An impact angle constraint integral sliding mode guidance law for maneuvering targets interception
2020-02-26ZHANGWenjieFUShengnanLIWeiandXIAQunli
ZHANG Wenjie,FU Shengnan,LI Wei,and XIA Qunli,*
1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China;2.School of Mechatronical Engineering,Beijing Institute of Technology,Beijing 100081,China
Abstract: An integral sliding mode guidance law (ISMGL) combined with the advantages of the integral sliding mode control(SMC) method is designed to address maneuvering target interception problems with impact angle constraints. The relative motion equation of the missile and the target considering the impact angle constraint is established in the longitudinal plane,and an integral sliding mode surface is constructed.The proposed guidance law resolves the existence of a steady-state error problem in the traditional SMC.Such a guidance law ensures that the missile hits the target with an ideal impact angle in finite time and the missile is kept highly robust throughout the interception process.By adopting the dynamic surface control method, the ISMGL is designed considering the impact angle constraints and the autopilot dynamic characteristics. According to the Lyapunov stability theorem, all states of the closed-loop system are finally proven to be uniformly bounded.Simulation results are compared with the general sliding mode guidance law and the trajectory shaping guidance law, and the findings verify the effectiveness and superiority of the ISMGL.
Keywords:impact angle constraint,integral sliding mode,maneuvering target,Lyapunov stability,dynamic characteristic.
1.Introduction
The well-known proportional navigation guidance (PNG)law has been widely used and studied for decades [1–4]owing to its achievement of minimal miss distance, simple structure, and effectiveness.However,advanced homing guidance laws with impact angle constraints aiming to raise the kill probability have recently received considerable attention[5–16].
Previous works on the problem of impact angle control may be investigated mainly under two categories:optimal control theory-based [17–24] and proportional navigation-based[25–27]methods.The pioneering work in the first direction is that of Kim and Grider[28],where the problem is tackled within the framework of linear quadratic optimization.Another approach in the same direction involves the usage of the Schwarz inequality [1].Guidance laws in this first group must be fed with timeto-go, which may be unavailable in practice. Conversely,the first example in the second direction is the study by Park et al.[29],where a time-varying bias term is added to proportional navigation (PN) commands as a function of range-to-go,which may be unavailable as well.
Terminal angle constraint guidance laws based on sliding mode control(SMC)[30–33]have become a research hotspot in recent years to satisfy vital requirements,including zero miss distance and terminal impact angle constraint without time-to-go estimation.SMC can handle nonlinear perturbations,external disturbances,and parametric uncertainties, thereby endowing the system with a robustness and disturbance rejection performance; the discontinuous terms may allow the system states to quickly attain a convergence characteristic relative to the continuous control laws [34]. In the guidance law design problem, the lineof-sight (LOS) angular rate is commonly used to define the sliding mode surface because the physical principle involves attaining a collision triangle [35]. The zero-effort miss distance is another candidate for designing the sliding mode surface[1].In[36],an impact angle constraint guidance law was proposed for unpowered lifting reentry vehicles against stationary targets.Moreover,an SMC-based guidance law that enables imposing desired intercept angle was designed in[37],and its applications in head-on,tailchase,and head-pursuit interception engagements were analyzed in[38].
The conventional SMC is powerful in controlling nonlinear systems but is sensitive to parameter variation and external disturbance when the system states have not yet reached the sliding mode surface[39,40].Utkin et al.[40]proposed an integral SMC (ISMC) to improve the robustness in the reaching phase. Compared with the conventional SMC, the integral sliding mode(ISM) dynamic starts from the initial time instance.Therefore,the reaching phase is eliminated, and the robustness of the system can be guaranteed throughout the entire response of the system.Hence,the introduction of an ISMC can improve the performance of the conventional SMC.ISMC schemes for linear and nonlinear systems have been continuously studied(e.g.,design methods for the ISM surfaces[39,41]and high-order ISMC methods [42,43]) and applied in many control fields (e.g., induction motor [44], five-degree-offreedom active magnetic bearing system[45],and omnidirectional mobile robot[46]).
Although the conventional SMC guidance law is well known for its simplicity and robustness, the states when the sliding mode is reached can only satisfy asymptotical stability.Such phenomenon implies that these existing guidance laws can only ensure an interception with a prespecified impact angle through the asymptotic convergence rather than the finite-time convergence.In some guidance applications,such as air-to-air combat situations,the assurance of interception with the desired impact angle within finite time is crucial. Aside from fast convergence rates,finite-time control laws usually achieve high accuracies,excellent disturbance rejection features,and strong robustness against uncertainties[47].
In practical engineering applications,the dynamic characteristics of the autopilot will considerably affect the guidance accuracy of the missile when the target is maneuvering.Therefore,considering the dynamic characteristics of the autopilot is of considerable importance in the guidance law design process.Chen et al.[48]and Zhang et al.[49]regarded the autopilot as a first-order inertia and used the optimal control and SMC methods to design the missile guidance law.The actual missile autopilot has higherorder dynamic characteristics;thus,using the second-order dynamic characteristics for description is reasonable.The authors in [50]combined the feedback linearization technology with the back-stepping method by considering the dynamic characteristics of the autopilot and the impact angle constraint and proposed an inversion recursive guidance law. In the design process of the guidance law considering the dynamic characteristics of the autopilot,if the back-stepping method is used to design the guidance law,then it will contain the second derivative of the LOS angular rate, which is difficult to obtain in engineering practice [51], thereby increasing the complexity of the system design.The related literature[52,53]used the dynamic surface control method to effectively realize the real-time estimation of the second- or high-order derivative of the LOS angular rate to solve the aforementioned shortcomings,consequently providing resolution to the“differential expansion”problem in the back-stepping method.
In this paper, an ISM guidance law (ISMGL) is employed on the basis of a finite-time stable strategy for maneuvering targets. The second-order dynamic characteristics of the autopilot are also considered through dynamic surface control methods.The integral action of the ISMGL improves the reaching phase and simultaneously introduces overshoot and lengthens the settling time. Notably, in the traditional SMC, the boundary layer method is introduced to inhibit control chattering due to the presence of uncertainties and disturbances.Such an approach will introduce a steady-state error to the system.Moreover,the integral term can eliminate the steady-state error of the system and enhance system robustness. Furthermore, the proposed guidance law is designed with no specific values on the target acceleration and can yield excellent performance and desirable robustness properties.Through the finite-time convergence,the proposed guidance law could quickly converge to zero and ensure the hitting accuracy and impact angle constraints.
The remainder of this paper is organized as follows.Section 2 outlines the problem statements and describes the preliminary concepts.Section 3 provides the proposed ISMGL and the finite-time stability analysis of the closedloop guidance system.Section 4 presents the proposed ISMGL considering the dynamic characteristics of autopilot and convergence analysis. Section 5 shows the nonlinear simulation results with some comparisons. Finally, Section 6 offers some conclusions of this work.
2.Preliminary concepts
In this section, the nonlinear missile interception engagement is derived in the longitudinal plane. Some required basic fundamental facts are also presented.
2.1 Problem formulation
Assuming that the missile and the target are point masses with constant moving speeds,Fig.1 depicts a possible planar homing engagement geometry between the missile and the target,whereMandTare the positions of the missile and the target,respectively;vMandvTare the velocities of the missile and the target,respectively;aMandaTare the normal accelerations of the missile and the target,respectively;θMandθTare the flight path angles of the missile and the target, respectively;qis the LOS angles between the missile and the target;andris the relative distance between the missile and the target.All angles are positive in the counterclockwise direction.
From Fig.1, the relative kinematic equations are given in(1)–(4).


Fig.1 Geometric relationship between missile and target
Deriving on both sides of(2)to time reveals the following:

Assumption 1The normal acceleration of the target is bounded;at any timet,acceleration satisfies|aT(t)|≤d,wheredis the upper bound of target acceleration.
Assumption 2In the guidance process, for any momentt >0, there iswhen the missile hits the target,r ∈[0.0 m,1.0 m].
The engineering consideration of Assumption 1 involves rudder control capabilities,which are usually limited.For Assumption 2,such consideration entails the warhead operating distance. Whenr <1 m, the operational range of the warhead is regarded to cover this area. For convenient comparison with other guidance laws,the constant moving speed of the missile is considered firstly. In practical engineering application, if the velocity change rate is measured, then the guidance law is suitable for a variable speed. The simulation in Section 5.3 will verify this situation.
The impact angle is the angle between the velocity vector of the missile and the target at the end of the collision.Therefore,considering the constraint on the impact angle,strictly limiting the flight path angle when the missile hits the target (miss distance<1 m) is necessary. By definition, the end of the guidance istf, the expected impact angle isθd,and the desired LOS angle isqd.Therefore,the design of the guidance law considering the impact angle constraint refers to the missile accurately hitting the target at the desired impact angle.That is
Equation(8)indicates that the target is within the field of view of the missile seeker when the missile hits the target.From(2)and(6):

From (7), a unique flight path angle of the missileθM(tf)can be ascertained if the flight path angle of targetθT(tf) is known for the desired missile impact angleθd.Then,the desired LOS angle can be obtained from(6)and(8). Hence, the control of the impact angle can be transformed into the control of the final LOS angle.
2.2 Fundamental facts
Before designing the guidance law, the definition of the finite-time stability in SMC is first introduced.
Definition 1[54] Consider the following nonlinear system:

wheref(x) :D →Rnis defined as a value onDin thendimensional space Rnand satisfies the local Lipschitz continuity function.For the system(10),f(x) :U →Rnis a continuous function forxon the semi-open domainUcontaining the origin. The finite-time convergence is represented by∀x0∈U0⊂Rn, and there exists a continuous functionT(x) :U0{0} →(0,+∞), thereby making the solution of the system (10)x(x0,t) satisfy:whent ∈[0,T(x0)], there existsx(x0,t)∈U0{0}andand whent >T(x0), there existsx(x0,t) = 0. Suppose the equilibrium point of the system (10) isx= 0, when and only when the system is strongly stable and converges in a limited time,the equilibrium pointx= 0 of the system is then regarded as stable in finite time.IfU=U0∈Rn,then the equilibrium point is stable globally in finite time.
Lemma 1[55] Suppose the existence of a continuous differentiable positive definite functionV(x) defined in a neighborhood of the origin.For the real numbersc >0 and 0< β <1,there isandx ∈U{0}.Then,the system could converge to the origin in finite time,and the upper bound of the convergence time is satisfied as follows:

3.Impact angle constrained ISMGL
In Section 3.1, the proposed ISMGL is developed on the basis of the finite time convergence theory.In Section 3.2,the finite-time stability of the closed-loop guidance system is established.
3.1 Guidance law design
Assuming that the missile autopilot is ideal,thenaM=ac,whereacis the normal acceleration command for missile motion during guidance.Taking the state variablex1=q,, the state equation of the guidance system can be written as follows:
Letebe the error between the actual and the expected LOS angle in the guidance process, that is,e=q -qd.Then,andk1andk2are design parameters larger than zero.An integral sliding surface is constructed as

Rewrite(13)as

For the sliding surface (14), the proposed ISMGL is given by

With the guidance command shown in(15),the LOS angular rate and error could converge to zero in finite time,thereby revealing a precise attack in a specific impact angle.In(15),the integral term of the ISMGL improves the reaching phase.Although such term may cause overshoot and lengthen the settling time,it can eliminate the steadystate error of the system and enhance its global robustness.Meanwhile, through (15), there is no need to know specific values of the target acceleration which is convenient for engineering applications.
For the parameter selection in the constructed integral sliding surface (14), increasingk1andk2can effectively reduce the sliding surface deviation, By contrast,k1andk2affect the stability of the sliding surface such that excessivek1andk2will prevent the sliding surface from achieving stable convergence,resulting in the system state divergence.Increasingk3can effectively reduce the steady-state error when the sliding surface converges,but excessivek3will lengthen the adjustment time during the convergence of the sliding surface. Therefore,k1,k2andk3must be reasonably chosen.
3.2 Stability analysis

ProofThe derivation of(14)is shown as

Substituting(12)into(16)yields

Substituting(15)into(17)reveals that

The Lyapunov function is then constructed as follows:

By derivingV1to timet,the following is obtained:


In(20),
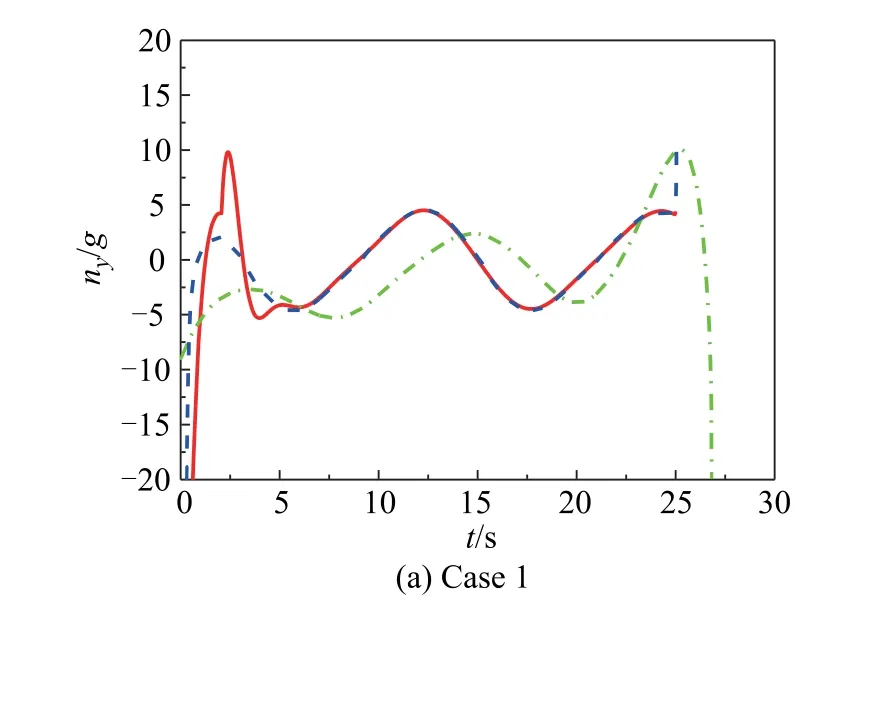
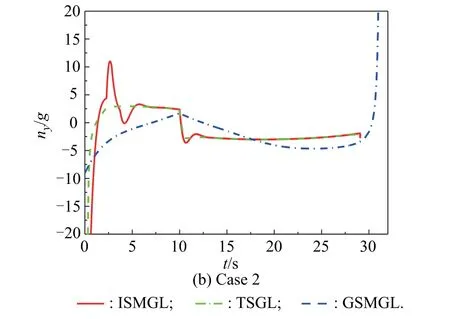
During the guidance process,and 0< r(t) From(21),the following is obtained: T1is the convergence time. From Lemma 1, it can be obtained that the system is arriving at the sliding surface in finite time which means whent≥T1. Next, the convergence of the LOS angle tracking error and the LOS angular rate should be proven. Let Then, By taking the Laplace transform on both sides of (26),the following is obtained: Then, In(28),srepresents a Laplacian variable,and according to the final value theorem, When the missile hits the target,ω(t)is a constant value,that is,is a constant;therefore, It’s amazing how a brief phone call can totally turn one’s life upside down. Suddenly, I began hearing those 1970s songs (now known as “oldies”) in a different arrangement, realizing that Mick Jagger was over 50, “Smoke on the Water” never did make any sense at all, and my “Seasons in the Sun” had literally6 faded into oblivion. Had the sun set on me already? The Lyapunov function is constructed as Equation(32)is derived with(31): To realizeV˙e≤0,the following inequality must be satisfied: Then, Finally, From(36),the appropriate parameters ofk1,k2andk3could be obtained to generate a small steady-state error ofTherefore, by adjusting these parameters, the LOS angular rate errorcan be arbitrarily small. According to Lasalle’s invariance principle[57],the equilibrium point of(31)ise=0 andthat is, In the actual guidance process, the autopilot tracks the overload command generated by the guidance loop by producing a specific control force.However,a certain lag exists between the overload and overload command,thus affecting the guidance accuracy.Therefore,investigating the guidance law that considers the dynamic characteristics of the autopilot has practical significance. This section uses a dynamic surface control method to design a guidance law that considers the dynamic characteristics of the autopilot. The dynamic surface control method is developed on the basis of back-stepping and multi-face sliding mode control. This method avoids the second-order differentiation of the state variables and thus overcomes the“differential expansion”problem. First,the autopilot with high-order dynamics is approximated as a second-order dynamics as expressed below: whereaMis the actual normal acceleration of the missile,uis the normal acceleration command generated by the guidance loop, andξandωnare the damping ratio and natural frequency of the autopilot,respectively. Two new states are defined asx3=aMandThe equation of the state variable considering the dynamic characteristics of the autopilot is Step 1Design the virtual control variableofx3. Define the first dynamic surface as DifferentiatingS1totproduces Choosing the virtual control variableto realizeS1→0 results in whereK2is a positive real number, andis passed through a first-order low-pass filter whose time constant isτ3>0.Then,the virtual control variablex3dis obtained. where(0)represents the initial value. Step 2Design the virtual control variableofx4. Define the second dynamic surface as DifferentiatingS2totgenerates Choosing virtual control variableto realizeS2→0 produces whereK3is a positive real number, andis passed through a first-order low-pass filter whose time constant isτ4>0.Then,the virtual control variablex4dis obtained. Step 3Design the actual control variableu. Define the third dynamic surface as DifferentiatingS3totgenerates Designing the actual control variableuto realizeS3→0 results in whereK4is a positive real number.Therefore,the actual control variable is Thus far, the design of the guidance law considering the dynamic characteristics of the autopilot has been completed.Equation(50)is the normal acceleration command generated by the final guidance loop. The convergence of the closed-loop system under the action of the designed ISMGL is demonstrated below. First,the following boundary layer errors are defined: Substituting (51) and (52) into (43) and (47), respectively,yields The Lyapunov function of the closed-loop systems is chosen as Differentiating(55)totyields In(56),Young inequalityab≤a2/2+b2/2 results in Moreover, Given that the relevant parameters and their derivatives in(1)–(4)are bounded,the following equations can be obtained: whereχ3andχ4are continuous positive functions, and for any positive number,Bκ={(S1,S2,S3,y3,y4)T:V≤κ},which is a tight set.A maximum value forχ3andχ4exists inBκ, as respectively denoted byM3andM4.M3is determined byk1,k2,k3,K2andε, whereasM4is determined byk1,k2,k3,K2,K3,εandτ3.The following equation can then be obtained: The aforementioned analysis shows the following: Then,the following is chosen: whereαis a positive number,and IfV=κandα >ρ/κ,thenThus,ifV(0)≤κ,thenV(t) ≤κexists for allt≥0.According to the comparison principle, the following equation can be obtained from(66): Therefore,S1,S2,S3,y3andy4, as well asx1,x2,x3,x4,x3d,x4d,are uniformly bounded.For anyk1,k2,k3andε, if the design parametersKi(i= 2,3,4) is sufficiently large andτi(i= 3,4) is sufficiently small, thenαis sufficiently large; therefore,ρ/αcan be arbitrarily small.This condition means thatS1is bounded and arbitrarily small. According to the analysis in Section 3,the LOS angle erroreand LOS angular rate error ˙eare bounded and arbitrarily small. This section performs numerical simulations for the final guidance of the missile interception of a maneuvering target to verify the effectiveness and superiority of the proposed ISMGL considering the impact angle constraint and the autopilot dynamic characteristics.In the simulation,the missile and the target move in the vertical plane, and the simulation step is 0.01 s.The initial position of the missile isxM(0) = 0 m,yM(0) = 0 m;the initial position of the target isxT(0) = 5 000 m,yT(0) = 3 000 m. Assume that the missile has no thrust and the model is ideal, that is,= 0 m/s2.The flight speed of the missile isvM=450 m/s, the initial flight angle of the missile isθM(0) =60°,the autopilot damping ratio of the missile isξ= 0.7,the natural frequency isωn= 20 rad/s,the expected LOS isqd= 30°, the initial speed of the target isvT(0) =238 m/s,and the initial flight angle of the target isθT(0)=0°,g= 9.8 m/s2.The simulation of the target mobility is divided into the following two cases. Case 1The target makes a periodic maneuver,that is Case 2The target makes a non-periodic maneuver,that is, The parameters of the ISMGL considering the impact angle constraint and the autopilot dynamics are designed as follows:k1= 1,k2= 1.5,k3= 1,ε= 70,K2= 10,K3=10,K4=10,τ3=0.01 andτ4=0.01. Simultaneously,the proposed method is compared with the trajectory shaping guidance law (TSGL) [58] and the general impact angle constrained sliding mode guidance law (GSMGL) [59] to further illustrate the superiority of the ISMGL.The normal acceleration command generated by the TSGL is whereVris the relative speed,andtgois the time-to-go. For the design of the GSMGL,the following sliding surface is selected: wherex1=q-qdand The normal acceleration command generated by the GSMGL can be obtained as follows: For fair comparison, the GSMGL parameter is chosen asmi=ki(i=1,2,3)andε=70. The continuous saturation function shown below is used to smoothen and weaken the control variable highfrequency chattering problem caused by the sign function: whereφis the defibrillation factor,andφ= 0.01 is taken in the simulation. Fig. 2 is the relative motion curves between the missile and the target during the interception process.For intercepting maneuvering targets, the ISMGL and GSMGL generally adopt SMC methods,and the missile trajectories are similar under the two commands. Compared with the TSGL,the ISMGL shortens the interception time,straightens the trajectory,and lessens energy consumption,providing an ideal impact angle. Fig.2 Curves of relative movements between missiles and targets Fig.3 is the LOS angular rates of the relative movements during the guidance process.When the target is maneuvering, the ISMGL can ensure the rapid and stable convergence of LOS angular rate to 0 and effectively reduces the need for the seeker in the end to hit the target accurately.The GSMGL can maintain the LOS angular rate near zero in the middle of flight, but a certain divergence occurs in the end which is not conducive to the terminal accurate interception.The LOS angular rate of the TSGL cannot remain near zero during flight,and divergence occurs in the end. Thus, for maneuvering targets, the TSGL’s LOS angular rate considerably changes throughout and consumes additional energy, thereby losing its advantage over stationary targets.Therefore,the ISMGL is effective in intercepting maneuvering targets. Fig.3 Curves of LOS angular rates Fig.4 is the LOS angle curves of the relative movement during the guidance process.The ISMGL and GSMGL use the angle constrained sliding surface to quickly convergeto the desired LOS angleqd= 30°.The LOS angle remains at around 30°during flight and exhibits a minimal change.The LOS angle of the GSMGL has a certain increase in the end for the periodic maneuvering target.This increase is due to the absence of integral in the sliding surface to eliminate the steady-state errors, thus possibly causing definite errors.For the TSGL,the LOS angle considerably changes during flight and cannot remain at around 30°.The angle only converges at around 30°in the end. The large change in the LOS angle during flight is not conducive to the interception of maneuvering targets. Fig.4 Curves of LOS angles Fig. 5 is the curves of the normal overload commands generated by the ISMGL, GSMGL, and TSGL considering position and angle constraints. Fig. 5 shows that the GSMGL has a certain divergence in the end,the TSGL has a large divergence in the end which is not conducive for an accurate interception, and the ISMGL effectively suppresses the phenomenon,thereby ensuring the accuracy of hitting the maneuvering target. Fig.5 Curves of normal overload commands Therefore, although the ISMGL causes the required overload exceeding the limitation in the initial stage, it reduces the overload in the later stage. Usually, the missile has more energy in the initial stage and less energy in the end.Therefore,the command variation of the proposed guidance law is suitable for maneuvering targets. Fig.6 shows the sliding mode curves of the ISMGL and GSMGL.Both sliding surfaces can converge to 0 at a relatively fast speed and have strong robustness.Moreover,the designed integrated sliding surface reduces the steady-state errors at the end and ensures the impact angle closer to the desired impact angle. Fig.6 Curves of sliding mode surfaces Fig. 7 depicts the changes in the relative distances between the missile and the target during the interception process. The SMC can evidently shorten the interception time, and the miss distance is small. It is worth pointing out that if the target’s maneuvering value is increased,then the TSGL will be unable to hit the target;while under the same conditions,both ISMGL and GSMGL can hit the target. Fig.7 Curves of relative distances between missiles and targets Fig.8 illustrates the contrast curves of the normal overload command to verify the ISMGL considering the dynamic characteristics of the autopilot. The normal overload command generated by the ISMGL considering the dynamic characteristics of the autopilot isaMand ignoring the autopilot dynamics,the normal overload command isaC. Fig.8 Curves of overload commands By adopting this method, the influence of the dynamic characteristics of the autopilot on guidance accuracy is reduced. Table 1 shows the comparison of the guidance parameters of the three kinds of guidance laws, including the ISMGL, GSMGL, and TSGL under two cases. The data in Table 1 indicate that when the target is maneuvering,the ISMGL can ensure that the missile intercepts the target with a small miss distance and an ideal impact angle,thereby fully verifying the effectiveness of the ISMGL.The GSMGL can maintain small miss distance and desired impact angle during flight but may demonstrate divergence of the LOS angle at the end.The TSGL has long interception time and a large miss distance,thus failing to successfully intercept the target with large maneuverability. Table 1 Comparison of the three simulation results of guidance laws In this section, the seeker is considered to have the measurement errorsandfor corresponding statesandto further illustrate the robustness of the ISMGL during the interception process.For engineering consideration,the errors are random numbers subjected to the normal distribution and denoted as whereandare standard deviations that satisfy Then, the actual state variable required in the ISMGL should be whereandare the nominal values. For the target with non-periodic maneuver in Case 2,four different initial flight path angles are conducted to facilitate interception and the initial flight anglesθM(0)are 0°, 30°, 60°and 90°. Other initial conditions and guidance system parameters are unchanged,and the simulation results are presented in Table 2. Table 2 Comparison of the guidance simulation results of ISMGL under different initial conditions Table 2 shows the simulation results when the missile finally hits the target with different initial flight path angles.As shown in Table 2, although there exists measurement errors of the seeker, the ISMGL can ensure the miss distance of the guidance system less than 1 m and the error angle less than 1°.Therefore,the missile can accurately hit the maneuvering target with the desired LOS angles under deviation conditions. Fig.9 shows the measured and actual values of the state variablesandIt can be seen the measurement noises are random numbers. Fig. 10 shows the relative movements between the missile and the target under different initial conditions. The missile intercepts the target under different initial conditions and quickly converges to the desired sliding surface. Fig.9 Measured values and actual values of the relative motion Fig.10 Curves of engaged movements between missiles and targets under different initial conditions Thus the proposed ISMGL is robust to measurement errors and different initial conditions. Fig.11 and Fig.12 are the curves of the LOS angles and the LOS angular rates under different initial conditions,respectively.As shown in Fig.11 and Fig.12,under different initial conditions,when considering the measurement error of the seeker,the LOS angles converge to the desired value and the LOS angular rates converge to zero.Therefore,the proposed ISMGL has a strong resistance to disturbances. Fig.11 Fig. 17 Curves of LOS angles under different initial conditions Fig. 12 Curves of LOS angular rates under different initial conditions For the designed integral sliding surface, although the initial conditions are different at the beginning of the simulation, the sliding surfaces are guaranteed to be located nearS=0 in Fig.13. Fig.13 Curves of sliding mode surfaces under different initial conditions Fig. 13 also shows that the proposed guidance law has resistance to disturbances, so the designed ISMGL is robust and stable to system uncertainties.Fig.14 and Fig.15 respectively show the changes of the relative distances between the missile and the target and the changes of normal overloads under different initial conditions.The simulation results show that the ISMGL can ensure the missile accurately hits the target even under different initial conditions,and the normal overloads converge near zero when hitting the target. Fig.14 Curves of relative distances between missiles and targets under different initial conditions Fig. 15 Curves of normal overloads under different initial conditions In this section, additional simulations are conducted with a realistic missile model. The aerodynamic drag and gravity are considered in the realistic missile model,which is taken from[60].The nonlinear dynamics equations of the missile are given by whererepresents the acceleration command for the models without gravity compensation.Therefore,the guidance law is written as The initial velocity of the missile isvM= 1 000 m/s,while the initial velocity of the target isvT(0) = 50 m/s.The target has constant maneuveringaT= 1 g. Other conditions and parameters are the same as in Section 5.1.The disturbances are the same as in Section 5.2. The initial flight anglesθM(0)are also 0°,30°,60°and 90°.The detailed simulation results are displayed in Figs.16–21. Fig.16 Curves of engaged movements under the realistic model Fig.17 Curves of LOS angles under the realistic model Fig.18 Curves of LOS angular rates under the realistic model Fig.19 Curves of sliding mode surfaces under the realistic model Fig.20 Curves of velocities under the realistic model Fig.21 Curves of normal overloads under the realistic model Evidently, the missile accurately hits the maneuvering target with the realistic model when disturbances exist.The LOS angles and the LOS angular rates respectively converge to the expected value and zero. The velocities considerably decrease due to the gravity and air force. The sliding surfaces can still converge to zero,and the normal overloads can converge near zero. Aiming to solve the problem of intercepting maneuvering targets considering impact angle constraints and dynamic characteristics of autopilot,an ISMGL is proposed in this paper. The guidance law is firstly designed based on the finite time convergence theory, and the stability of the closed-loop system is established based on the Lyapunov theorem. Then a dynamic surface control method is adopted for consideration of dynamic delay. The convergence of the system is also demonstrated. Simulation results show that the proposed guidance law achieves accurate interception in the desired impact angle for the maneuvering targets and eliminates steady-state errors of the traditional SMC,and has a strong robustness in the guidance process compared with the GSMGL and the TSGL.Simultaneously,the effectiveness and superiority of the ISMGL are fully verified under different initial conditions with the realistic missile model and measurement noises.















4.ISMGL considering dynamic characteristics of autopilot
4.1 Guidance law design












4.2 Convergence analysis
















5.Simulations and analysis
5.1 Nominal case simulations













5.2 Disturbance case simulations










5.3 Realistic missile model case with disturbances











6.Conclusions
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- A method based on Chinese remainder theorem with all phase DFT for DOA estimation in sparse array
- A simplified decoding algorithm for multi-CRC polar codes
- Compressive sensing based multiuser detector for massive MBM MIMO uplink
- Joint 2D DOA and Doppler frequency estimation for L-shaped array using compressive sensing
- Carrier frequency and symbol rate estimation based on cyclic spectrum
- Attributes-based person re-identification via CNNs with coupled clusters loss