试验
海上试验分浅水和深水两阶段进行。考虑到海洋环境的复杂性,试验目标物的投放不可控,浅水试验区域水深为170 m左右,主要完成对导航精度及AUV所搭载的多波束、侧扫声呐、水下相机、黑匣子定位等探测传感器的目标辨识能力测试。考虑到南海海域水深限制,深水试验区域水深为3 500 m左右,主要对深水条件下潜航器操纵性能、系统运行可靠性与稳定性以及导航性能等进行检测。
3.1 试验方法
3.1.1 导航精度测试
在水深为170 m的试验区域,为确保整个组合导航精度测试过程DVL可有效地跟踪,潜航器导航系统经卫星定位装置有源校准后,记录初始位置。设置一条长约5 km的测线,设置潜航器以3 kn的速度定高50 m沿测线直线航行。航行到达预定目标点后上浮至水面,记录浮出水面位置的惯性导航单元数据与同时刻的差分GPS定位数据,分别计算惯导获取的航行距离与GPS获得的航行距离,计算导航精度。
3.1.2 目标物识别能力测试
(1) 目标物布放。
首先通过单波束测深仪或对照水文资料对试验海域进行深度及海底地形确认,并在选定的区域内投放目标物,记录目标物落水时的位置,作为后续测试过程中潜航器路径规划的位置参考。试验中主要采取两种目标物对潜航器发现目标的能力进行检测,一种是边长为100 cm的水泥立方体,另一种是能够持续发射黑匣子信号的发射器。
在试验中,为了增加目标的辨识性,将水泥目标物与废弃轮胎捆绑在一块,同时用长度2 m的缆绳将黑匣子信号发射器与水泥块连接,如图2所示,水泥块将发射器带入海底,同时为了增加水下相机的辨识度,在水泥块各个面涂上标志油漆带。

图2 试验目标物
(2) 测线规划与数据采集。
试验任务共分两个航次开展,第一个航次以记录的布放点为中心规划测线,利用侧扫声呐和多波束初步确认目标物在海底的可疑位置。
在初步确认目标物可疑位置后,开展第二个航次任务,以目标物可疑位置为中心规划精细测线,综合利用侧扫声呐、多波束测深仪、黑匣子定位仪和水下相机在潜航器离底30 m、 10 m、 7.5 m、 5 m等不同高度对可疑目标物进行探测和搜索,并对采集数据进行分析处理,检测侧扫声呐、多波束、水下相机对目标物的探测能力以及黑匣子定位仪不同方位的接收信号能力。
3.1.3 深水测试
试验任务共一个航次,依照潜航器不同的定高来规划测线和测量传感器的设置,每条测线长1 km,通过观测潜航器水下航行情况及出水后数据情况,检测深水条件下潜航器的耐压、操纵性能、系统运行可靠性与稳定性以及导航性能。测试任务规划如图3所示。
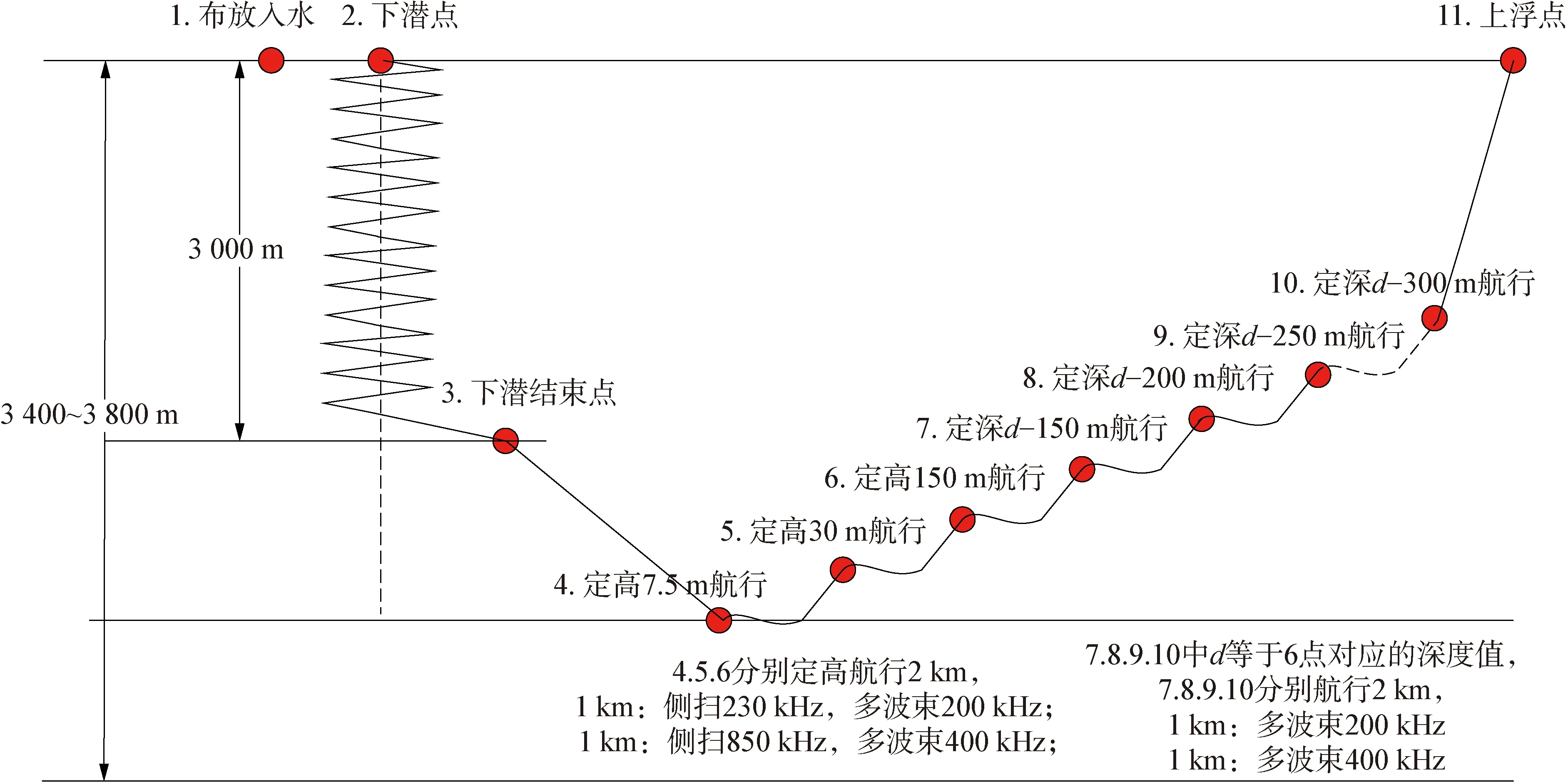
图3 深水试验任务规划
3.2 试验结果
经数据处理分析,水下相机、侧扫声呐、多波束、黑匣子定位仪等采集的数据及图像均能从不同方位和不同水深检测到所投放的目标物。其中侧扫声呐和多波束测深仪均能很好地呈现被测海底地形地貌图像,黑匣子定位仪能从不同方位接收到投放的黑匣子信号。不同探测传感器搜寻识别目标物效果如图4所示。
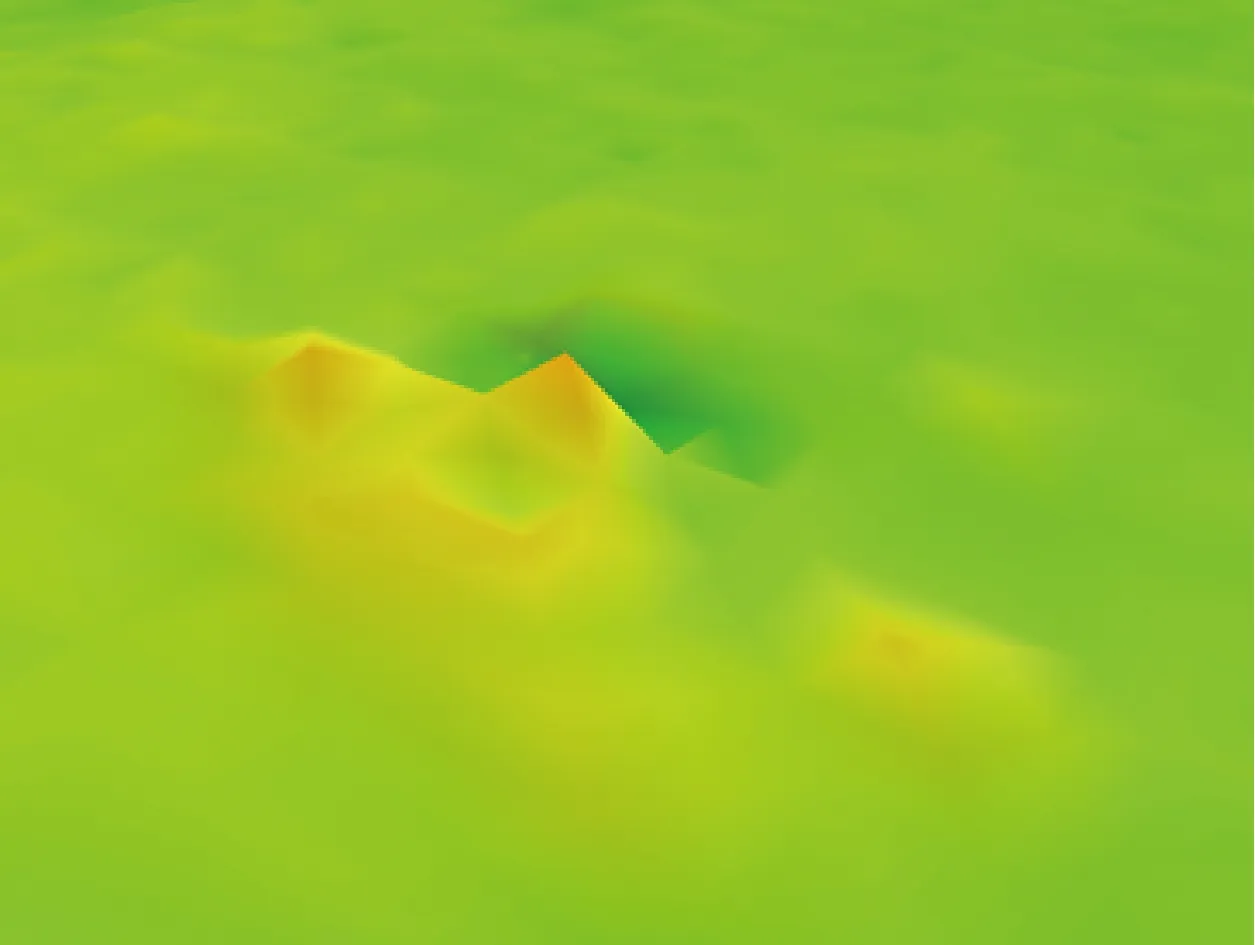
图4 400 kHz多波束测深仪探测目标效果
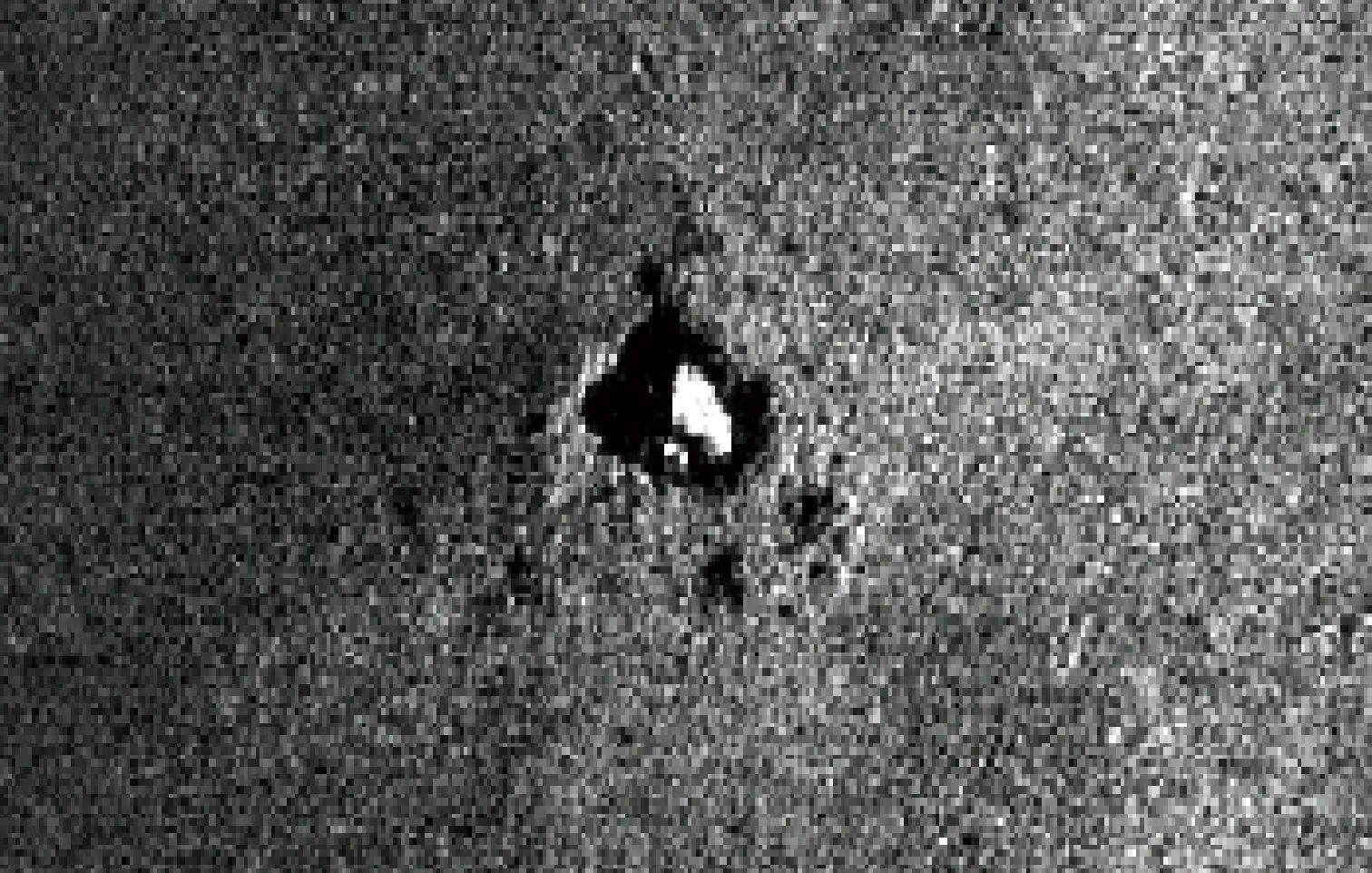
850 kHz侧扫声呐扫测目标效果

水下相机搜寻目标物效果
根据试验结果,AUV各主要技术指标如表1所示。
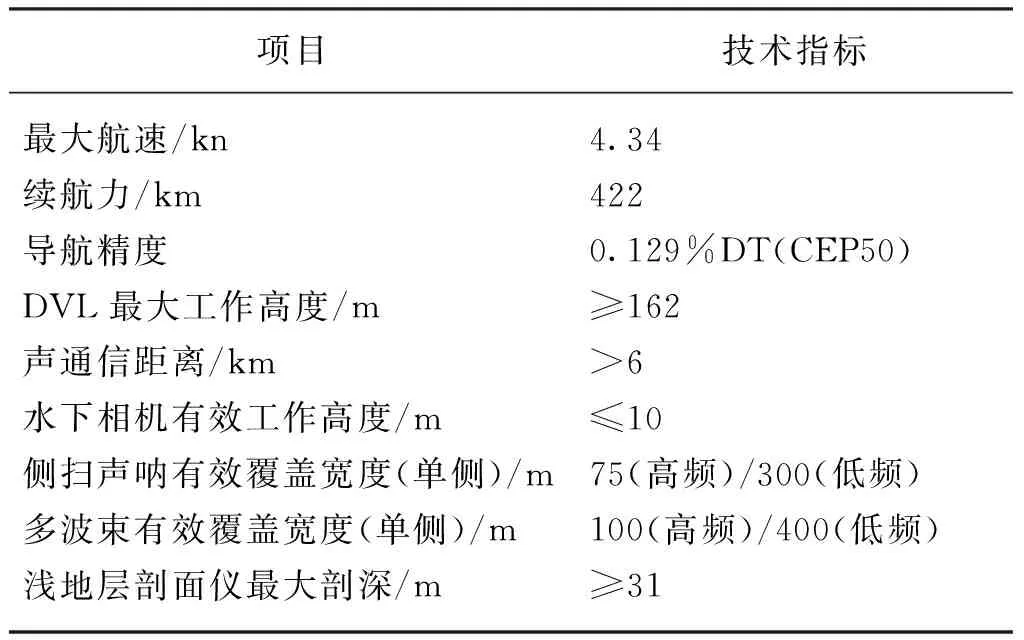
表1 试验测得AUV主要技术指标
潜航器在作业过程中姿态稳定,动力系统工作状态正常。潜航器航行期间通信良好,且在水下能依照预设路径很好地完成自主航行。在作业过程中,某一时段潜航器姿态数据如图5所示。
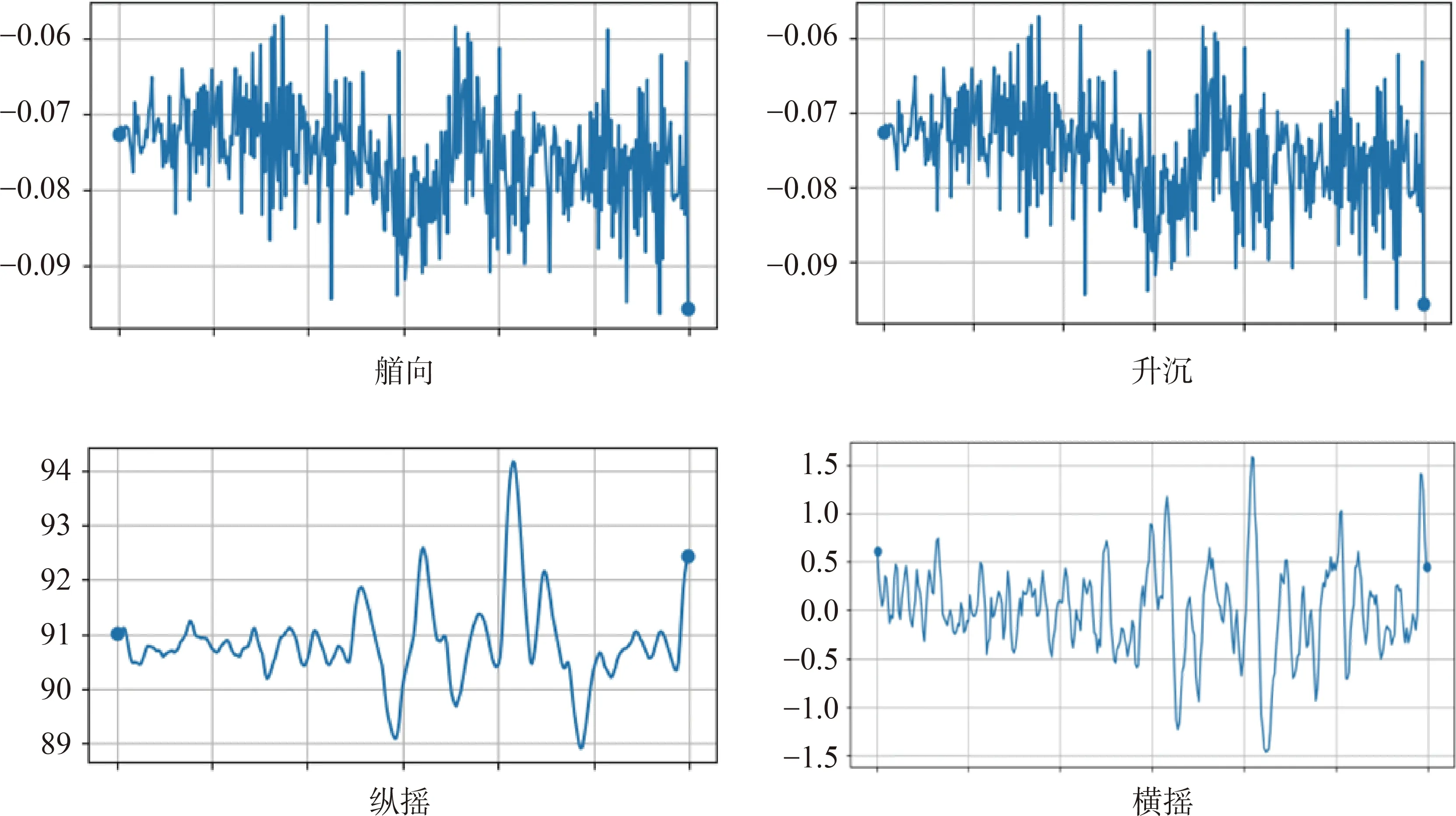
图5 潜航器3 400 m水下作业姿态
4 结 语
本文结合工程试验应用,介绍了深海水下遇险目标物搜寻方法及流程,验证了深海搜寻6 000 m无人潜航器实际作业稳定性以及水下搜寻探测技术的准确性。试验结果表明,综合利用水下相机、黑匣子定位仪、多波束水深数据和侧扫声呐声图进行遇险目标物识别,保证深海水下遇险目标物搜寻的高效性和准确性,大大提高了水下搜寻效率,对其他类型深海AUV的设计和应用具有一定的指导意义。但是在使用过程中,AUV在布放回收方式和水下通信质量方面仍然需要改善和提高,可以考虑AUV水下回收来降低水面回收的风险,通过降低工作母船的噪声来改善水声通信环境。
总之,通过AUV在深海水下目标物搜寻的应用,使得目前的搜救技术日趋完善,搜救手段更加先进,搜救劳动强度大幅降低,工作效率显著提高,实现了深远海水下搜救的自动化,而且能满足不同的工程需要,未来随着AUV技术的成熟,人们对新技术新设备不断地认识和接受,AUV在深海水下搜寻救助上会拥有巨大的优势,会发挥更大的作用。