一种二次航管雷达伺服控制系统设计
2020-03-04董巍,李丽,吴曦
董 巍,李 丽,吴 曦
(海军参谋部指挥保障大队航空管制室,北京 100841)
0 引言
航管二次雷达也称为航空交通管制雷达信标系统,通过地面站和目标应答器之间的询问和应答,实现对目标的跟踪。地面接收到的的回波信号包括目标距离、方位和气压高度信息,同时还能识别军用和民用目标。航管二次雷达帮助管制员或者系统操作员在屏幕上跟踪和询问飞行器目标,从而提高了管制效率。现有的航管二次雷达数据量较大,导致其处理周期较长,同时由于地面指挥站的综合显示系统的显控功能不够精确,一旦将二次雷达数据直接显示到综合显示系统上,会导致视场中同时显示的飞行器目标过多,影响操作人员的操作。
近些年来,随着我国对航空也的需求日渐增加,民航系统引进和建设的地面雷达监视导航系统也不断增多,同时也对长时间的无故障工作有了更高的要求。如何提高我国空管雷达有效、高速、数字化的高性能检测和保障,也成了摆在管理部分的一个急需解决的问题。长期以来,通过专业仪器对航管雷达进行检测和维护是一个标准的流程,但是也出现过程复杂、时间较长、精度可靠性不够高等方面的问题。因此,提高航管二次雷达控制系统的准确性、可靠性、安全性和可维护性具有十分重要的意义。
1 方案设计
车载雷达转台系统的主要任务是接收外部数据引导,精确指向并随动跟踪目标,并将高功率微波通过天线辐射至目标处,同时实时反馈天线的指向角度和状态信息。天线伺服系统具备自动展开、收装能力和运输时的锁紧机构,整个系统与方舱装载于同一载车平台上,满足三级公路运输要求。系统安装于方舱之上,并确保公路运输不超限。转台由方位和俯仰机构组成,带动天线实现方位与俯仰两方向动作,方舱内部设计有伺服控制箱,既可以减少伺服系统的负载,又有利于伺服控制板的防护;在转台上是天线主面、天线副面和波束波导,天线主面、天线副面联接于天线转台的俯仰机构的背架上,通过转台背架的转动来实现天线俯仰动作,并能够实现天线分系统从工作状态到运输状态转换(或相反动作)。波束波导安装在俯仰平台上,俯仰通道通过联轴器带动波束波导转动,保证微波波束始终指向天线副面。
2 系统硬件
根据对转台的使用要求,制定的控制系统方案具有如下突出特点:
2.1 能提供高稳定高精度的方位数据
依据技术协议中的要求选择合适的编码器,编码器与天线的回转轴线同轴,增加编码器的机械安装精度,减少了编码器的角位移读数与真实角度位移之间的误差,提高了编码器校北误差的精度。
2.2 全位置反馈伺服控制
独立的校北功能,通过角位置反馈的三回路闭环控制方案,实现闭环控制。
2.3 CANOpen总线
内部通信采用CANOpen总线通信,具备实时性稳定性通信能力。
2.4 硬件接口
硬件接口根据技术要求预留,确保硬件接口的通用性以及多样性。
硬件组成部分如下:
编码器选用AMO(奥地利)16位增量式编码器。选用贝加莱的PLC实现通信、编码器数据接收、故障判断。PLC能完成控制系统间的故障监测、伺服驱动器的控制、IO总线端子的信号采集、传感器信息的接收、接收主机的命令并解析等相关功能。CANOpen主站模块X20IF1072能够实现和驱动器之间的CANOpen通信。
伺服驱动器完成对伺服电机的驱动控制,和传统的变频器不同,伺服驱动器内部集成了电流环、速度环和位置环,能实现对伺服电机闭环控制,实现精准、快速定位以及稳定的匀速运动。
编码器处理模块接收来自转台本体编码器的原始信号,生成规定要求的信号格式并返回给雷达主机。采用FPGA的处理方式,其主频为50MHz,同时具备RS232接口和PLC通讯,接收来自PLC的调零命令。
AC/DC电源输出24VDC弱电,给PLC、驱动器、开关、继电器控制等供电。
接触器用来控制控制系统的强电输入、伺服驱动器的强电输出。断路器则用在驱动器输入前端,用于在维修时断开故障控制系统的强电输入。
开关用来控制对接触器的控制及其他相关信号输入到驱动器中。包括急停开关、自锁开关、状态显示开关、声光报警开关等。
为了方便现场维修,控制面板需要提供安全保护操作功能和状态指示功能。
3 系统软件
软件应具有容错性设计,防止软件跑飞和进入死循环。应充分考虑接口的各种可能故障及软件运行时各种异常情况,设计相应的保护措施。计算导致的变量取值溢出和计算误差可能导致的异常。软件接口设计应具备扩展性,能快速适应功能和接口需求变更设计部署。
PLC接收来自主机的工作命令,同时接收来自两路伺服驱动器的工作状态,通过对工作命令和工作状态的综合判断后,对两路伺服驱动器发出工作指令,同时将控制系统的状态返回给主机。
主机和控制系统间采用以太网通信,通信协议采用TCP/IP,每次通讯的最低间隔为1s。
工作模式为PLC内部控制伺服驱动器的三种工作状态:待机、正常运行、故障停机,其状态转换如图1所示。
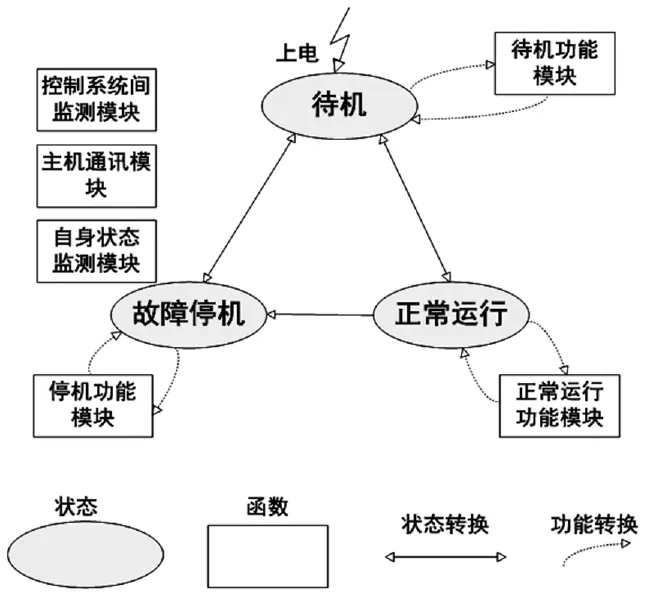
图1 单路控制系统状态转换图
自检采用内部周期自检的方式实现,自检周期为10ms,通过采集转台各部分的状态,由综合算法来判断是否有故障。
系统工作在系统自检状态时,离合器和转台是脱离的。系统自检时由PLC发出运动指令驱动电机进行正弦运动;并记录运动过程中轴角位置传感器检测的角位置信息;PLC根据这些信息诊断驱动元件、测量元件是否正常工作,并提供相应的自检结果。自检程序和流程图见图2。
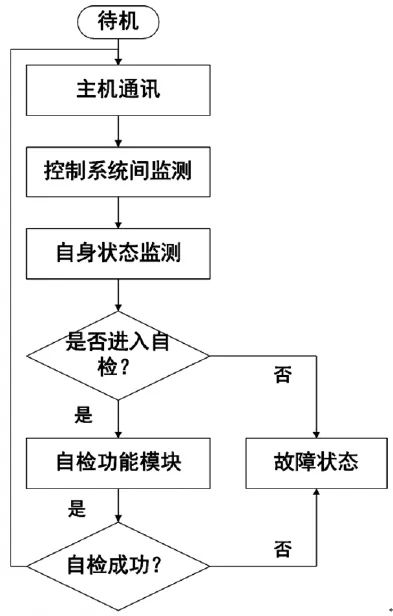
图2 自检程序流程图
PLC根据主机的命令控制驱动器进行校北。伺服驱动器根据位置闭环命令和位置偏移量进行位置闭环工作,驱动转台定位到指定位置。图3给出了校北程序流程图。
由于位置定位用的是电机自身的旋变作为位置反馈,在离合器脱离的情况下和测角设备的相对位置是会发生变化的,因此在定位的过程中有可能出现一次定位不能满足主机要求的情况,可通过二次定位达到要求。
由雷达主机基于双机轮休工作的计划、设备检修等相关任务的考虑进行控制系统间正常切换,在切换过程中,为保证切换的平稳性,双伺服控制系统会进入同时工作状态。伺服控制系统正常切换的程序流程图如图4所示。
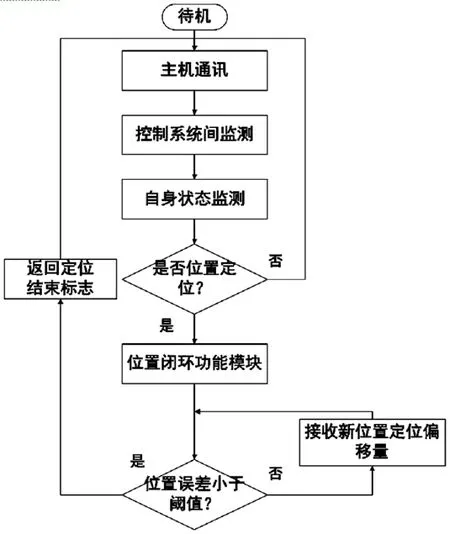
图3 位置定位程序流程图
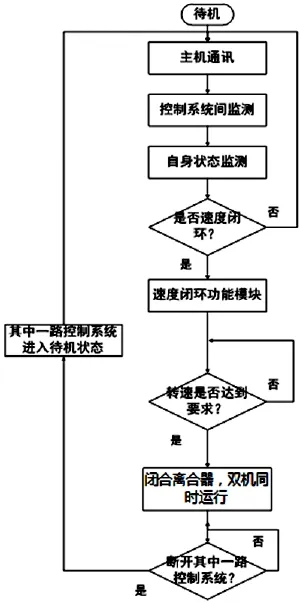
图4 控制系统正常切换程序流程图
在外部负载过大的情况下,电控系统需要双机同时工作,此时主机根据控制系统反馈的测量电流大小来判断当前工作控制系统的负荷运转情况,如果负荷较大,则不再断开之前正常工作的控制系统,让双控制系统同时工作。
PLC在转台单机驱动的过程中监控整个系统的状态。当运行转速闭环工作的单路伺服系统出现故障时,通过综合判断在保证安全的情况下,PLC应将故障伺服系统中的离合器断开,同时启动待机的伺服系统。故障切换时间由CANOpen总线和离合器等开关启停时间以及PLC的周期运算时间综合决定。故障切换程序流程图如图5所示。
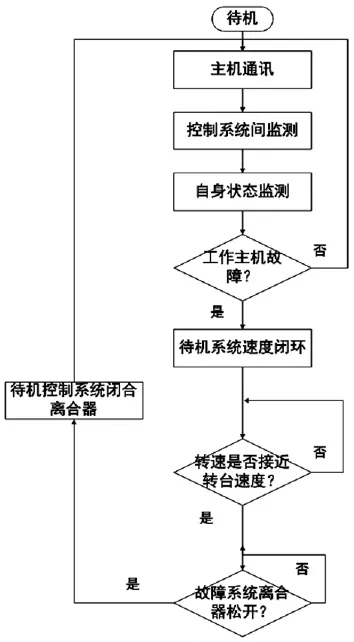
图5 故障切换程序流程图
在故障停机状态下,PLC断开驱动器输出,松开离合器,同时关闭驱动器的输出,并进行声光报警。故障出现后的程序流程图如图6所示。
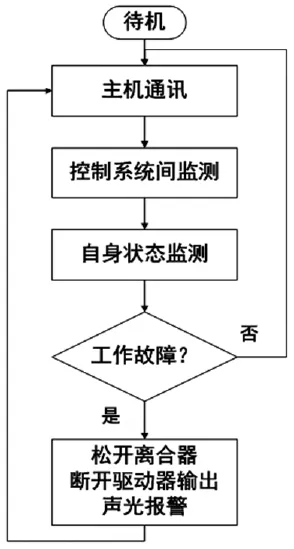
图6 故障停机的程序流程图
转台系统的安全保护控制主要包括:驱动系统的电源控制、各路驱动控制器的使能控制、紧急制动等。
PLC是实现逻辑控制的中枢核心。雷达主机通过网络接口给PLC发送控制指令,PLC根据雷达主机指令控制各伺服驱动器的工作,同时检测个回路的实时状态。同时PLC能够实现在异常情况下的紧急保护指令,各驱动器的状态数据,当用户按下紧急按键或驱动器发出故障信号时,PLC即刻发出急停指令给驱动器,通过电机制动和抱闸的方式将设备停止下来,为了能将能量快速释放,通过外接制动再生电阻帮助实现能量消释,以确保用户设备和转台的安全。
4 结束语
随着国家的空中交通的需求不断增加,对于航空管制的雷达的高效运行的要求也不断提高,除了通过引进和建设更为可靠的设备,通过现有设备的系统改进及提高也是一种比较好的方法。本文在现有航管雷达设备的基础上,设计了可靠性更高、操作更为简单的二次航管雷达伺服控制系统,提高航管二次雷达控制系统的准确性、可靠性和安全性。
