魔方还原机器人的结构分析*
2020-02-25胡浪飞黄永程陈建鸿
胡浪飞,黄永程,曾 浈,徐 圳,陈建鸿
(广东理工学院,广东肇庆 526100)
0 引言
随着当今人类社会的快速发展,“智能化”成为21世纪的一个新主题。在这个时代背景下,很多工作都可以让人工智能为人类代劳。魔方是一种益智玩具,复原魔方任意组合的转动次数的最小值也被称为“上帝之数”[1],这不仅是一种烧脑的智力玩具,也是一种会让人沉浸于如何破解魔方的头脑风暴之中的趣味玩具。但是面对魔方的多变性,所需的公式越发繁杂,单靠人类的头脑想要快速破解显然不易,但是人工智能能够很好地解决这个问题。魔方还原机器人为快节奏的生活增添了一份乐趣,将科学技术融入学习生活,极具创新创意思维。
本文介绍的魔方还原机器人的原理,以及它整体的设计涵盖了许多领域的知识与技术:结合了机器视觉、还原算法分析、机器人执行机构的设计等模块,融合成一体,形成魔方还原系统。文中的魔方还原机器人主要结构由2个带有两爪机械手的机械臂构成。机械臂主要通过2组舵机作为动力源提供动力,从而驱动整个魔方还原机器人的复原动作。
1 总体方案设计
魔方还原机器人是机器人智能化的一种新体现,魔方还原机器人的机械结构设计以及还原算法的分析编译是该机器人的核心内容。本文阐述的基于LAP 15W8K61S4芯片的魔方还原机器人是一台能够通过计算,迅速解出还原步骤并将魔方快速复原的机器人。图1所示为本文设计的魔方还原机器人的整体架构图。它涵盖了魔方颜色识别,还原步骤算法解析计算,机械爪夹取系统以及机械臂旋转系统。主体机械结构由2只机械臂组成,通过云台搭建固定在支撑架上,在2组舵机的分别驱动下,实现机械臂的转动以及夹爪的夹取运动,从而实现魔方面的转动。舵机组1带动爪子联动机构,进而使机械爪在平滑的导轨上实现张开与夹紧动作;舵机组2带动云台转动,实现机械臂的转动[2]。
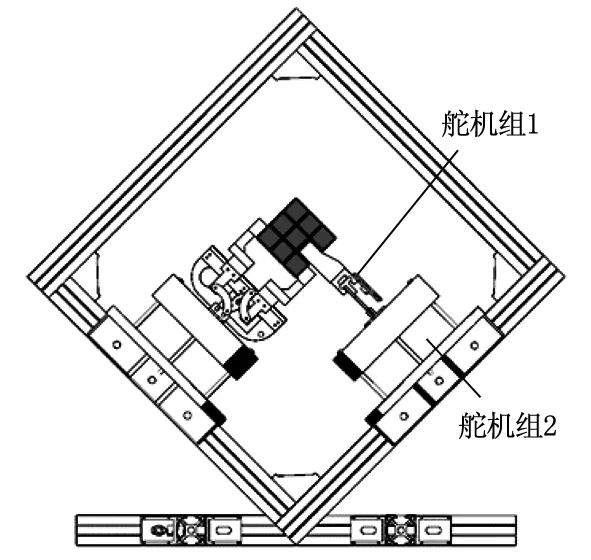
图1 魔方机器人架构图
2 整体结构设计
目前魔方机器人的机械结构主要有类人双臂式和四轴旋转式2种类型[2],相比之下,类人双臂式的魔方放机器人结构更为简单,控制系统协调度更高,成本更低。该魔方还原机器人复原过程需要2只机械臂同时工作,相互配合运动来完成相应复原转动的动作。为使机械臂能够互相独立工作,做回转运动时互不干扰,机械臂需满足手臂的中心线在同一平面且垂直,故机械臂采用双臂交叉正交结构,分别在魔方的两侧斜45°向上,从两侧支撑魔方。两机械臂通过云台装夹固定在与水平桌面形成45°夹角的铝型材直杆上,完成机械臂以及夹爪的相应动作[3]。舵机组1驱动机械爪在平滑的导轨上做直线运动,实现对魔方的夹紧与松开;舵机组2通过连接轴承,带动云台转动,实现机械臂的转动,进而实现魔方的回转。
2.1 机械臂的结构设计
机械臂由云台搭建作为固定底座,分别用4个长螺钉均匀的分布在云台面,连接云台以及轴承盘,2个轴承盘通过4个长螺钉连接,将轴承固定装夹在中间,舵机通过法兰盘与下端轴承盘连接,上端轴承盘通过2个直角底座连接着机械爪夹持器。舵机转动带动下端轴承盘转动,夹在中间的轴承支撑着机械臂旋转,降低了机械臂在转动过程中的摩擦系数,从而保证了机械臂在魔方复原转动过程中的回转精度。下端轴承盘运动带动着上端轴承盘运动,从而带动着由直角底座连接着的机械爪夹持器一起运动。

图2 机械臂实物图

图3 单个魔方夹爪
2.2 夹爪设计
魔方的还原通过对机器人机械爪进行平移、旋转和开闭3种动作来实现[4]。对于抓取魔方的夹爪设计,传统的魔方还原机器人多选用五指结构,但其结构复杂,稳定性差,本文设计的魔方还原机器人采用二指结构,力量调节更方便,结构更简单,自身转动惯量较小,质量分布较均匀,更适合一边转动一边抓取。
夹爪材料采用PLA材料3D打印完成,夹爪内侧设还计了1个定位凸台,从两侧支撑魔方,从而减小因魔方自重在转动过程中产生的误差,保证夹爪在夹取和松开时,魔方的准确位置。夹爪工作时舵机带动联杆转动,进而驱动2根机械手指在导轨上滑动,实现机械手指的夹紧和松开动作[5]。
2.3 框架的设计
整体框架由底座和机械臂支撑杆构成,框架材料选用工业铝型材(图4和图5),外观精致,环保耐脏,质量轻巧,拆装灵活,方便携带。相比传统魔方还原机器人笨重且难以拆装的钢材框架[3],本文阐述的机器人体型更轻巧,机构更简单,易于拆装携带,便于流动展示。
该魔方还原机器人底座在机械结构中最主要的作用就是作为整体承压,承受上层机械传递来的较大的力,并且将传递来的力传导出去,起到承压和保护的作用。该底座是由8根铝合金JL-8-3030EL,铝型材选用BET-SB3030-8角码螺钉连接固定[6]。利用三角形固定原理,使云台底座更加稳固,坚定,耐压。

图4 工业铝型材

图5 底座
机械臂支撑杆通过角码两两连接,构成1个正方形。将正方形竖直放置,使其中1条对角线垂直于底座,2条支撑杆满足垂直条件,且与水平底座分别呈45°夹角,保证机械臂固定后,双臂呈正交结构。
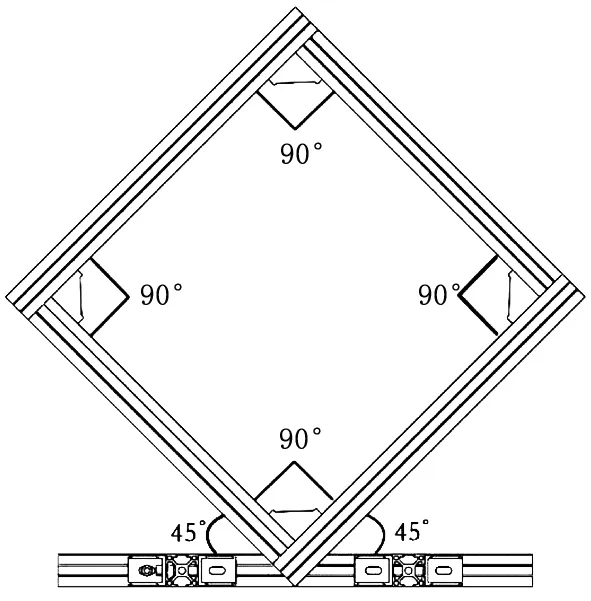
图6 框架
2.4 轴承的设计
轴承的选择需要根据轴承受力情况选择轴承类型。本文设计的魔方还原机器人轴承只连接了上下2个轴承盘,轴承在轴向和径向方向上均受到载荷,受载荷较小;当上位机解析出魔方还原步骤,芯片驱动下位机工作,工作过程中,2个机械臂处于高速运转当中;基于上述载荷条件要求,轴承基本类型采用滚动轴承,轴承工作转速高,故选择深沟球轴承。如图7所示。
舵机盘直径D1=120 mm,预留20 mm作为螺孔固定使用,选择轴承外径D=95 mm,内径d=75 mm,查表GB/T276-1994得选用深沟球轴承1180815K(国内新型号61815-2RS),宽度B=10 mm,额定动载荷Cr=12.5 kN,额定静载荷Cor=12.8 kN。选择润滑剂时,考虑轴承内圈与空气接触,油润滑会导致运动黏度过高,不利于轴承的高速转动,故润滑方式采用脂润滑,润滑剂采用通用锂基润滑脂(GB/7324-2010)2号,熔点不低于175℃,适用温度在-20~120 ℃范围[7]。
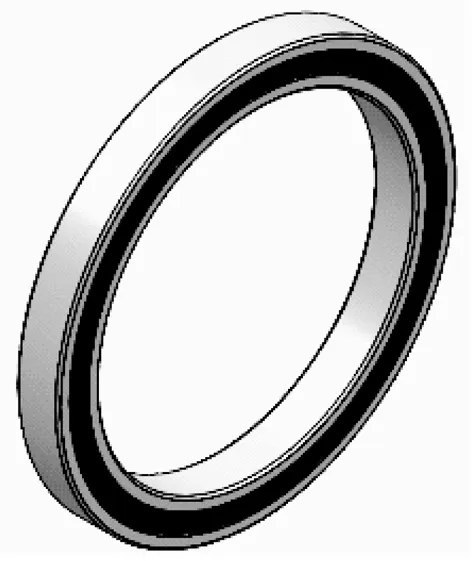
图7 轴承
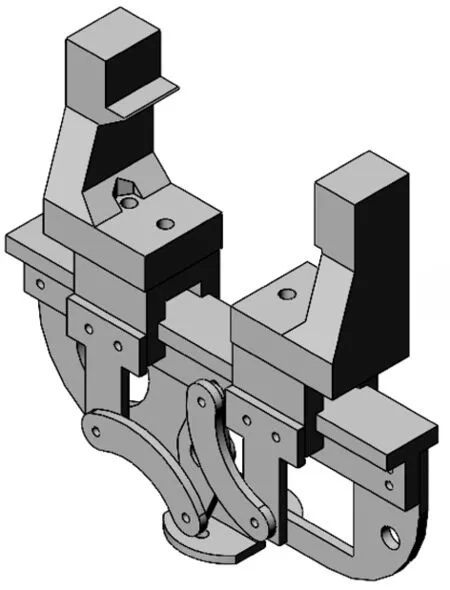
图8 二自由度机械臂夹持器
2.5 二自由度机械臂夹持器的设计
二自由度机械臂夹持器如图8所示,是基于同类夹持器的结构差异[3,8],综合了多款夹持器的优点,创新性的融合了一些新的元素。支持单夹持和手腕转动+夹持两种运动方式。夹持器的舵臂,水平滑轨,固定滑块和夹爪都采用了加厚具有加强筋构造的工程塑料,整体强度和刚性都大大提高,造型美观且经久耐用。
夹持器的开距离为0~53 mm(未加增宽器),质量为72 g,固定螺孔适用于各类标准件螺钉螺栓,配件方便。夹持器平行夹持工作时,它具有更大的开距和可延展性,能够更容易定位魔方的位置。
3 结束语
本文在STC15W系列LAP 15W8K61S4芯片的单片机系统上设计完成了整个魔方还原机器人,详细研究了其重要零部件的机械结构,材料工作原理以及工作环境。在各种创新结构的基础上设计出了体积小、响应速度快,操作系统稳定的机械结构,让魔方还原机器人的能够在各种不同的复杂环境也能快速地将魔方复原。该机器人成本较低,性能稳定,普及性广,魔方机器人的结构也可以应用在其他领域,适用性强。