基于多传感器室内云定位技术研究
2020-03-04梁晓虎甘兴利
梁晓虎,甘兴利,张 衡,黄 璐
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
0 引言
随着物联网的发展和日益增长的信息服务需求,室内位置服务得到了人们的广泛关注,室内定位已成为国家“互联网+”战略和国际位置服务领域的研究热点,如何在室内错综复杂的环境中为大众提供智能的位置服务已经成为了业界亟待解决的问题[1]。由于室内定位误差理论和室内复杂环境作用机理等关键科学问题没有得到根本解决,室内定位的稳定性、连续性、可靠性和高精度仍是技术瓶颈,进而限制了室内位置服务的推广应用。近年来,导航信号精密测量技术、深度学习算法和大数据信息处理技术的发展为提升室内定位和位置服务性能提供了重要支撑[2-3]。
从普适性角度来看,基于智能手机的室内定位具有得天独厚的优势,可以作为室内定位技术的应用平台[4]。本文以智能手机的MEMS、WiFi、蓝牙和地磁等传感器为基础,在不增加用户(大众方、业主方)使用成本的前提下,实现基于深度学习的多传感器组合室内定位和位置服务,突破WiFi/蓝牙/地磁组合定位关键技术,实现室内优于3 m的定位精度[5-6]。
1 基于多传感器室内云定位原理
1.1 定位原理
多传感器室内云定位主要包括2个部分。第1部分利用智能终端中WiFi与地磁模块,获取数据,构建训练数据集,通过机器学习算法实现不同数据的融合,形成一种新的、特征更明显的指纹库,划分室内环境下的特征区域,实现定位功能,定位精度为2~3 m(房间级)[7-8];第2部分为微惯导与IBeacon耦合,实现室内连续定位[9-10]。多传感器室内云定位技术工作原理如图1所示。
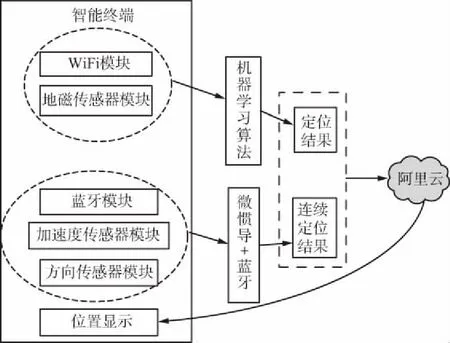
图1 多传感器室内云定位技术工作原理Fig.1 Working principle of multi-sensor indoor cloud positioning technology
当智能手机通过地磁/WiFi/蓝牙等多传感器基于深度学习实现指纹定位时,在离线阶段,使用智能定位终端各类传感器采集环境中不同参考点处的机会信号场强、地磁场强存储在内存卡上,将采集后的大量数据上传到服务器端(云端)。之所以采集多种类型的数据是为了保证数据的多样性,便于深度学习其特征,将数据归一化处理到[0,1]区间,作为深度学习网络的输入数据。
在离线训练阶段,深度训练输入数据的特征存储为指纹信息。与传统的KNN聚类方法不同,深度学习网络通过训练大量的输入数据得到不同位置的权重信息作为指纹,其有效地描述了不同位置的各种信号特征[11-13]。在线定位阶段,系统利用训练好的网络及各项参数计算出相应的位置坐标。定位原理如图2所示[8-10]。
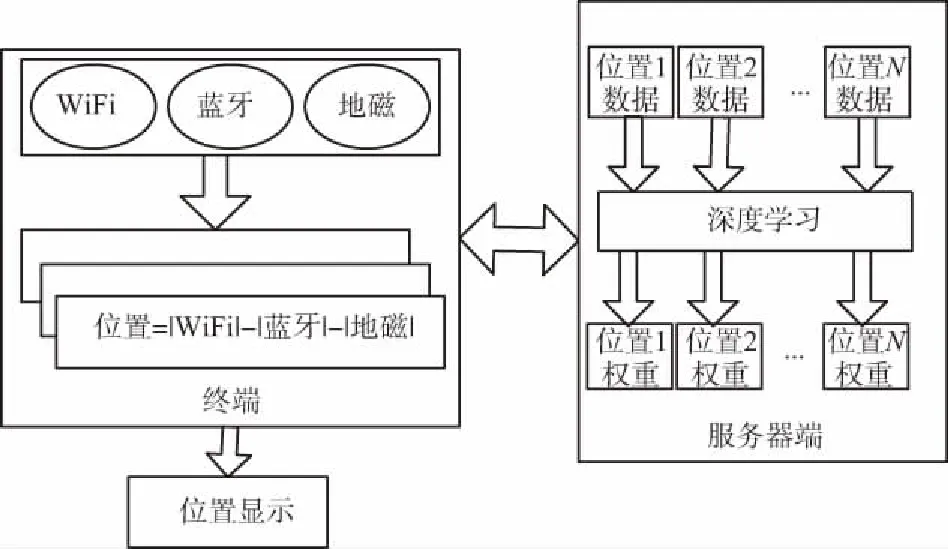
图2 传感器基于深度学习指纹定位原理Fig.2 Sensor based on deep learning fingerprint positioning schematic
1.2 深度学习指纹感知
采用深度置信网络DBN,整个DBN训练分为3个阶段:预训练、展开和微调。在预训练阶段,获得各个隐含层的权重矩阵,得到重构数据;在微调阶段,比较重构数据与输入数据v,以最小误差原则调整网络;在展开阶段,反向调整各个隐含层的权重矩阵;重复上述步骤,获取最优权重。基于深度学习指纹感知如图3所示。
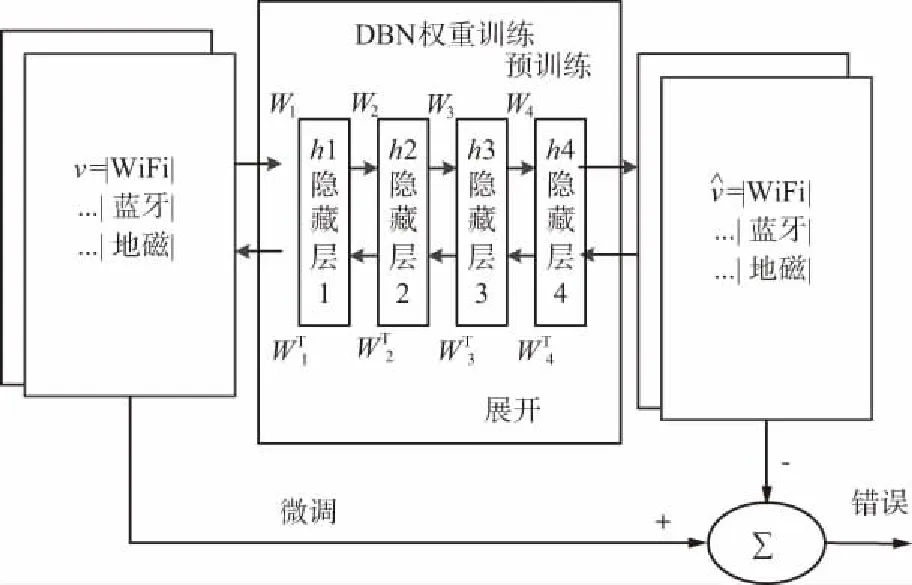
图3 基于深度学习指纹感知Fig.3 Fingerprint perception map based on deep learning
定义v为输入层,对终端采集的机会信号/地磁数据归一化的值;hi为第i层的隐单元,其中i为1,2,3,4,则:
Pr(v,h1,h2,h3,h4)=Pr(v/h1)Pr(h1/h2)Pr(h2/h3)Pr(h3/h4)。
由于DBN的节点相互独立,Pr(v/h1),Pr(h1/h2),Pr(h2/h3),Pr(h3/h4)可以看作是一个受限波尔兹曼机(RBM),表示为:


首先估计参数{b0,b1,W1}来模拟第1层RBM网络输入参数,然后固定第1层的参数{b0,W1},从条件概率Pr(h1|v)中获取样本来训练第2层RBM网络(即估计第2层参数{b1,b2,W2}),以此类推,最终使用这种贪婪训练法获得第4层RBM网络的参数{b3,b4,W4}。

式中,α为补偿。
1.3 网格化定位
使用传感器数据完成DBN网络的权值训练后,将权重与偏置信息作为深度指纹信息,用于实现更加稳定、精度更高的定位。在线定位阶段,将该DBN最顶层加入一个BP神经网络分类器,对室内1 m×1 m的网格进行分类。当智能手机将室内某一位置处采集的多传感器数据输入深度学习网络(DBN+BP),将输出该位置所在的网格编号[14-15]。具体流程图如图4所示。
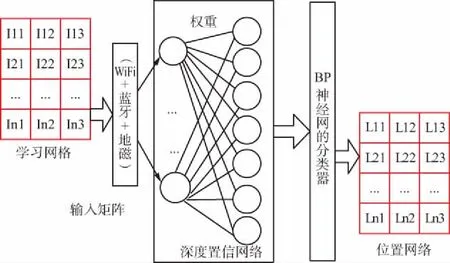
图4 网格化定位原理Fig.4 Grid positioning principle diagram
2 定位仿真
针对多传感器室内定位算法进行仿真,仿真结果如图5所示。
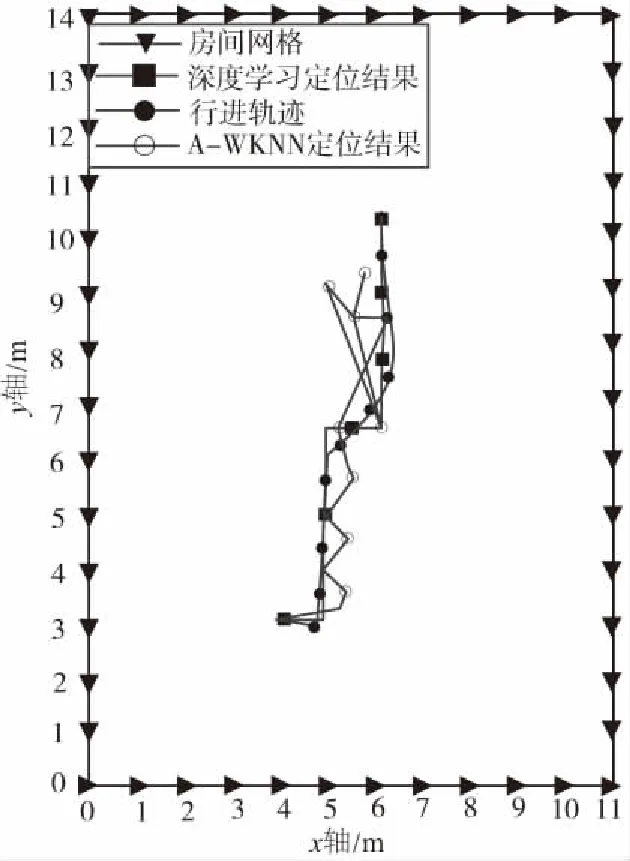
图5 基于深度学习和WKNN的定位稳定性Fig.5 Positioning stability based on deep learning and WKNN
深度学习室内定位算法和加权K近邻算法在不同路径下输出位置与真实位置比较结果,可以看出,深度学习室内定位算法提供非常稳定、连续提供智能手机的位置,而加权K近邻算法输出位置信息会发生较大跳变,稳定性和连续性较差。
图6为加权K近邻和深度学习2种算法的定位误差统计结果。多传感器的深度学习室内定位平均误差为0.92 m,最大定位误差为1.83 m,1 m内的误差置信区间达到90.3%;加权K近邻无线指纹定位算法平均定位误差为1.39 m,最大定位误差为3.6 m,1 m内的误差置信区间为42%,因此,可以看出多传感器的深度学习室内定位精度和稳定性远好于后者。
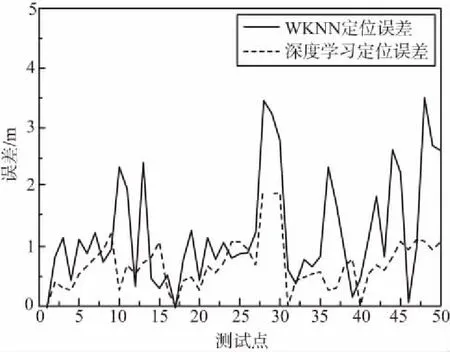
图6 WKNN和深度学习2种算法的定位误差Fig.6 WKNN and deep learning algorithm positioning error
3 实际测试结果
在卫星导航系统与装备技术国家重点实验室人工智能试验场进行了实际测试验证,测试场地放置有调试桌、设备机柜,测试场屋顶安装WiFi和蓝牙,场地面积共计100 m2。测试终端采用华为P20,内嵌自主开发的定位软件。
测试过程:
① 静态定位测试:测试人员手持测试终端在WiFi和蓝牙信号覆盖区域内进行静态测试,得到静态定位结果,测试结果如图7所示,通过测试结果可以得出,定位精度优于2 m。
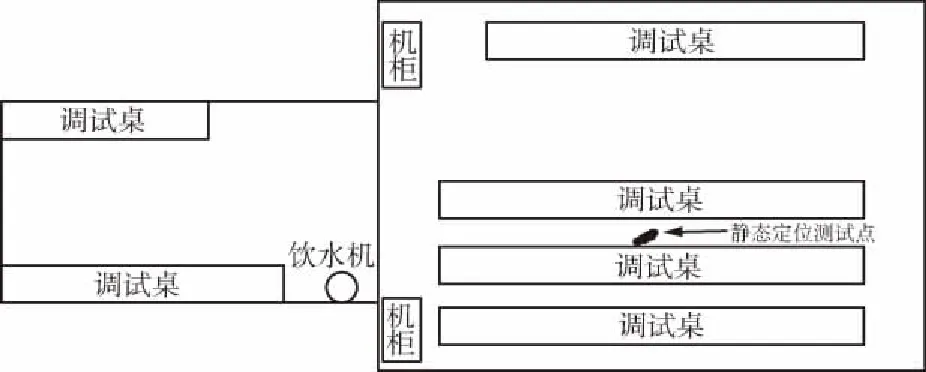
图7 静态测试结果Fig.7 Static test results
② 动态定位测试:手持测试终端在测试场行走进行动态定位测试,得到动态定位结果,测试结果如图8所示,通过测试结果可以得出,定位精度优于3 m。
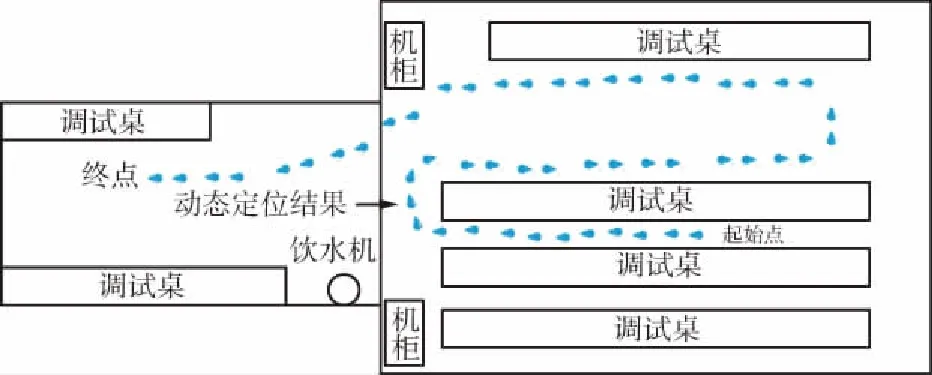
图8 动态测试结果Fig.8 Dynamic test results
4 结束语
经过实际测试表明,通过对智能手机终端内部WiFi、蓝牙及地磁等传感器数据进行深度学习,构建训练数据集,通过机器学习算法实现不同数据的融合,较好地解决了室内连续、稳定定位问题,同时实现优于3 m的室内定位精度。
由于研究水平有限,本文的定位方法在定位精度、定位效率等方面都有待提高,其中指纹定位的指纹采集工作量太大,需要花费很多时间和精力,后续会加强自动指纹采集平台研究,增加定位效率。
