基于电流估算的永磁同步电机伺服控制系统设计
2020-03-06孙宇航姚文熙吕征宇
孙宇航,姚文熙,吕征宇
(浙江大学,杭州310027)
0 引 言
伺服电机控制系统由位置环、转速环和电流环组成,可以实现电机转子位置的精确控制。这样的控制系统需要电流传感器、速度和位置传感器提供电流、速度和位置测量值反馈来实现闭环控制。传感器的使用会增加系统的硬件成本,为了减少硬件成本,减少传感器的数量成为电机控制的研究方向之一。其中,无位置传感器控制技术被广泛深入研究[1-2],并且取得了较好的速度控制效果。但是,在对于位置精度要求较高的伺服控制场合,需要位置传感器来确保位置控制的精度和可靠性,反而对电流控制的质量和波形要求相对较低,因此选择减少电流传感器的控制技术也开始成为一个重要的研究方向。文献[3]根据当前研究中无电流传感器控制结构的不同,将无电流传感器控制方案进行了归纳整理,根据控制结构将其分为三大类:有电流环的PI 控制[4]、有电流环的预测控制[5]和无电流环控制[6]。
本文基于传统的电流环PI 控制结构,不使用电流传感器,通过电机定子电压方程推导得到离散化的电流方程表达式,对定子电流进行实时迭代估算,实现电流环控制。无电流传感器控制系统由位置环、转速环和电流环组成,本文对三个控制环分别进行了建模分析与控制器参数设计,并通过闭环Bode图分析了系统带宽,利用仿真验证了控制器参数的效果,并通过位置阶跃响应实验和正弦轨迹跟踪实验实现了电机的伺服控制,验证了无电流传感器电机伺服控制系统的有效性和可行性。
1 永磁同步电机伺服控制系统设计
传统的永磁同步电机(以下简称PMSM)伺服控制系统如图1 所示。其主要由MCU 控制器、电机驱动、角度传感器、电流传感器和电机组成。其中表贴式永磁同步电机(以下简称SPMSM)的特点是永磁体均匀贴在转子表面,主要由定子、转子、永磁体和定子绕组组成,如图2 所示。

图1 PMSM 伺服控制系统

图2 SPMSM 结构
1.1 PMSM 物理模型
为了便于控制器设计,通常在dq 同步旋转坐标系对电机进行建模分析,将d 轴与转子永磁体磁链方向对齐。电机稳态运行时电压、电流和磁链等矢量关系如图3 所示。
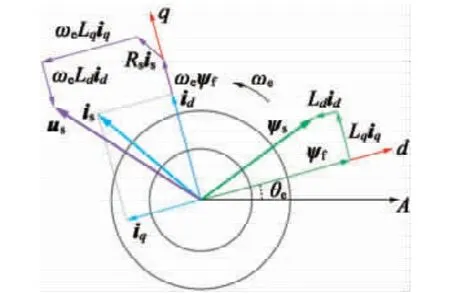
图3 电机矢量图
由图3 可以分析得到电机的等效物理模型,如图4 所示。
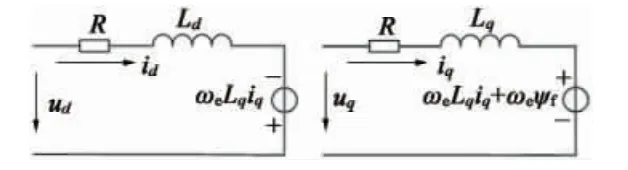
图4 dq 坐标系电机等效物理模型
在dq 坐标系下,PMSM 的定子电压方程:

式中:ud和uq为dq 轴定子电压;R 为定子电阻;Ld,Lq分别为dq 轴定子电感;ωe为电机转子电角速度;ψf为转子永磁体磁链。
1.2 电机定子电流估算原理
将式(1)转换为拉普拉斯域表示,可以得到dq旋转坐标系下电流和定子电压及转速的关系式:

对式(2)离散化可得到电流表达式:

1.3 电流环设计
完整的无电流传感器电机伺服控制系统结构如图5 所示,采用位置、速度、电流三环控制结构,其中电流环的反馈量采用式(3)迭代估算出的电流值。
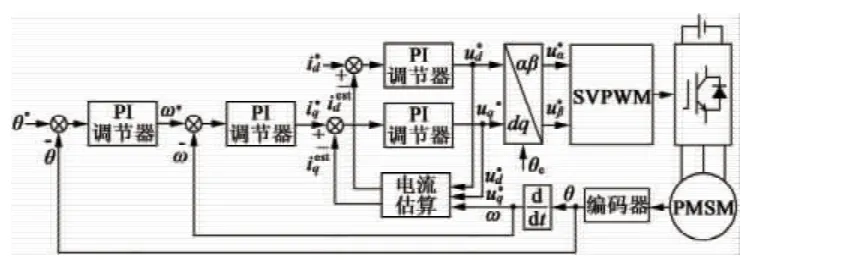
图5 无电流传感器电机伺服控制系统结构图
下文控制器参数设计、仿真和实验所用SPMSM参数如表1 所示。各控制环频率如表2 所示。
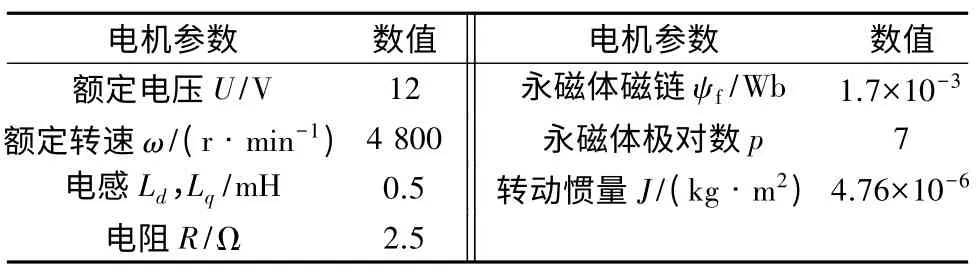
表1 SPMSM 参数

表2 控制环频率
电流环控制结构如图6 所示。图6 中:Gpc(s)=Kpc+ Kic/s 是电流环控制器;是PWM 更新和零阶保持器的等效延时,Tc为电流环控制周期;Gpwm是逆变器的等效放大倍数,采用SVPWM 调制方式时Udc为直流母线电压,在本文伺服控制系统中为12 V;在控制系统中引入系数1/Gpwm来抵消逆变器对传递函数的影响;GM(s)= 1/(R+Ls)为电机模型,是从定子电压到定子电流的传递函数。

图6 电流环控制框图
对电机采用如图7 所示的解耦控制方法,可得到解耦后的电机定子电压方程的小信号模型式(4),从而得到解耦后的电机模型:

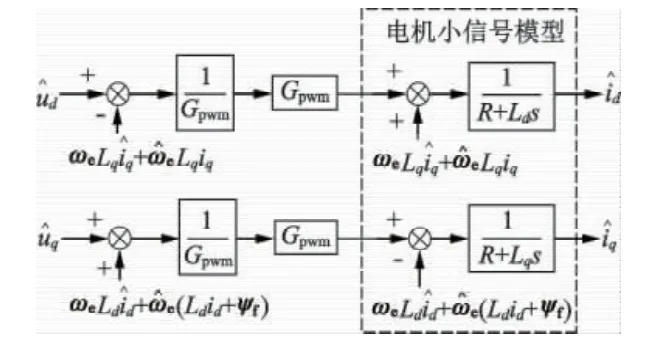
图7 dq 轴解耦
电流环的开环传递函数如下:

其主导极点为s=-R/Lq,首先通过配置Kic/Kpc=R/Lq,使得控制器零点与主导极点对消,提高系统响应速度。
设置电流环穿越频率为开关频率的1/20,即1 kHz,令ωcc=2π/(20Tc),其中Tc为电流环控制周期。
由电流开环幅频函数可计算得到Kpc和Kic的值:

代入相关参数,计算可得Kpc=3.4,Kic=1.7×104。
此时电流开环的Bode 图如图8 所示,系统的幅值裕量364 dB,相位裕量65.2°,说明系统具有良好的稳定性。电流闭环的Bode 图如图9 所示,增益为-3 dB 的频率约为1.4 kHz,相位偏移-45°的频率约为776 Hz,说明系统带宽基本满足设计要求。
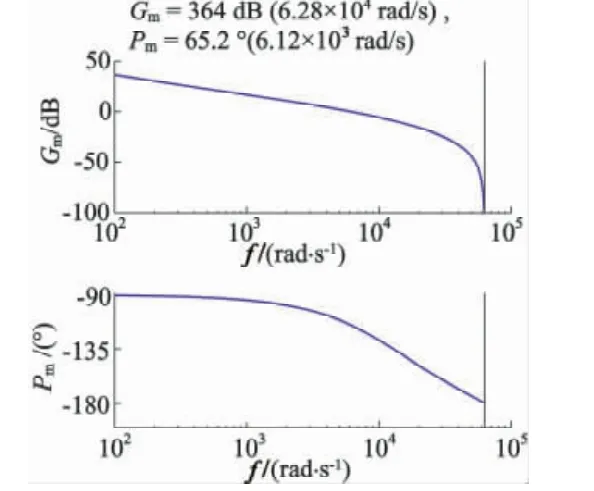
图8 电流开环传递函数Bode 图
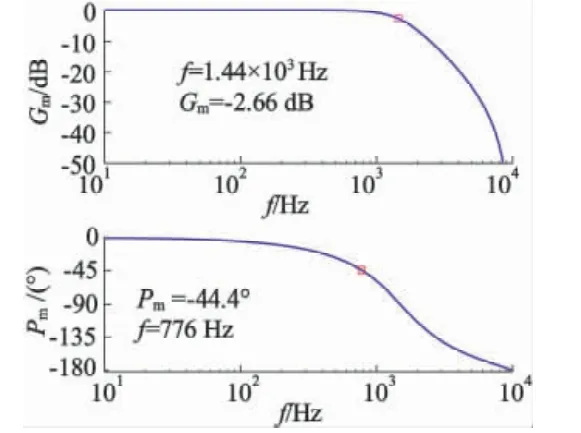
图9 电流闭环传递函数Bode 图
1.4 转速环设计
转速环控制结构如图10 所示。
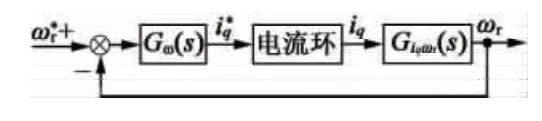
图10 转速环控制框图
图10 中:电流内环带宽远大于转速环,其传递函数简化为1;Gω(s)=Kpω+ Kiω/s 是转速环控制器;Giqωr=3pψf/(2Js)为从电流iq到转速ωr的传递函数。由电机运动方程小信号模型可以得到:
转速环的开环传递函数:

设置转速环的穿越频率为控制频率的1/20,即100 Hz,相位裕量70°,令ωcω= 2π/(20Tω),φω=70°,其中Tω为转速环控制周期。由转速环的开环幅频函数和相频函数可计算得出Kpω和Kiω:

代入参数计算可得Kpω=0.157,Kiω=36。
此时,转速环的闭环Bode 图如图11 所示,增益为-3 dB 的频率约为123 Hz,相位偏移-45°的频率约为77 Hz,说明系统带宽基本满足设计要求。
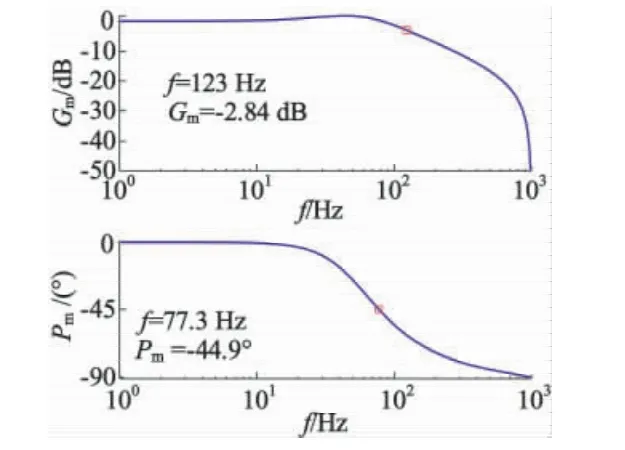
图11 转速闭环传递函数bode 图
1.5 位置环设计
位置环控制结构如图12 所示。图12 中:转速环带宽远大于位置环,其传递函数简化为1,Gp(s)=Kpp,Gωp(s)= 1/s 是从转速ω 到角度位置θ 的传递函数,为积分环节。

图12 位置环控制框图
位置环的开环传递函数为:

设置位置环的穿越频率为控制频率的1/20,即10 Hz,令ωcp=2π/(20Tp),其中Tp为位置环控制周期。由位置环开环幅频函数式:

代入数值,可计算得到位置环控制器参数Kpp=62.8。
此时,位置环的闭环Bode 图如图13 所示,增益为-3 dB 的频率约为10 Hz,相位偏移-45°的频率约为10 Hz,说明系统带宽满足设计要求。

图13 位置闭环传递函数Bode 图
2 仿 真
依据图5,在MATLAB 中搭建SPMSM 伺服控制系统仿真模型,采用前文设计的控制器参数,进行仿真验证,电机参数如表1 所示。d 轴电流阶跃响应如图14 所示,仿真结果表明,估算电流iestd基本和实际电流id相同,证明了前文所设计的电流迭代方程能够有效地估算实时电流。系统响应速度约为1 ms,符合系统设计带宽1 kHz。

图14 d 轴电流阶跃响应仿真
空载下对电机进行转速环和位置环的仿真验证。转速阶跃响应如图15 所示,响应速度约为10 ms,符合系统设计带宽100 Hz。位置阶跃响应如图16 所示,响应速度约为0.1 s,符合系统设计带宽10 Hz。
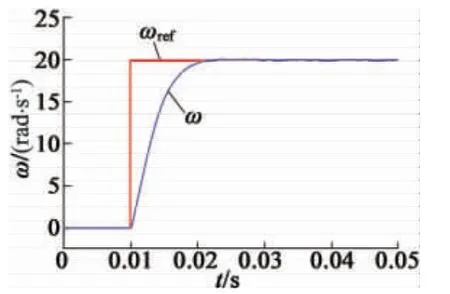
图15 转速阶跃响应仿真
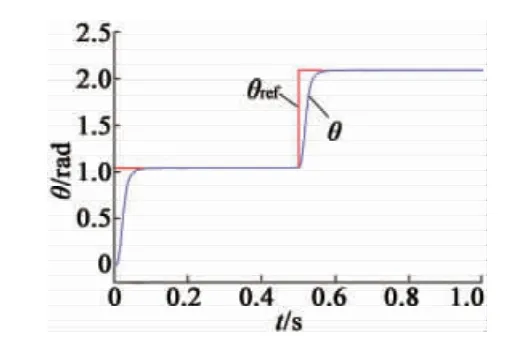
图16 位置阶跃响应仿真
3 实 验
为了进一步验证方案的可行性,搭建了实验平台,主电路使用电压源型逆变器,系统拓扑结构如图17 所示。
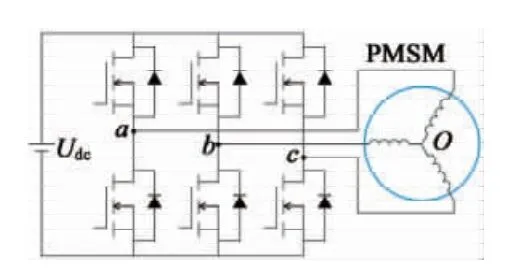
图17 三相电压源型逆变器PMSM 系统电路拓扑
实验平台主要由控制芯片GD32F103、角度传感器MA730 和电机驱动芯片MP6536 组成,开关频率为20 kHz。为了验证前文设计的无电流传感器电机伺服控制系统的有效性,我们在一个额定电压12 V 的云台电机上进行了位置伺服控制实验,该云台电机是SPMSM,参数如表1 所示。对于实验中参考值、电流值和位置角度等信息的记录,我们在实验时将数据存储在控制芯片的flash 中,待实验完成后将结果录入MATLAB 显示。
3.1 电流阶跃响应实验
为了检验估算电流法的电流控制效果,我们在验证平台控制板上安装有电流传感器,能够在实验过程中测得电机的实际电流,用来和估算值对比。设计了d 轴电流阶跃响应实验,具体操作是:在电机静止时,只给定d 轴电流参考值,利用估算电流作为反馈,同时观察估算电流值和实测电流值。实验结果如图18 所示,估算电流值iestd 和实际电流值id基本一致,无明显差异,响应时间约为1 ms,和仿真相符,表明估算电流方案能够较好地模拟真实电流值,实现电流环控制。
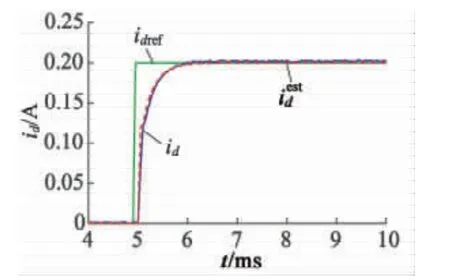
图18 d 轴电流阶跃响应实验
3.2 位置阶跃响应实验
根据云台电机实际工作场景的特点,我们设计了位置阶跃响应实验,电机初始处在静止状态,在5 s内连续给定几个位置参考值,依次间隔60°,观察电机响应情况,能否满足位置精度要求。实验结果如图19 所示,位置响应时间约为0.1 s,无超调,无静差,满足位置响应要求。
3.3 正弦轨迹位置跟踪实验
云台电机在实际应用中还需要有一定的动态响应能力,能够实现连续位置的跟踪。设计了轨迹跟踪实验来检测电机动态位置响应能力,具体操作方法是:给定一个0.5 Hz 的正弦位置参考值,观察电机动态响应。实验结果如图20 所示,电机能够正常跟踪正弦轨迹,没有出现幅值衰减,可以满足云台电机的动态响应要求。
4 结 语
本文设计了一种无电流传感器电机伺服控制系统,通过电机定子电压方程完成定子电流的实时估算,基于估算电流法实现了PMSM 的伺服控制,对位置环、转速环和电流环分别进行了建模和控制器参数设计,利用Bode 图分析了系统的带宽,通过仿真验证了控制器参数的有效性。在PMSM 实验平台上进行了位置阶跃响应实验和动态轨迹跟踪实验,实验结果表明了本文的控制系统在不使用电流传感器的情况下,能够有效地实现位置伺服控制,满足云台电机使用的性能要求。
