具有附加食物的非自治捕食者-食饵系统的持久性与稳定性
2020-03-08吴罗义
武夷学院学报 2020年12期
吴罗义
(武夷学院 数学与计算机学院,福建 武夷山 354300)
防治害虫的方法主要有两种:化学控制和生物防治。化学控制主要通过反复使用杀虫剂达到消灭害虫的目的,但是消灭害虫同时也污染了环境.生物防治是一种比较环保的方法,主要通过增强捕食者对害虫的捕食能力,增加目标害虫的死亡率。常用方法是通过提供额外食物以提高捕食者的捕食效率[1-3]。最近,Basheer等[4]研究了一类附加额外食物的自治Holling-Tanner系统的平衡点存在性和稳定性,分析了如何通过提供的额外食物达到生物防治等问题。

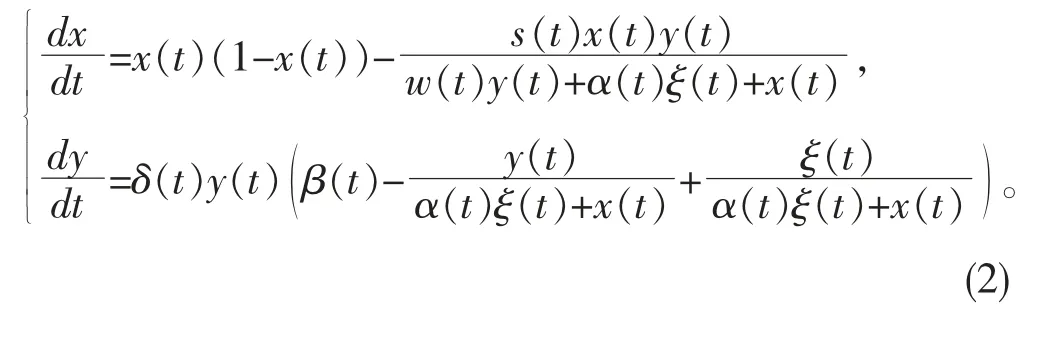
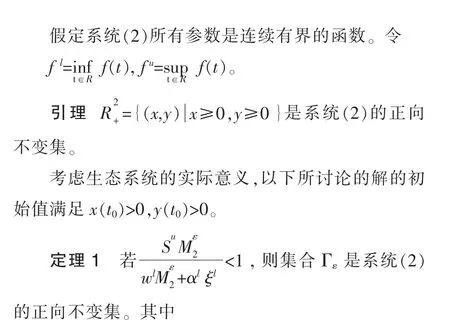
式中:x(t)和y(t)分别代表害虫和捕食者的密度,ξ和α分别表示附加食物的数量和质量,其他参数的意义参照文献[4]。但是,许多生物参数和环境参数是时变的,当考虑到这些因素时,相应的模型应当是非自治的,许多学者关注非自治模型并讨论了系统的动态行为,如持久性、正周期解的存在性和稳定性等相关动力学行为[5-9]。据笔者所知,目前没有文献讨论系统(1)的非自治模型。因此,本文将研究其非自治模型的持久性和全局稳定性等动力学行为。
1 持久性

2 全局稳定性