无人机三维空地信道模型的空间特性研究
2020-03-05张治熊天波陈建侨马楠
张治,熊天波,陈建侨,马楠,2
(1.北京邮电大学信息与通信工程学院,北京 100876;2.中国电子科技集团公司数据链技术重点实验室,陕西 西安 710068)
1 引言
近年来,无人机(UAV,unmanned aerial vehicle)由于其高机动性和高灵活性在民用领域得到了广泛应用,典型应用有天气监测、森林火灾探测、交通控制、货物运输、紧急搜救、通信中继等。使用UAV实现高速无线通信将有希望在未来的通信系统中发挥重要作用,例如,为不在基础设施覆盖范围内的设备提供高质量通信解决方案。与地面通信或基于高空平台的通信方式相比,包含低空无人机的无线系统通常能够更快地部署、更灵活地进行重新配置[1]。
根据UAV 空地信道特性建立精确的无线信道统计模型,对于设计适用于UAV 空地通信的信号处理技术与通信系统至关重要。但因为应用场景不同,UAV 空地信道特性与传统的航空空地信道有很大不同。航空空地通信的地面站点通常位于开阔区域的高塔,周围环境较简单;而UAV 空地通信场景复杂多变,导致相应地面站点周围的环境更加复杂[2]。因此,需要进行针对性的深入研究。文献[3]对已有的UAV 空地通信信道模型在信道带宽和工作频率范围方面进行了较全面的分析,对建立UAV空地信道模型有一定指导作用。文献[4-5]对UAV空地信道进行了测量并分析了信道特性,但缺少信道建模的工作,无法应用于其他UAV 空地场景中。文献[6-7]分别采用射线追踪法和时域有限差分方法对UAV 空地信道进行了确定性建模,精确度高但复杂度也较高,并且只适用于特定环境,不具有通用性。文献[8-10]分别对水上、山区和郊区3 种环境下的空地信道特性进行了测量,建立了相应的抽头延时线(TDL,tapped delay line)统计信道模型,具有较低的复杂性和较高的准确度,并且可通过调整相应统计参数推广到各种场景中。但是TDL 统计信道模型主要研究信道的时频特性,并不能反映信道的空间几何关系,因此在需要考虑UAV相对高度、移动轨迹等影响因素的场景中应用受限。
为了更好地满足UAV 空地通信系统设计及性能评估的需求,对其信道空间特性的研究得到了日益广泛的关注。基于几何的统计信道模型(GBSM,geometry-based stochastic model)假设散射体随机分布在一定的几何形状中,利用简化的射线追踪规则来表征无线信道,可以对信道的空间特性进行很好的刻画,因此适合对UAV 空地信道建模。文献[11-14]分别建立了UAV 空地信道的三维几何统计信道模型。特别是文献[12]充分考虑了一般的空地通信场景下地面站位置较低、有效散射体集中于地面站周围的情况,认为采用圆柱体限制地面站周围散射体的分布区域能更好地刻画有效散射体的分布,从而提出了基于单跳圆柱散射体的三维空地信道模型。该模型的出发点包括以下几方面。1)对于空中端,通常其位置较高,周围散射体较稀疏;而对于地面站,其周围被散射体包围,散射环境更复杂。2)地面站周围的有效散射体一般具有一定的空间区域分布,即在水平方向和垂直方向上的分布区域通常有一定的限制,该限制比较适合通过抽象的圆柱体几何模型进行刻画。3)圆柱体是三维立体图形,可以同时刻画水平角和(垂直)俯仰角的分布特性。4)对于空地信道而言,空中端通常位于高处,导致信号到达地面站时与地面有一定的夹角,采用圆柱体更能突出其中俯仰角的分布。然而,上述研究并没有完全从几何模型出发对信号到达地面站时对应散射区域的空间特征进行精细分析,也没有推导相应的信号到达角(可细分为水平角和俯仰角)分布函数,而只是较理想地采用冯·米塞斯(von Mises)函数和余弦函数分别对水平角和俯仰角进行描述;同时未能详细分析空中端信号出射角的分布特征。这些不足导致所建立的模型仍不够准确。
受上述问题的启发,本文提出了一种基于圆柱散射体的UAV 三维空地信道模型。与文献[12]假设地面站周围的散射体仅位于圆柱体表面不同,本文模型更合理地假设了散射体可分布于圆柱体表面和圆柱体内,从而使信号到达和出射各自具有了不同的散射区域分布,与实际场景更贴近。基于此,详细分析了信号到达角和出射角对应散射区域的空间几何特征,进而通过推导得到到达角和出射角分布的概率密度函数(PDF,probability density function),实现了对UAV 空地信道空间统计特性更加准确的刻画。由于上述角度分布概率密度函数可用于确定形状因子,如角度扩展、角度收缩和最大衰落方向等,而形状因子可进一步用于获得二阶统计量,如电平交叉速率、平均衰落持续时间、空间相关性和相干距离等[15],因此,基于本文所提出的信道模型,能够为UAV 空地通信系统设计与性能评估提供有效的帮助。
2 系统模型
本文采用了与文献[12]所提模型类似的单跳圆柱散射体三维空地信道模型。如图1 所示,空中端(AS,air station)和地面站(MS,mobile station)的高度分别为Ha和Hm,AS 和MS 之间的水平距离为D。通常AS 的高度要高于屋顶高度,因此假设AS周围没有散射体;而MS 处于地面附近,其周围有大量散射体如房屋、树木等,因此将MS 周围的散射区域建模为一个圆柱体,并设圆柱体的高度H等于其周围建筑的平均高度,横截面的半径为R。与文献[12]假设地面站周围的散射体仅位于圆柱体表面不同,本文模型假设散射体均匀分布在该圆柱体表面和圆柱体内。定义x-y平面为包含圆柱体下表面的水平面,xa-ya平面和xm-ym平面分别为以AS和MS 为原点的水平面,MS 在x-y平面的投影O1为下表面的圆心;选择AS 在x-y平面的投影为坐标系的原点O,连接O-O1为x轴,连接O与AS 为z轴。图1 中,假设AS 发出的信号经圆柱体的一点p的散射后到达MS,p在xa-ya平面和xm-ym平面上的投影分别为p1和p2,则出射的俯仰角和水平角分别为βa和φa,到达的俯仰角和水平角分别为βm和φm。
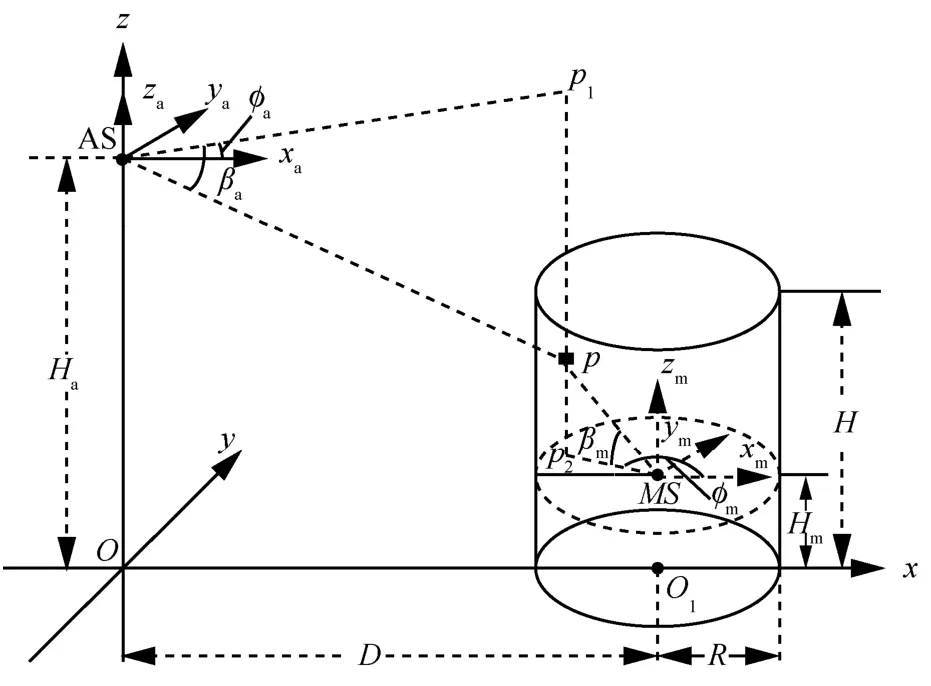
图1 空地三维信道模型
3 空间统计特性研究
3.1 地面接收端MS 到达俯仰角和水平角对应的散射区域的分布
从MS 端看,对于一个特定的到达俯仰角βm,对应的散射区域为以MS为顶点的圆锥体与圆柱相交的区域,如图2 的灰色空心区域所示。当俯仰角不同时,该圆锥体将与圆柱体表面相交于上表面P1,m、下表面P2,m或侧面P3,m。因此,可将俯仰角βm划分为3个取值范围:对应相交于P1,m的情况,对应相交于P2,m的情况,-β2<βm≤β1对应相交于P3,m的情况。设rm,min和rm,max分别表示散射区域内最近散射体和最远散射体到MS 端的距离。对于MS 端来说,由于其为散射区域的顶点,故rm,min恒为0,而rm,max在上述3 个区域内可分别表示为

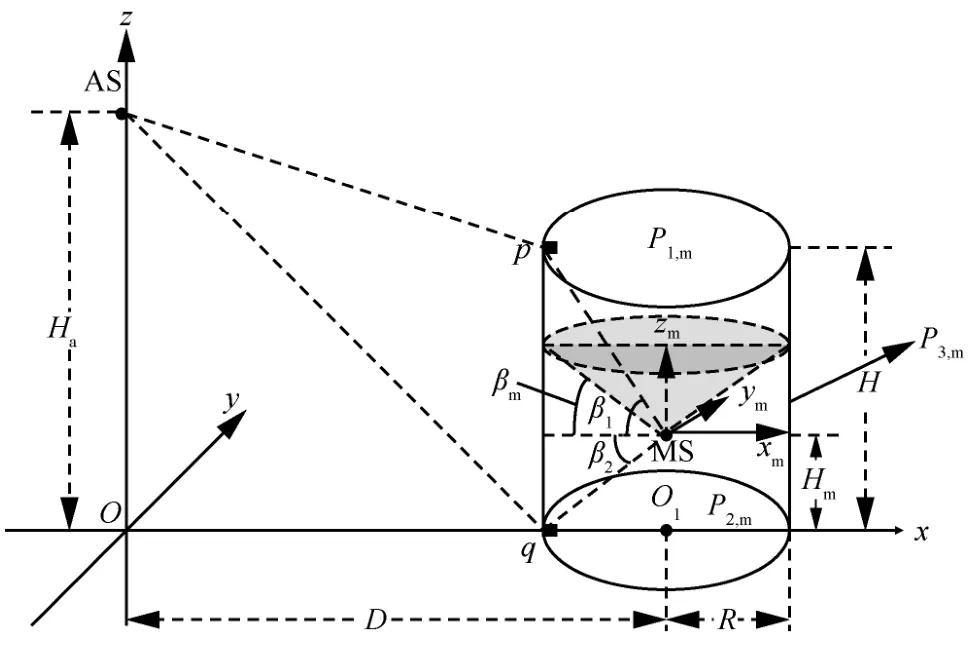
图2 地面站MS 端特定俯仰角βm对应的散射区域及不同俯仰角区域的划分
另一方面,从MS 端看,对于任意的一个到达水平角φm,对应的散射区域都是如图3 所示的灰色长方形区域,可知φm为均匀分布,故不再对其散射区域进行分析。

图3 地面站MS 端特定水平角φm对应的散射区域
3.2 空中发送端AS 出射俯仰角和水平角对应的散射区域的分布
从AS 端看,对于一个特定的出射水平角φa,其散射区域应为如图4 所示的灰色矩形abcd。设该矩形与圆柱体上下表面相交的4 个边界点d、a、c、b对应的俯仰角度分别为β3、β4、β5、β6,可依据式(2)~式(5)进行计算。

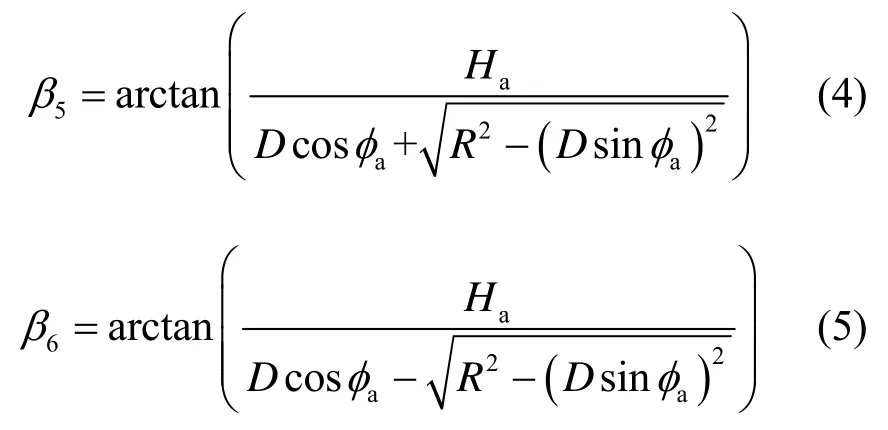

图4 空中AS 端特定水平角φa对应的散射区域及相应的临界俯仰角
另一方面,从AS 端看,其出射俯仰角βa将分布在如图5 所示的-β10到-β7之间,其中,β7、β8对应的散射区域与圆柱上表面分别交于点f、e;β9、β10对应的散射区域与圆柱下表面分别交于点g、h。下面进行详细分析。

图5 空中AS 端俯仰角βa位于-β8到-β7之间时对应的散射区域
当βa处于-β8到-β7之间时,对于一个特定的俯仰角,散射区域与圆柱的上表面相交于以O2为圆心(O2对应Z轴上高度为H的点)的圆弧mn,散射区域最下端与圆柱的侧面交于点i。若采用2α1表示圆弧mn对应的圆心角,则α1为

设β11对应于O2g1相切于圆柱上表面时对应的俯仰角,其中g1为切点,则其值可表示为

这样,-β8到-β7之间的俯仰角可分为两部分:当βa处于-β11到-β7之间时,散射区域对应的水平角φa在-α1到α1之间;当βa处于-β8到-β11之间时,散射区域对应的水平角φa在-α到α之间,其中表示O2g1与O2O3的夹角(O3为上表面圆心)。
如图6 所示,当βa处于-β9到-β8之间时,对于一个特定的俯仰角,散射区域最上端与圆柱侧面相交于点k,最下面与圆柱的侧面交于点l,散射区域为两点之间的灰色曲面,此时散射区域对应的水平角φa在-α到α之间。

图6 空中AS 端俯仰角βa位于-β9到-β8之间时对应的散射区域
如图7 所示,当βa处于-β10到-β9之间时,对于一个特定的俯仰角,散射区域与圆柱的下表面相交于圆弧pq,散射区域最上端与圆柱的侧面交于点j。若采用2α2表示圆弧pq对应于圆心O的圆心角,则α2为

设β12对应于Og2相切于圆柱下表面时对应的俯仰角,其中g2为切点,其值可表示为

同样,-β10到-β9之间的俯仰角可分为两部分:当βa处于-β10到-β12之间时,散射区域对应的水平角φa在-α2到α2之间;而当βa处于-β12到-β9之间时,散射区域对应的水平角φa在-α到α之间,α值同上。
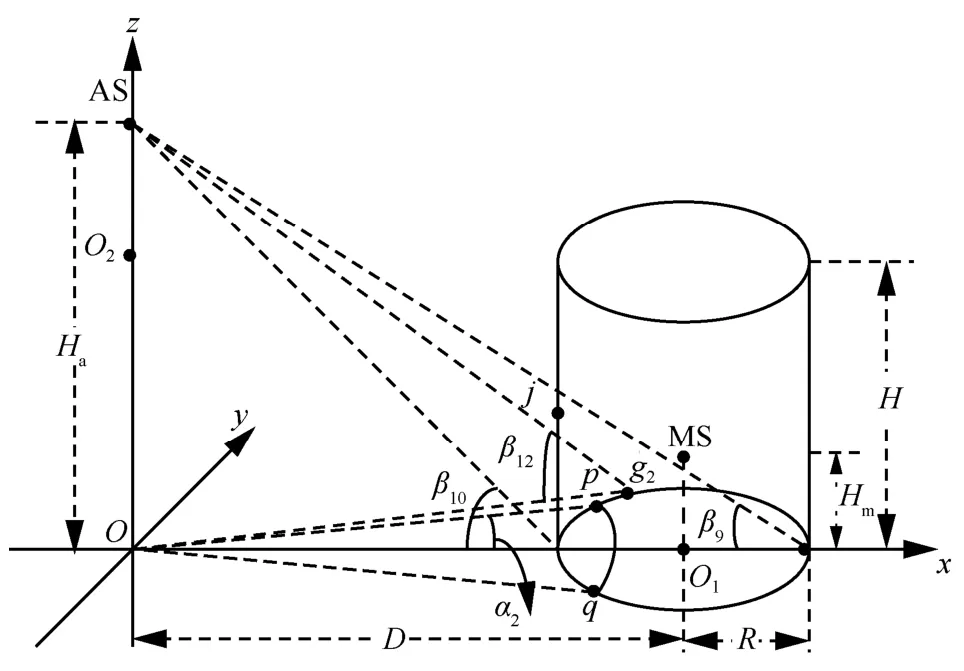
图7 空中AS 端俯仰角βa位于-β10到-β9之间时对应的散射区域
基于以上分析,从AS 端看散射区域总体可划分为三部分:P1,a、P2,a和P3,a,定义如下。

设ra,min和ra,max分别表示散射区域内最近散射体和最远散射体到AS 端的距离,则上述3 个散射区域P1,a、P2,a和P3,a对应的ra,min和ra,max的值分别为

3.3 地面接收端MS 到达角的概率密度分布
下面基于前文的空间特性分析推导各角度分布的概率密度函数。参考文献[16],MS 端的俯仰角βm、水平角φm和散射体到MS 端的距离rm的联合概率分布p(rm,φm,βm)可由式(15)得到。

式(15)中的J(xm,ym,zm)可表示为[16]

由于散射体在定义的体积为V的圆柱散射体区域内均匀分布,因此有

将式(16)和式(17)代入式(15)中,并对rm进行积分,可得到φm和βm的联合概率分布函数为

将式(1)中不同俯仰角βm对应的rm,max代入式(18)中,并对φm进行积分,可得到βm的概率密度函数为
由于水平角φm满足均匀分布,其概率密度函数为

3.4 空中发送端AS 出射角的概率密度分布
AS 端的俯仰角βa、水平角φa和散射体到AS端的距离ra的联合概率分布p(ra,φa,βa)可由式(21)得到[16]。
在式(21)中对ra进行积分,可得到φa和βa的联合概率分布函数为

由前面的分析可知,水平角φa对应的散射区域可分为3 个区域,因此在式(22)中对βa分区域积分可得到φa的边缘概率密度函数为

其中,φa范围为-α~α。
俯仰角βa对应的散射区域划分与βa的取值有关,因此可根据不同的散射区域分别在式(22)中对φa积分以得到βa的边缘概率密度函数。当βa处于-β8到-β11之间时,其边缘概率密度函数为

当βa处于-β11到-β7之间时,其边缘概率密度函数为

当βa处于-β9到-β8之间时,其边缘概率密度函数为

当βa处于-β12到-β9之间时,其边缘概率密度函数为

当βa处于-β10到-β12之间时,其边缘概率密度函数为

4 仿真结果及分析
4.1 地面接收端MS 到达角的仿真分析
地面站MS 的到达俯仰角βm在不同的散射圆柱体高度H、MS 的高度Hm和圆柱体底面半径R下的概率密度曲线如图8 所示。空中发送端到达地面接收端的信号是多径的,即有直达波,也有经地面散射体或位于圆柱体表面及内部散射体反射到达接收端的反射波。这一特点在概率密度曲线图中表现为概率密度曲线是不对称的,明显分为三段,分别对应于散射区域与圆柱体表面相交于下底面、侧面和上表面3 种情况。第一段随着βm的增大而增大,第二段随着βm的增大先减小后增大,第三段随着βm的增大而减小,三段曲线的变化趋势都与相应βm对应的散射区域大小随βm的变化相符。作为参考,图8 中同时给出了传统UAV 空地信道几何建模,刻画到达俯仰角分布概率密度的理想余弦(ideal cosine)PDF。可以明显看到,传统的分布函数不具有分段特征,无法描述散射体位于圆柱体不同位置的情况;相对而言,本文所得地面站MS的到达俯仰角βm的概率密度分布具有明显的分段性质,从而能更准确地刻画UAV 空地信道的到达角分布。

图8 不同参数设置下MS 端俯仰角βm的概率密度函数
从图8 中可以看出,当增大圆柱体的高度H时,曲线2 的前两段的值变小,这是由圆柱体的体积变大导致的。当增大MS 高度Hm时,曲线3 第一段值变大,第三段的值变小,这是由于第一段和第三段的值分别正相关于Hm和H-Hm,而第二段的值与Hm无关,因此曲线1 和曲线3 的第二段部分重合。当增大圆柱体的地面半径R时,曲线4 第一段和第三段的值变小,这是由圆柱体的体积变大导致的,由于第二段的值正比于R,因此第二段的值变大。
由于地面站MS 的到达水平角φm为均匀分布,本文不再进行分析。
4.2 空中发送端AS 出射角的仿真分析
空中AS 端的出射水平角φa在不同的圆柱体底面半径R、AS 和MS 之间水平距离D下的概率密度曲线如图9 所示。从图9 中可以看到,概率密度曲线是对称的,这是由圆柱散射体在水平方向上的对称性所决定的。同时可以看到,曲线2 和曲线3互相重合,表明当一致时,φa的概率密度分布一致;曲线2 和曲线3 的取值范围大于曲线1,表明越大,φa的取值范围越大。

图9 不同参数设置下AS 端水平角φa的概率密度函数
空中AS 端的出射俯仰角βa在不同的圆柱体底面半径R、AS 和MS 之间水平距离D和AS 端高度Ha下的概率密度曲线如图10 所示。
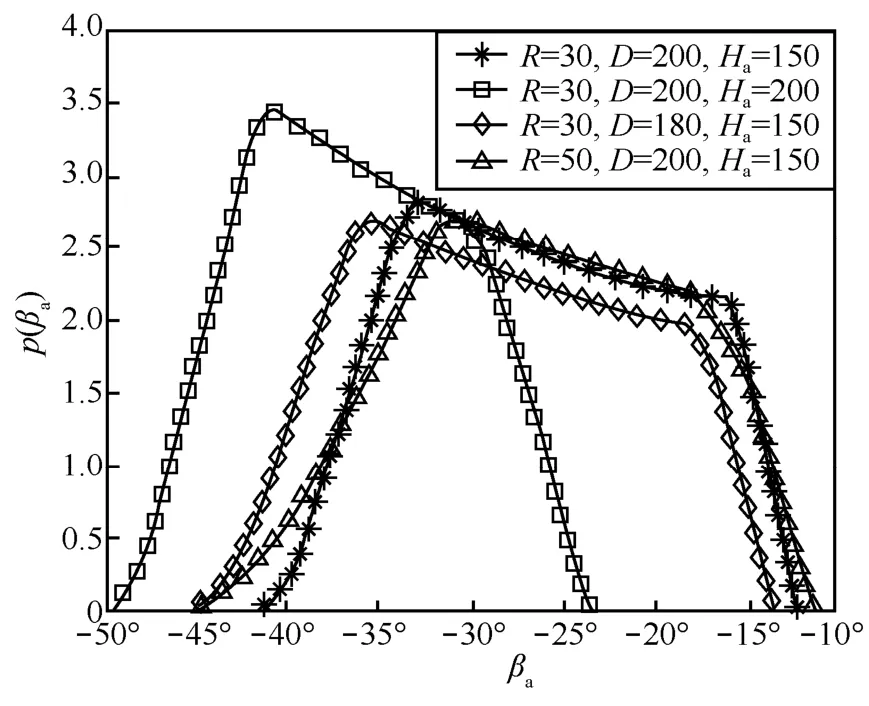
图10 不同参数设置下AS 端俯仰角βa的概率密度函数
从图10 中可以看到,与到达地面站MS 的俯仰角类似,所得到的空中端AS 的出射俯仰角βa的概率密度曲线也分为三段,分别对应于3 种不同类型的散射区域P1,a、P2,a和P3,a,概率密度曲线的趋势变化与散射区域的大小变化相符,从而准确反映出圆柱散射体的空间几何特征。当增大AS 端高度Ha时,俯仰角βa的分布范围变小并且左移,相应地,概率密度曲线的值会变大;当增大圆柱体底面半径R或减小AS和MS 之间水平距离D时,俯仰角βa的分布范围变大,相应地,概率密度曲线的值会略微变小。
5 结束语
本文面向无人机空地通信,针对现有几何信道建模对角度分布假设过于理想、无法准确描述空间统计特性的问题,提出了一种基于圆柱散射体的UAV 三维空地信道模型。与传统模型不同,该模型更合理地假设了散射体可分布于圆柱体表面和圆柱体内,从而使信号到达和出射各自具有不同的散射区域分布,与实际场景更贴近。进而详细分析了信号到达角和出射角对应散射区域的空间几何特征,推导得到了角度分布的概率密度函数。仿真结果表明,所提分析方法及推导的概率密度函数能够准确反映该类信道模型的参数变化,从而能够准确刻画UAV 空地信道到达角和出射角的分布。由于角度分布概率密度函数在UAV 空地信道空间特性分析中具有重要作用,因此本文成果将为相关信道的准确建模提供有力支撑。
