高深竖井滑模施工监测与纠偏技术
2020-03-06舒志勇,刘兴华,段科峰
舒 志 勇,刘 兴 华,段 科 峰
(中国水利水电第十工程局有限公司,四川 都江堰 611830)
1 概 述
毛尔盖水电站是四川省阿坝州黑水河流域水电规划两库五级开发方案中的第三级电站,调压井位于厂房后边坡山脊上,为露天式超深竖井,采用开敞阻抗式结构,井筒为圆形断面,开挖直径为26 m,混凝土衬砌后的内径为22 m,下部隧洞底板高程2 015 m,顶部高程2 186 m,竖井高度171 m,阻抗孔直径为4.5 m,井筒采用钢筋混凝土衬砌,厚2 m,从空间规模角度出发曾被誉为“亚洲第一井”。
该调压井施工期间采用全站仪控制竖直偏差,规范要求小于5 cm,该要求对于170 m高的地上建筑物而言不是难题,但对于地下建筑物而言却非易事。为保证调压井混凝土衬砌结构面的垂直度,开挖结束后,首先对其顶部和底部两套独立的坐标系统采取联系测量[1]的方式,以保证施工测量控制网的精度,然后在混凝土滑模浇筑阶段进行“实时监测”控制,要求每5 m对滑模进行一次检测与校正。
但在混凝土滑模施工期间,所面临的最大困难是对滑模倾斜的检测与校正。而以现有的设备条件只能在滑模平台上架设仪器。因此,如何将坐标和高程传递到滑模平台上是实现“实时监测”的前提。笔者对超深竖井滑模施工的倾斜检测与校正归纳和总结了一些经验,旨在为今后同类型超深竖井施工借鉴。
2 滑模滑升前的准备工作
为保证调压井混凝土衬砌满足设计要求,滑模滑升前需完成一系列的准备工作,以做到测量监测与纠偏从源头控制,具体的控制项目包括:测量控制点联测复核、滑模模体平面位置测量控制、滑模模体高程面测量控制以及竖向激光导向束布置。
2.1 调压井控制点的联测
该工程对调压井井身混凝土的形体偏差要求≤5 cm,但对闸门槽的精度要求更高。为控制混凝土形体浇筑质量,在滑模测量定位前,对调压井顶部与底部的施工测量控制点进行了联测,以保证井内外控制点在一个坐标系统内。控制点的联测严格遵循《水利水电工程施工测量规范》DL/T5173—2003[2]的要求,采用光电测距四等闭合导线实施。以垂线法由地面吊线向井内投点,使井内外的控制点产生联系,进而使导线成为以投影点为闭合点的“单点闭合导线”。导线测完后进行闭合差计算,待闭合差满足规范要求后对测量成果进行平差[3],使用平差后的数据进行放样。
2.2 滑模模体平面位置的测量控制
首先浇筑调压井底板,在混凝土底板上安装滑模。安装滑模前,测量人员在混凝土底板上放出混凝土内边界线,滑模安装启滑前,校正滑模模板边线与已放出的混凝土内边界线是否对齐,以确定其平面位置是否正确。
2.3 滑模模体高程面的测量控制
滑模启滑前,测量人员在高于井室底板位置放出3~4个同一高程面的高程点,作为滑模滑升高程的反算起点。滑模滑升每5 m左右用钢尺或全站仪测量反算起点至滑模平台的高差,并用油漆在已浇筑的混凝土面上做好标记,作为下一仓滑模滑升高程的起算点。
2.4 竖直激光导向束的布置
对于平面坐标的传递,采用激光投影的方法。滑模安装前,在调压井顶部固定三个激光指向仪,激光指向仪的位置应尽量接近等边三角形且距调压井中心的距离适中。测出三个激光指向仪的中心坐标并在调压井底板混凝土面上放出这三个点,调整激光指向仪,使其各自指向其坐标对应的点,即形成从调压井顶部到底部的三条垂直激光导向束。
3 滑模滑升偏移的检测
滑模滑升过程中,通常因爬升千斤顶升降不同步、多循环累计后造成滑模发生较大偏移,为避免持续的偏移酿成重大质量、安全事故,施工测量人员需要“实时监测”滑升的偏移程度。一般情况下应重点检测以下几点:滑模水平度的检测、滑模平面位置的检测、滑模滑升高程的检测。
3.1 滑模滑升水平度的检测
在滑模主平台上布置由四支透明塑料管装水而成的简易水平计,水平计的位置应尽量接近调压井的纵横轴线且距调压井中心的距离适中。在滑模安装结束、启滑前提空滑模,用测量仪器校平滑模,在每支水平计旁固定一最小刻度为毫米的钢尺并标记其水面初始位置。滑模滑升过程中,监测每支水平计内的水面相对最初水平标记用以判断滑模模体的水平度,发现水面倾斜时,及时校正滑模的水平度。操作时先调整横(纵)轴线,再调整纵(横)轴线。
3.2 滑模滑升平面位置、高程面及竖直倾斜度的检测
3.2.1 全站仪配合激光导向束监测滑模水平位置及其倾斜度
现场操作时,采用测角精度2″、测距标称精度2+2 ppm的全站仪,激光测量功能的有效距离为1 000 m。测量过程充分利用全站仪的后方交会功能[4],选取滑模平台比较稳定的地方作为全站仪长期架站的位置,将三块透明的平板置于滑模平台面,使三条激光束投射到平板上得到三条激光束的坐标。目前大多数全站仪均具有后方交会功能,使用全站仪后方交会三个激光束投影坐标,计算出架站点坐标并定向。一般全站仪的后方交会功能可以观测2~5个点,采用“最小二乘法”进行平差计算,成果更加可靠[5]。后方交会三点,测量精度完全可以达到施工要求。后方交会前,在仪器内设置测量限差,使平面坐标标准差在1 cm以内。由于滑升过程中对绝对高程的要求不高,故高程的标准差可以适当放宽。后方交会得到架站点坐标并定向后,检查测站点的标准差,如果在设置的限差范围内便可对滑模进行检测。若多次检查标准差超限,则限差的设置可以适当放宽,但精度应满足设计要求。在滑模模体平面位置确定后,首先在模体上用全站仪放出六个控制点,控制点的分布为调压井纵、横轴线以及闸门槽永久面各两个。在滑模滑升过程中,使用全站仪后方交会功能测出六个固定点的坐标并将其与原始坐标比较并填好滑模模板记录检查表以计算控制点偏中值(表1)。为了更形象、直观,在CAD上画出理论模体平面图并标出实测的六点,移动模体平面模块,尽可能多地让以上六点落在调压井纵横轴线及永久面上,即可得到滑模的实际位置,将其与理论位置相比较来判断模体偏移及扭转情况,特别是闸门槽的偏移情况(图1)。
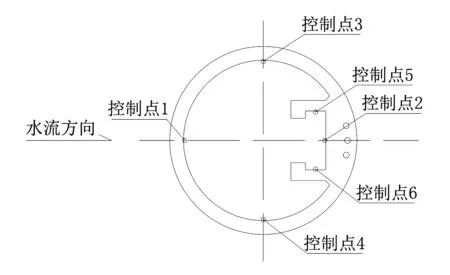
图1 滑模检测示意图
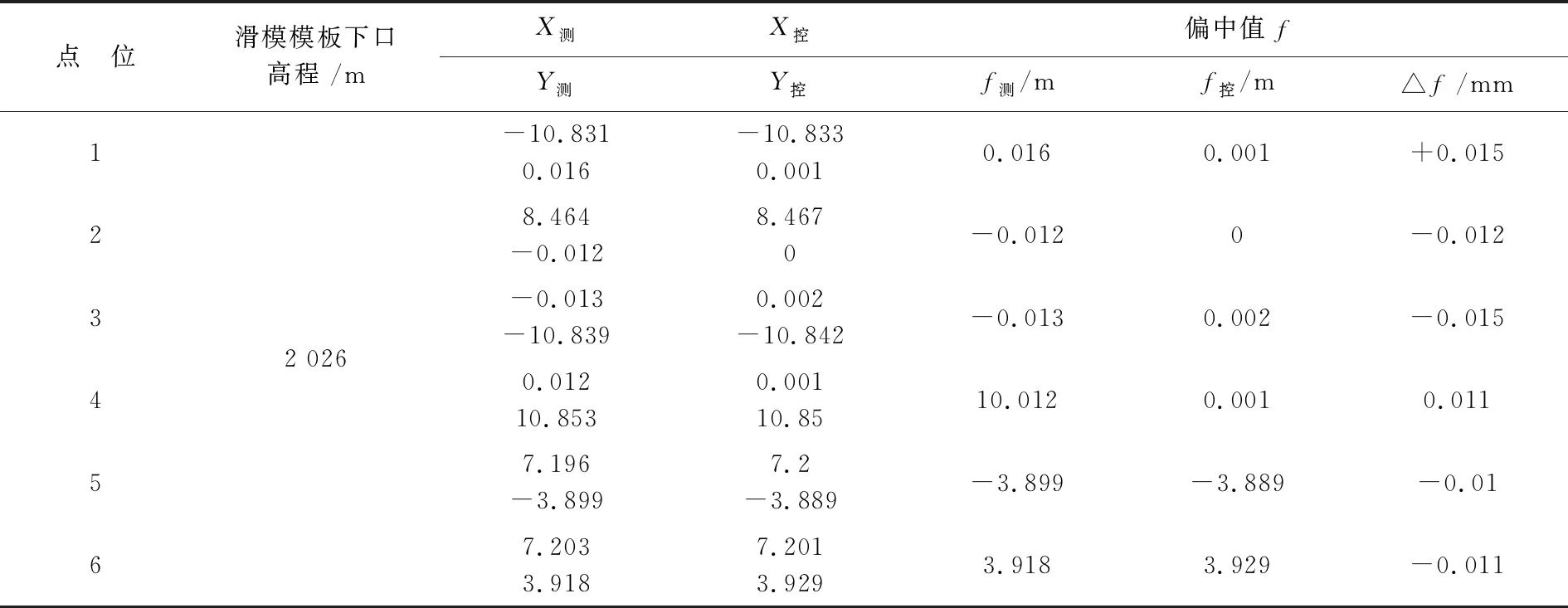
表1 滑模模板检查记录表
说明:表中X测、Y测为控制点的实测坐标;X控、Y控为控制点的原始坐标;f测为偏移轴线的测量值,即控制点1、2的实测Y值,控制点3、4的实测X值,控制点5、6的实测Y值。f控为偏移轴线的原始值,即控制点1、2的原始Y值,控制点3、4的原始X值,控制点5、6的原始Y值。△f=f测-f控。
3.2.2 闸门槽的倾斜监测
调压井闸门槽的倾斜度至关重要。因其直接影响到金属结构的安装,需在滑模施工中加强对闸门槽的监测,每滑升5 m左右,用10 kg重锤检测闸门槽各边的垂直度,10 kg重锤足以减弱重锤振幅和风对重锤的影响。检测时,滑模停止作业,以确保检测的准确度。
通过采取以上几种方法综合判断滑模滑升的水平度、平面位置及倾斜度,并将其作为调整滑模的依据。
4 滑模滑升偏移的校正
毛儿盖电站调压井滑模滑升期间,滑模滑升偏移检测虽实时进行,但由于测量仪器的误差无法消除,多循环累计后仍会发生滑模偏移现象,因此,必须采取有效的纠偏措施予以校正。通常需完成滑模水平度、偏移及倾斜度的校正。
4.1 滑模滑升水平度的校正
用不均衡爬升滑模与不均衡混凝土入仓法调整滑模的水平度。若发现模体水平度超过许可范围,在滑升时,关闭偏高侧几个液压千斤顶进行不均衡爬升,先浇筑偏高侧混凝土并振捣,后浇筑低侧混凝土。所关闭千斤顶的个数视不同水平度程度以及保证滑模整体稳定而定,不能操之过急,需要经几个循环过程缓慢完成调整。
4.2 滑模滑升偏移及倾斜度的校正
当断定滑模偏移及倾斜度超过其许可范围时,需要采取加外力的方法进行校正。最初采用花篮螺杆加外力法,但因模体太大效果不明显;随后采用手拉葫芦架外力法进行校正。将3至4个5 t手拉葫芦在偏离侧一端挂在围岩支护锚杆上,一端挂在模体主平台桁架上,当滑模滑升时,用均衡适度的力同时收紧葫芦将模体强行拉向原位,通过一个循环调整回80%的偏离,在进行正常滑
升两个循环后再进行正常的调整。调整时,手拉葫芦的一端只能挂在支护锚杆上,可以把几个锚杆连接在一起作为基础以增加受力强度,但绝不能挂在制作的钢筋笼上,以免引起安全事故;另一端只能挂在主平台的主桁架上,而挂在其他部位有可能将其损坏且拉不动模体,也不能挂在支撑杆上。校正前,先用全站仪在稍高于滑模模板上口的开挖岩石面上放出调压井横纵轴线,校正滑模使控制点1、2,3、4趋近各自的轴线,调整完毕实测控制点5、6并计算其△f值作为校正效果的参考依据。
5 结 语
毛尔盖工程采用上述方法监测与控制滑模滑升偏移与倾斜度,衬砌完成后实测调压井混凝土最大偏移量为3.5 cm,满足最大偏移不超过5 cm的要求。激光指向仪配合全站仪的办法解决了仪器架站难的问题,真正做到了“实时监测”,为滑模的纠偏提供了重要依据,对调压井滑模施工质量的控制起到了关键作用。所取得的经验可为类似高深、高大建筑物的施工提供参考。
