智能水果采装运一体机设计与应用
2020-02-24闫亚龙刘广桥
闫亚龙 刘广桥
摘 要:据统计,水果采摘作业所用劳动力占整个生产过程所用劳动力的33%-50%,采摘作业比较复杂,若使用人工采集,不仅效率低,而且容易造成果实的损伤。而且大部分果树较高,人们采摘时存在困难及危险。鉴于此,本文设计了一种智能水果采装运一体机,采摘水果速度快,效率高,同时避免了对果实的损伤,给农民采摘水果带来了巨大的方便。
关键词:水果;采装运;智能;设计
一、智能水果采装运一体机设计背景与目的
据统计,水果采摘作业所用劳动力占整个生产过程所用劳动力的33%-50%,采摘作业比较复杂,季节性很强,若使用人工采集,不仅效率低、劳动量,而且容易造成果实的损伤。而且大部分果树较高,人们采摘时存在困难及危险。有鉴于此,针对现有的问题予以研究改良,提供一种智能水果采装运一体机,旨在通过该技术,达到解决问题与提高实用价值性的目的。
二、智能水果采装运一体机的设计与应用
(一)智能水果采装运一体机的设计
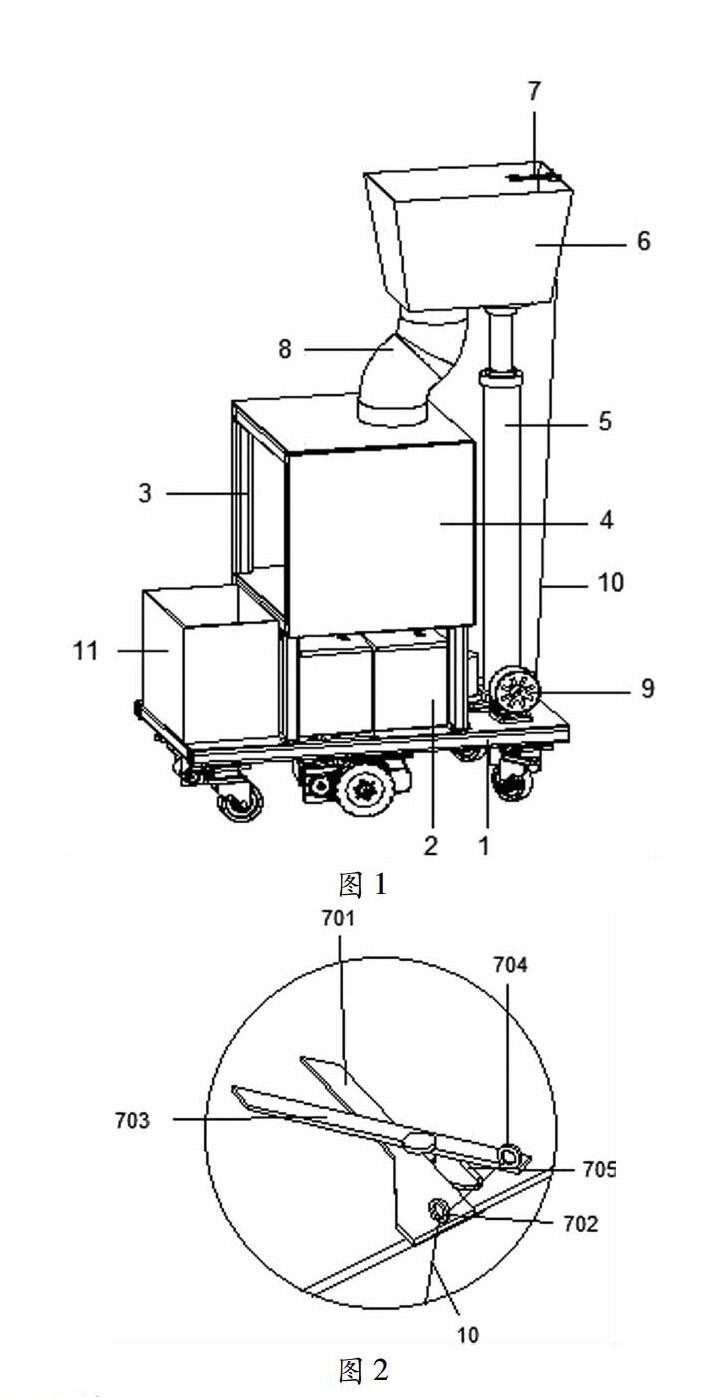
本设计一种智能水果采装运一体机,包括:智能遥控底盘车1、蓄电池组2、支架3、自动打包机4、推杆5、接料斗6、特制剪刀7、输料筒8、收绳器9、细绳10、包装箱11、固定剪刀体701、导环702、活动剪刀体703、挂环704、弹簧705;支架3通过螺栓固定安装在智能遥控底盘车1的上方,且蓄电池组2固定安装在支架3的底部;自动打包机4安装在支架3的上部;推杆5通过螺栓固定安装在支架3的一侧;特制剪刀7通过焊接方式固定安装在接料斗6的顶端;特制剪刀7由固定剪刀体701、导环702、活动剪刀体703、挂环704、弹簧705组成;固定剪刀体701通过焊接方式安装在接料斗6的顶端,活动剪刀体703通过铰接方式安装在固定剪刀体701的上方;弹簧705设置在固定剪刀体701、活动剪刀体703之间;收绳器9通过螺栓固定安装在智能遥控底盘车1的上方;细绳10的一端缠绕固定在收绳器9上;接料斗6与自动打包机4通过输料筒8连接;包装箱11放置在智能遥控底盘车1的上方。一种智能水果采装运一体机的整体方案如图1所示,图2为特制剪刀7的具体设计方案图。
(二)智能水果采装运一体机的工作原理与应用
将包装箱11放置到智能遥控底盘车1的上方,智能遥控底盘车1在工人的控制下进入采摘区域,执行采摘命令后,推杆5推动接料斗6上升,直至特制剪刀7能够接触到水果,色彩传感器能够自动识别定位水果位置,并判断水果的成熟度,红外线感应器精確测得水果的果梗处,然后收绳器9运行,对细绳10进行收卷,通过细绳10拉动活动剪刀体703,将水果剪下,水果落在接料斗6内,并通过输料筒8输送至自动打包机4,水果套袋之后用热熔丝将剩余网袋熔断,套袋后的水果将成功落入包装箱11中,收绳器9反转,活动剪刀体703在弹簧705的作用下回弹,再次进行采摘作业,直至完成。
(三)智能水果采装运一体机的优点
本设计一种智能水果采装运一体机,通过推杆为电动伸缩杆,且接料斗通过推杆设置为升降装置的设置,采用伸缩杆的设计可以完全代替工人通过爬梯来采摘水果所带来的不便,并且可根据果树的高低自动调节,灵活方便,安全系数高,降低安全隐患,同时减少工人工作量,提高采摘效率;通过活动剪刀体通过铰接方式安装在固定剪刀体的上方,且挂环通过焊接方式设置在活动剪刀体的后端,弹簧设置在固定剪刀体、活动剪刀体之间的设置,通过特制剪刀将水果剪下,提高采摘效率,节省了人力,同时避免损伤水果;通过输料筒为圆筒状的布袋,且输料筒的顶端套入固定安装在接料斗的底部,输料筒的底部套入固定安装在自动打包机的顶部的设置,通过布袋进行运输,保护效果好,防止水果磕碰,减少了水果的破损。
三、总结
通过对智能水果采装运一体机的改进,具有结构设计合理,采用伸缩杆的设计可以完全代替工人通过爬梯来采摘水果所带来的不便,并且可根据果树的高低自动调节,灵活方便,安全系数高,降低安全隐患,同时减少工人工作量,提高采摘效率,减少了水果的破损的优点,从而有效地解决了现有的问题和不足,具有极大的推广价值。
参考文献:
[1]赵松年.现代设计方法[M].北京:机械工业出版社,1996.
[2]王勋成.有限元基本原理与数值方法[M].北京:清华大学出版社,1998.
[3]易文星.机械设计自动化设备安全控制分析[J].低碳世界,2017(06).
[4]孟兆生,岳彩霞,孙建华,刁国强,周英鸿,王亮,郭凡.工程训练中心应对工程教育专业认证的策略与思考[J].黑龙江工程学院学报,2018(03).
作者简介:闫亚龙(1996-),汉族,甘肃定西人,本科,学生,研究方向:石油工程。
