基于ADAMS的消毒柜层架升降机构动力学仿真及分析
2020-02-27贾志强刘欢蒋济武
贾志强 刘欢 蒋济武
JIA Zhiqiang1 LIU Huan2 JIANG Jiwu1
1.广东美的洗涤电器制造有限公司 广东佛山 528311;2.广州番禺职业技术学院 广东广州 511483
1. Guangdong Midea Washing Appliance Manufacturing Co.,Ltd. Foshan 528311; 2. Guangzhou Panyu Polytechnic Guangzhou 511483
1 引言
随着物联网信息技术的发展,家用厨房电器也在不断的升级换代,消毒柜便是其中较为重要的一种。目前市场中的大多数消毒柜都与洗碗机等相关电器配套使用,安装于烹饪器具下方的橱柜中,以双层、三层结构为主。为解决现有的消毒柜下层碗篮位置低;提升过程中所需力较大;用户体验差等问题[1],已有人设计了一种家用双层消毒柜碗篮抬升机构[2]。本文对现有的抬升机构进行优化,加入气弹簧缓冲装置,实现省力缓冲的作用;并基于ADAMS对整套装置进行动力学仿真,对比有无气弹簧的仿真结果,验证层架升降机构结构设计的合理性。
2 层架升降机构简介
消毒柜层架升降机构的主体采用四连杆机构,碗篮抬升过程分为两步:第一步是水平滑轨抽拉至限定位置;第二步是四连杆从竖直状态旋转至水平状态,其机构图以及提升过程中的状态图如图1所示。
四连杆式消毒柜升降机构主要由以下几个模块组成:滑轨抽拉及抬升模块、气弹簧缓冲省力模块、限位及锁死模块,以及门把手释放模块。本文针对抬升中的第二步垂直抬升过程,基于ADAMS软件平台进行装置的动力学仿真,并结合理论分析验证层架升降机构结构设计的合理性。
3 消毒柜层架机构动力学仿真
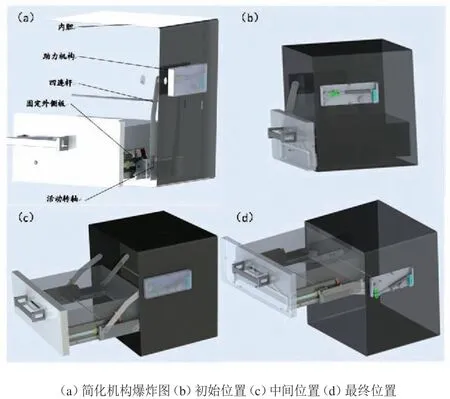
图1 消毒柜层架升降机构图及状态图

图2ADAMS的消毒柜层架升降机构虚拟样机
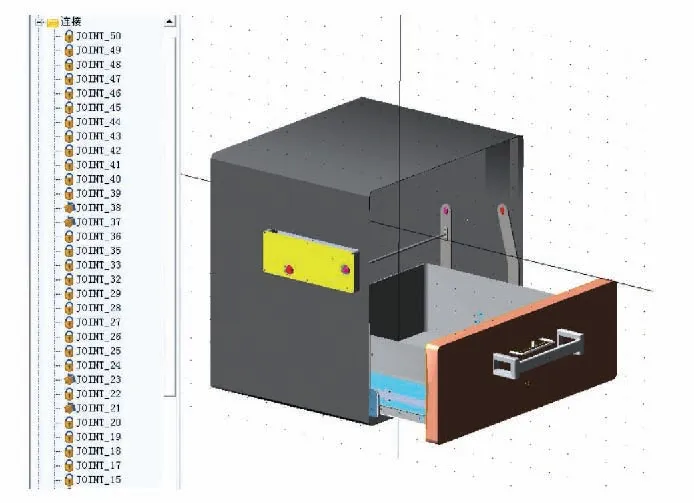
图3施加载荷及约束模型图
ADAMS软件为用户提供了强大的仿真环境,使用户能够对各种机械结构进行仿真分析,精确预测载荷的变化,计算速度、加速度以及力矩的变化曲线。因此本文利用ADAMS软件作为仿真的平台,进行层架升降机构模型的动力学分析[3-5]。以整个层架升降机构刚体系统为研究对象,当在刚体系统上施加力和给定指定运动后,考查多大的力和力矩可以产生这种运动;验证层架升降机构结构设计的合理性。
ADAMS软件仿真分析的流程一般包含以下四步:模型预处理;施加约束和载荷;仿真分析;结果后处理[6]。ADAMS软件在进行仿真分析时,会先读取输入的数据,并对其进行检查,判断系统自由度。如果系统的自由度不为零,则ADAMS软件通过分析给定的初始约束条件,判断是动力学分析还是静力学分析。如果自由度为零,则为动力学分析。消毒柜层架升降机构属于多连杆单自由度机构,在驱动原件作用下进行升降,升降过程属于动力学分析问题。
3.1 模型预处理
进行动力学分析首先需要建立虚拟样机模型,ADAMS虽然具备简单的三维建模能力,但建模过程操作起来较不友好。因此,利用ADAMS软件对消毒柜层架升降机构进行动力学仿真时,需要将SolidWorks中的模型导入ADAMS中。仿真时,先在SolidWorks软件中建立消毒柜层架升降机构的三维模型,并把模型导出为对应格式文件,然后导入到ADAMS仿真环境中。
在进行动力学仿真过程中,很多结构对仿真过程和仿真结构并无影响。为方便后续模型的动力学分析,也需要在SolidWorks软件中对消毒柜层架升降机构三维模型进行结构简化,简化包括删除一些起固定或紧固作用的零件,如消毒柜的外壳以及螺栓螺母等连接件。
模型中的力学原器件可通过添加作用力来代替,如普通弹簧可通过在ADAMS中添加柔性连接力来代替;对于平行四边形抬升机构中的气弹簧,则需预先建立气弹簧力矩模型,通过在平行四边形机构关节处添加驱动力矩[7],并设置该作用力矩的力矩函数,从而实现仿真气弹簧在层架升降过程中力矩的变化过程。对于一些仅仅起到限位作用的零部件,通过对物体进行布尔操作将零件合并,尽量减少模型中的约束关系。
通过前期预处理,建立起消毒柜层架升降机构的虚拟样机模型,如图2所示。
3.2 施加约束和负载
模型导入后首先要对构件进行编辑,包括颜色、位置、名称和材料等信息,然后添加约束。依据层架升降机构各构件之间的关系,在对应构件上施加转动副和移动副;其他由紧固件固定的地方,可通过在零件之间添加固定副来实现紧固连接。约束和载荷施加完毕后的模型如图3所示。
3.3 仿真分析
载荷约束添加完成后,对整个模型进行检查,进入仿真界面。本文只分析层架升降机构的抬升过程,分析抬升过程层架升降机构的力学特性,故不对碗篮拉出过程进行分析。然后根据设计的仿真驱动函数,设置消毒柜层架升降机构仿真抬升时间、步长等,通过ADAMS中仿真得到层架升降机构的抬升状态。仿真参数设置及仿真最终状态如图4所示。
3.4 结果后处理
ADAMS的结果后处理是为了在仿真后得到更加直观的数据显示。后处理过程中对所分析结构选取相关的结果参数,便可得到所分析结构中力或力矩随时间变化,各构件的位移、速度和加速度变化等数据。本文所研究的对象是驱动原件上驱动力矩的变化情况,因此,在分析时选取驱动原件的驱动力矩变化作为分析结果。
4 仿真及结果分析
在ADAMS仿真环境中建立了消毒柜层架升降机构虚拟样机后,根据仿真的需求设置驱动函数和相关参数,然后进行模型动力学仿真。所设计的消毒柜层架抬升机构主要由平行四边形抬升机构和气弹簧部件组成。其中气弹簧组件的设计是为了抬升碗篮时起到省力的作用,同时在将碗篮收回至消毒柜内时起到缓冲作用,从而不至于因碗篮内餐具过重导致碗篮快速下落而产生冲击,甚至损坏消毒柜。因此,动力学仿真分为有气弹簧和无气弹簧两种情况进行仿真;同时结合气弹簧力学模型进行结果分析验证。

图4仿真参数设置及仿真最终状态

图5旋转驱动的变化规律
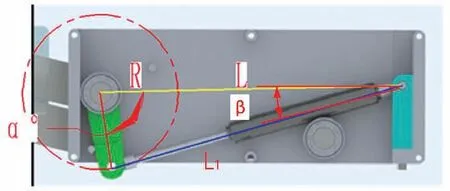
图6气弹簧力学模型图
4.1 驱动函数
为了使机构按照所需的运动轨迹运动以及仿真在实际抬升碗篮过程中的时间和抬升速度,需对整个虚拟样机的某一转动副处添加一个驱动。本文设计了相应的旋转驱动函数。所设计的驱动函数如式(1)所示,其中θ为角度,ω为角速度,β角加速度,d为机构设计相关参数:
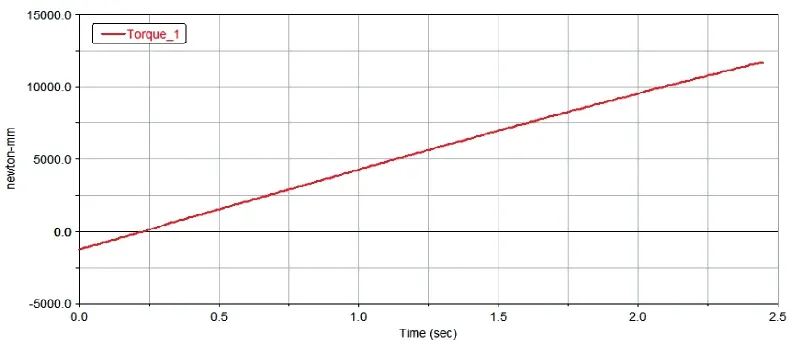
图7气弹簧力矩随时间变化曲线图

图8有气弹簧时驱动力矩变化曲线

图9无气弹簧时驱动力矩变化曲线

图10力矩曲线对比图
旋转驱动的驱动角度与时间的关系如图5所示,其中横坐标的单位为秒(符号:s),纵坐标的单位为弧度(符号:rad)。实际过程中消毒柜层架升降机构完成抬升过程需要的时间约为2.5s,故设计碗篮仿真抬升时间为2.5s;设置步长为150。平行四边形曲柄的实际抬升角度约为90度。
4.2 气弹簧结构力学模型分析
气弹簧在助力运动的过程中,其作用力基本保持恒定,不会产生太大变化,所以在运动的过程中,假定气弹簧的弹力恒定为F,其助力效果的变化主要是由于气弹簧的作用力臂改变引起的[8],所以对气弹簧的整个结构力学模型的分析也就是主要分析其力臂的变化,气弹簧力学模型图如图6所示,具体分析过程如下。
假设摇臂的半径是R,气弹簧在旋转过程中最短的长度是L,摇臂在运动过程中与两中心连线的夹角为α,α随时间t的变化关系为:

抬升过程中气弹簧长度为L1,两中心连线的夹角与气弹簧夹角为β,则有:
抬升过程中气弹簧力臂为L2,则可知气弹簧运动过程中力矩T为:

通过测量悬臂长度R为50mm,气弹簧最短距离L为200mm,带入上述公式便可得气弹簧力矩变化过程。
4.3 仿真结果分析
本文主要对碗篮抬升的过程进行动力学分析,具体分为有/无气弹簧结构两种状况。由上文对气弹簧力学模型的分析可得,气弹簧组件在碗篮抬升的过程中提供一个正向力矩,该力矩抵消一部分由载荷对驱动关节产生的重力矩,从而实现抬升过程省力的效果。如图7所示,为气弹簧组件在碗篮抬升过程中所提供力矩值的变化规律。
由图7可得,整个过程的仿真时间设置为2.5秒,气弹簧力矩值随着时间先逐渐减小后逐渐增大,图7中力矩正负只代表力矩的作用方向。其中,初始状态时力矩值为负值,并且在时间约为0.25秒时力矩值为0,这时气弹簧产生的力矩起到阻碍碗篮抬升的作用,在没有外力作用的情况下,初始状态气弹簧组件对整个层架升降机构起到限位或锁紧作用,符合设计要求。
设置好仿真参数后,同时对有/无气弹簧的两种情况进行仿真,对层架升降机构虚拟样机进行动力学仿真,如图8和图9所示,显示了平行四边形抬升机构转动关节处驱动力矩的变化曲线,力矩的大小反映出将碗篮抬升所需要的抬升力。
由图8可以看出,在有气弹簧省力机构的情况下,抬升驱动扭矩随仿真时间递进先由大变小,紧接着由小逐渐增大。其中,由大变小的过程持续时间较短,这是气弹簧组件从死点的负角度绕过死点位置的过程,故需要克服气弹簧初始力所提供的反向阻碍扭矩。
图9为在无气弹簧时驱动力矩随时间变化曲线图。由图9可以看出,驱动力矩值随时间逐渐增大,整个变化过程是一个逐渐递增的过程。为了更直观地展示气弹簧省力结构在碗篮抬升过程中的省力效果,结合图7、图8和图9的力矩曲线图,给出了如图10所示的力矩曲线对比图。
其中,蓝色力矩曲线Torque_3是在无气弹簧状态下的驱动力矩曲线,红色力矩曲线Torque_2是在有气弹簧状态下的驱动力矩曲线,粉色曲线Torque_1是气弹簧力矩曲线图。
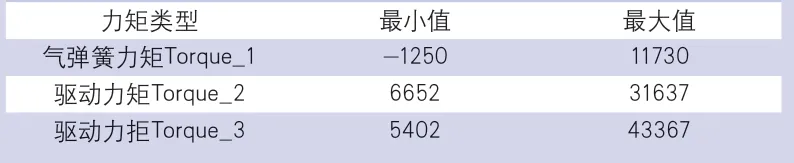
表1 各力矩曲线的最大最小力矩值(单位:N·mm)
如图10所示,对比曲线Torque_2和曲线Torque_3可以明显看出,在有气弹簧省力结构的情况下,在整个碗篮抬升的过程中,所需要的驱动力矩值相对于无气弹簧时要小得多。但在初始抬升阶段,由于气弹簧省力结构处于锁紧状态,气弹簧力矩Torque_1提供一个反向力矩,在初始阶段需要的驱动力矩值会相应大一些。如表1所示列出了三条力矩曲线力矩值的最大最小力矩值,驱动力矩Torque_3的值等于气弹簧力矩Torque_1和驱动力拒Torque_2的力矩值之和,故验证了气弹簧机构在层架升降机构中起到省力作用,验证了结构设计的合理性。
5 结论
本文基于ADAMS对消毒柜层架升降机构进行了动力学仿真及分析,在仿真过程中通过对比有无气弹簧对机构所需驱动力矩大小的影响。同时结合气弹簧的力学模型以及仿真结果,表明了在有气弹簧的情况下,碗篮抬升过程中所需要的驱动力矩比无气弹簧时要小得多;并且根据仿真曲线,驱动力矩值等于气弹簧力矩值和驱动力矩值的力矩值之和。
