使用动量交换装置的滚转角稳定控制∗
2020-03-03杨帆
杨 帆
(中国船舶重工集团有限公司第七一〇研究所 宜昌 443003)
1 引言
为满足诱饵火箭弹作战需求,缩短调节时间,提高滚转通道稳定性和抗扰动能力,提出滚转通道与俯仰偏航通道解耦的控制方式。借鉴卫星姿态控制方式,采用动量交换装置实现滚转角稳定控制。动量轮具有可靠性高、控制精度高和功耗低等优点,已被广泛应用于卫星姿态控制中[1~2]。
滚转通道执行机构为直流力矩电机,具有非线性性、参数不确定性和易受外部扰动因素的影响等特点[3]。滑模控制由于滑动模态可以进行设计,且与控制对象参数和扰动无关,无须在线辨识等优点[4],所以在解决这些问题方面表现优秀。
本文从现有实际需求出发,建立了滚转通道动力学模型和动量轮动力学模型,设计了滚转通道控制系统,其中,外回路采用PID控制算法,动量轮内回路采用滑模控制算法提高系统抗扰动能力,并开展了仿真研究,为诱饵火箭弹的设计提供了一种可能性。
2 控制模型建立及分析
动量交换控制的基本原理就是动量矩定理,系统的总动量矩矢量对时间的导数,等于作用在系统上外力矩矢量之和。如果利用某些控制执行机构将系统的一部分的动量矩发生改变,则系统其余部分的动量矩将发生大小相等方向相反的改变。
2.1 控制原理
在诱饵弹三通道控制模型中,滚转通道与俯仰偏航通道设计解耦,在进行滚转运动研究中,我们假定ωx=ωz=0;ϑ=ψ=0。诱饵火箭弹滚转通道动力学模型为

根据动量矩定理可以得到滚转力矩表达式为
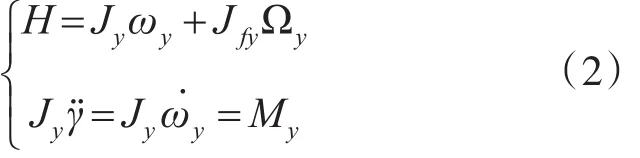
其中,H为系统总动量矩,Jy为诱饵火箭弹(含转子舱)绕 y轴的转动惯量,Jfy为转子舱绕 y轴的转动惯量,ωy为诱饵火箭弹绕y轴的转动角速度,Ωy为转子舱相对火箭弹绕 y轴的转动角速度,γ为火箭弹滚转角。
2.2 动量轮动力学模型
滚转角的高精度控制实质上就是动量轮的高精度转速控制。动量轮工作原理如下:当动量轮内的电机绕组中按规律通入电流时,电机产生转矩(最终达到一定的转速)从而形成一定的动量,该转矩或动量作用到动量轮的安装载体上,就会改变载体滚转角或抵抗扰动转矩[5~7]。假设[8]:
1)电机的气隙磁感应强度沿气隙按正弦分布。
2)绕组通电时,该电流所产生的磁通对气隙磁通的影响忽略不计。
3)控制电路在开关状态下工作,功率器件压降为恒值。
4)各项绕组对称,其相应的电路单元完全一致,相应的电气时间常数忽略不计。
根据永磁电机原理[9~10]有:

动量轮动力学模型如图1所示。
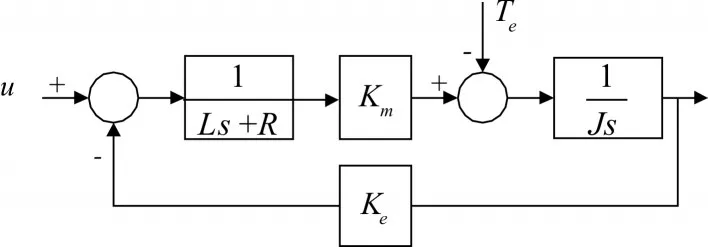
图1 动量轮动力学模型
由控制器给出控制电压,使动量轮转速变化,改变转子舱的动量矩,并输出反作用力矩作用于诱饵火箭弹。动量轮理想传递函数为

2.3 动量轮动力学模型修正
在实际工作中,动量轮并不理想。一方面,电机内部存在摩擦阻尼。且摩擦力矩为非线性,会随着工作环境发生变化;另一方面,存在扰动力矩的作用。本文在模型处理时,将摩擦力矩和扰动力矩作为外部扰动融合到电压扰动中。由此得到电机转速与输入电压的关系为

3 控制算法设计
诱饵火箭弹滚转角回路采用PID控制算法,动量轮电机采用滑模控制算法。
3.1 PID控制算法
PID控制算法的数学模型[11]为

其中,ωd为动量轮电机的期望转速;e(t)=γ(t)-γd(t)为滚转角误差;Kp、Ki和Kd是控制器的比例、积分和微分增益。
控制系统结构图如图2所示。

图2 控制系统结构图
3.2 滑模控制算法
针对式(5)的控制问题,采用滑模控制[12-13]思想分别设计等效控制器和切换控制器。
1)滑模面设计
滑模面 s=ce+e˙,其中 c≥0,e=ω-ωd为电机转速误差。
2)等效控制器(不考虑扰动)

取s˙=0可知不存在扰动时的等效控制律u1为

3)切换控制器
切换控制器用来克服外部扰动,设克服扰动的切换控制律为u2,那么动量轮的实际控制律u=u1+u2。

其中,g为外部扰动,外部扰动大小未知,但有界。设‖‖g≤G。

在动量轮高精度控制中,输入电压幅值有限,设幅值上限为umax。
引入饱和函数sat(u),则实际输入电压为

4 仿真分析
数值仿真建立在Matlab的Simulink环境中,诱饵火箭弹及动量轮电机参数如表1所示。
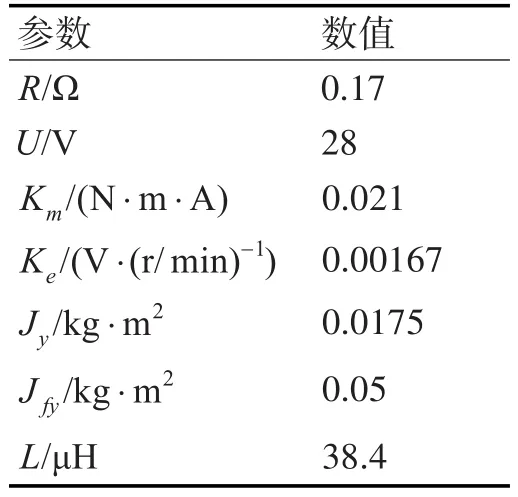
表1 诱饵火箭弹及动量轮参数
设定期望滚转角 γd=0°,滚转角初始值γ=20°,取 kp=20.16,ki=0.01,kd=0.58,c=2,k=-2.25,采用本文设计的控制器和控制算法。仿真曲线图如图3所示。图3为无扰动时的控制效果图。
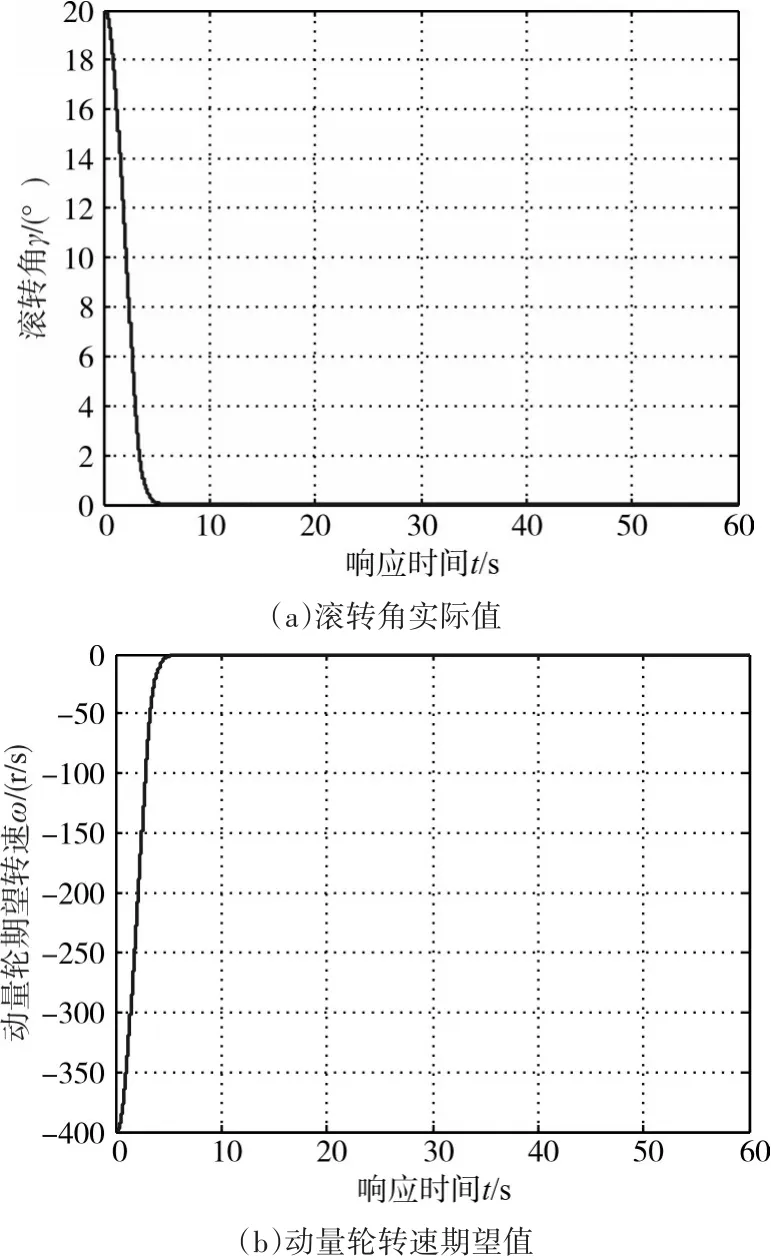

图3 无扰动时的控制效果图
诱饵火箭弹在工作过程中,会受到各种扰动因素的影响,既有外部扰动,也有内部扰动。本文将外部扰动等效于实际滚转角的一部分反馈回仿真模型中,将内部扰动等效于电机输入电压误差∆u,也就是滑模控制器需要解决的外部扰动量作用于电机回路。
设定期望滚转角 γd=10°,滚转角初始值γ=0°,在30s时分别加入等效幅值为1°,周期为30s脉冲占比为10%的外部脉冲扰动和等效幅值为5°,周期为30s脉冲占比为10%的内部脉冲扰动,仿真结果如图4和图5所示。图4为外部扰动时的控制效果图,图5为内部扰动时的控制效果图。

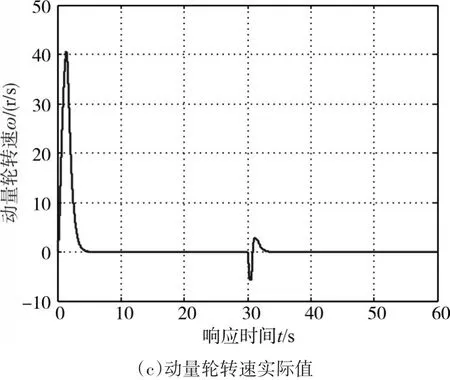
图4 外部扰动时的控制效果图

图5 内部扰动时的控制效果图
设定期望滚转角 γd=10°,滚转角初始值γ=0°,同时加入内部和外部两种扰动,其中,在30s时加入等效幅值为5°,周期为30s脉冲占比为10%的内部脉冲扰动,在37s时加入等效幅值为1°,周期为30s脉冲占比为10%的外部脉冲扰动,仿真结果如图6所示。图6为外部和内部扰动同时作用下的控制效果图。

图6 两种扰动时的控制效果图
仿真结果表明:诱饵火箭弹在PID控制和滑模控制作用下能快速到达期望滚转角附近,调节时间在4s以内,响应速度快,稳态误差几乎为零,控制精度满足要求。从图5~图7可以知道,控制系统具有很强的控制能力,对内部和外界扰动具有很强的鲁棒性,使用动量交换装置的滚转通道具有稳定性,控制方案可行。
5 结语
本文主要对诱饵火箭弹滚转通道进行了研究,建立了滚转通道的动力学模型,针对其执行机构与常规火箭弹的差异,进行了建模和控制算法研究,设计了控制系统。对系统外回路设计PID控制器,对动量轮电机设计滑模控制器,并通过仿真验证了控制系统的有效性,对诱饵火箭弹滚转通道的后续研究具有一定参考价值。
