智能微电网控制技术研究
2020-02-24曹莹高云峰
曹莹 高云峰

摘 要:微电网系统由多个小型分布式发电系统组成,可以解决其与大型电网连接后对大型电网的影响。微型电网在运行时,不仅可以与大型电网同时运行,而且在电网系统受损或需要维修和保养时,并且能在断开大电网之后继续独立运行,体现了系统的可靠性、稳定和灵活性。
关键词:分布式发电;电力电子变换电路;微电网;控制技术
随着经济的迅猛发展,化石能源的紧缺问题和环境保护问题引起大家的关注。传统的大电网模式在运行中暴露出很多问题:如供电系统的稳定性不高、可靠性不强等。因此,人们也越来越多的重视和关注利用可再生清洁能源发电的分布式发电。分布式發电的优点是:环境污染少、工作可靠性高、安装便捷、能源利用率高,但大量的分布式电源接入对大电网带来冲击性,对电网的电能质量造成影响,同时还给电网的调度带来不利。分布式电源对大电网来说,就是一个不可控电源。为协调大电网与分布式发电之间的矛盾,微电网应运而生。
微电网是把分布式发电单元、控制装置、储能装置、用户负荷进行有机的组合,使之形成一个单一的、微小的、可控的电力网络。微电网不仅解决了分布式能源接入的问题,还充分利用了分布式能源的节能、环保、高效、灵活的优点,并且能够为用户提供不同的供应需求和供电质量。因此,微电网成为大电网的重要补充,也是智能电网的一个重要组成部分。
1 微电网系统结构
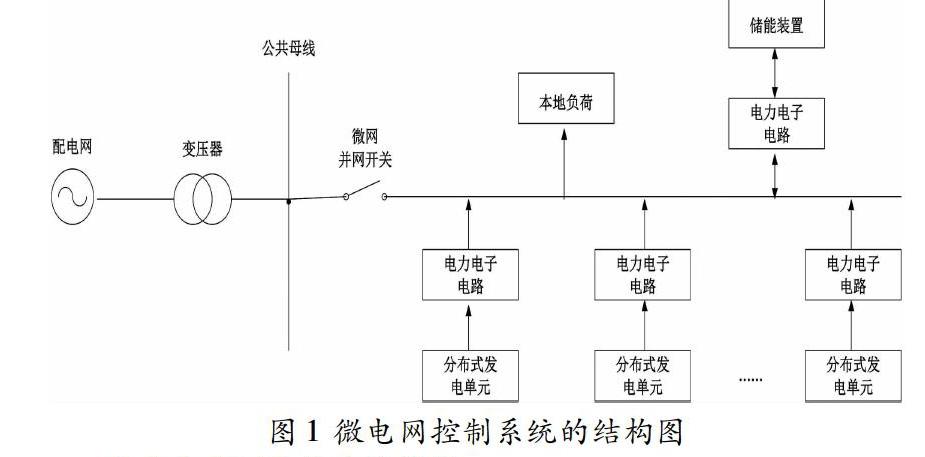
微电网控制系统包括配电网、变压器、公共母线、微网并网开关、分布式发电单元,电力电子变换电路、储能装置及一般负荷,如图1所示。一般分布式发电单元由太阳能光伏发电系统、风力发电系统、燃料电池等组成,电力电子变换电路由DC——DC、DC——AC电路构成,储能装置一般为蓄电池,一般负荷为实验负荷和本地负荷。当公共母线上的静态转换开关闭合时,微电网处于并网状态,这时,微电网将多余的电能送至配电网的各处,或当微电网电能不足的时候,由配电网进行补充,使得微电网和配电网进行能量的交换,实现了能量的最大化利用。当配电网出现故障需要维护或者电能质量不符合要求时,将静态转换开关断开,微电网处于独立运行的状态,由微电网自行向本地一般负荷供电,保证负荷持续稳定的运行。当微电网电能不足,所有负荷无法同时运行时,一般要切除二级负荷来保证一级负荷的稳定运行。
2 电力电子变换电路设计
这里的分布式发电单元由光伏发电系统构成,光伏发电系统输出的电力电子变换电路包含DC——DC、DC——AC电路,如图2所示。由于光伏发电系统输出的是不稳定、比较低的直流电压,必须首先经过DC-DC稳压后,再经过DC-AC,实现逆变,输出稳定的交流电送到母线上。为了最大限度利用资源,采用带有MPPT跟踪的功率控制方式,保证光伏发电系统输出最大功率。
前级为DC——DC变换电路,作用使得光伏发电系统输出的电压更稳定,范围更广,提高对外界的适应能力,并具有MPPT控制功能。DC——DC直流电路采用Boost型直流变换器。
MPPT具体控制方法:根据光伏系统输出的电压u和电流i,计算出功率P,送到MPPT模块,计算出光伏阵列的输出功率,通过MPPT算法找到光伏阵列的最大工作点,调节功率变换元器件使得光伏阵列的输出功率保持在最大值。
后级DC-AC电路的作用是把前级DC-DC变换后输出稳定的直流电进行逆变,转换为与电网电压同频同相位的交流电,向本地的一般负荷供电,同时接入配电网,逆变电路还能保证公共母线电压恒定。滤波电路采用LC滤波器,满足并网谐波要求。
3 微电网的控制策略研究
当微电网通过逆变器连接到大电网时,通过控制系统来控制和调节逆变器,而且微电网的运行能力也是由控制系统决定的。孤岛和并网两种状态是微电网主要的运行状态,在两种不同的微电网运行状态下,采用不同的控制方法对逆变器进行控制。目前,微电网逆变器的控制方式有三种:并网时功率控制(P/Q)为常用的方式、孤岛运行时则采用比较稳定的恒压恒频控制(U/f)和下垂控制(Droop)。
3.1 PQ功率控制策略
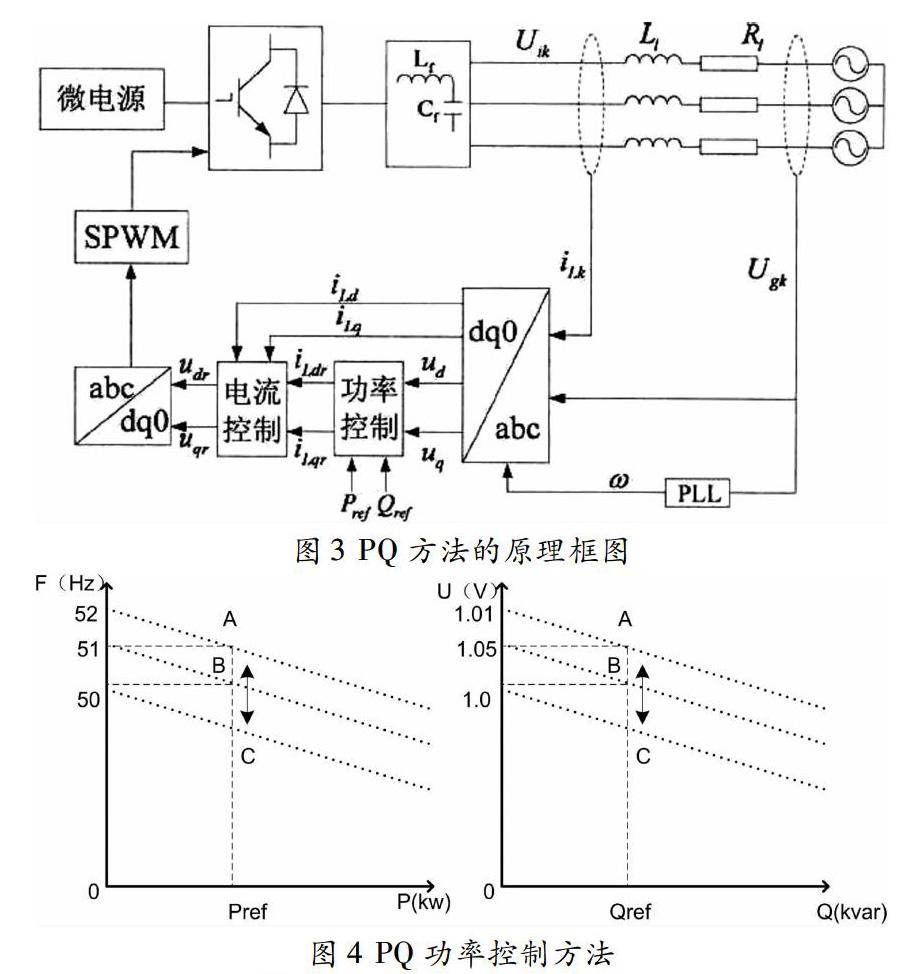
微电网在并网运行时,一般用P/Q来进行控制的,通过给定的有功功率和无功功率的信号来进行自动调节,直到目标值达到,同时大电网的频率和电压也将被跟踪。系统原理图如图3所示,图中的微电源为直流电源,Lf和Cf分别为滤波电感和滤波电容;Ri和Li分别为线路电阻和电感;逆变器的输出电压、输出电流分别是Uik,Ilk,大电网的电压为Ugk。
功率控制方法如图4所示:有功功率在电网中的控制是需要调整频率的下垂曲线,使得光伏发电系统有功功率输出值保持在参考值上下;而无功功率的控制是需要调整电压的下垂曲线,使得光伏发电系统无功功率输出保持在参考值上下。微电网工作在B点,即正常运行时,此时系统的频率、电压为额定值,系统电源的输出功率与负荷消耗的功率基本平衡。若系统受外界影响,频率升高,相应的幅值也升高,系统的工作点就会由B点向A点移动,虽然频率增加了,但输出的有功功率和无功功率保持不变;如果系统频率降低,幅值也降低,系统的工作点就会由B点向C点移动,频率减小,但输出的有功功率和无功功率也始终保持恒定状态。
3.2 U/f控制策略
当微电网处于孤岛运行状态时,一般采用U/f(电压/频率)控制策略,可以输出一个稳定的电压和频率,并且能够让系统的输出功率满足负载变化的需求。图5为控制原理结构框图。系统的电压和频率进行反馈调节之后,得到的值和实际的测量值进行比差,再经过PI调节,最后使得实际的电压和频率跟随给定值变化,最终实现恒频、恒压的控制。
控制方法如图6所示:正常运行时,微电网系统的工作点在A点,电压、频率为额定数值,对应的输出功率是有功功率P2)和无功功率是Q2,当负载减小时,工作中心点是由A点向C点移动,输出的有功功率和无功功率都变小,但系统中的电压、频率还是额定值,保持不变;当负载增加时,操作点从A点向B点移动,输出的有功功率和无功功率都变大,而系统电压和频率依然保持不变。因此,恒压和恒频(U/f)控制可以提供稳定的系统和恒定的电压和频率。
3.3 下垂控制
通过下垂控制,得到了各个逆变器输出的电压和频率值,各自反相微调,使得系统的有功功率和无功功率得到合理分配。原理框图如图7所示,整个系统为三环结构,包括电压电流双环和一个功率环。具体控制方法如下:当逆变器输出的有功功率偏大时,调节频率下垂特性,使得输出频率减小,进而使得有功功率减小;当逆变器输出的有功功率偏小时,调节频率下垂特性,使得输出频率增大,进而使得有功功率增加;当逆变器输出的无功功率偏大时,调节幅值下垂特性,使得输出幅值减小,进而使得无有功功率减小;当逆变器输出的无功功率偏小时,调节幅值下垂特性,使得输出幅值增大,进而使得无功功率增加。
在实际系统中,微电源可以由光伏阵列、风力发电系统、燃气发电机、燃料电池等构成,由于这些微电源的差异性比较大,因而在控制方式上必须采取不同的控制方法,才能保证系统的稳定运行。一般来说,对于燃气发电机和燃料电池这些发电方式,可以采用下垂控制,对于光伏阵列,一般采用PQ控制。当微电网工作在两种模式之间的切换状态时,如何实现两种模式的无缝切换、维持系统稳定是控制的关键。
4 结论
微电网的出现解决了分布式发电的接入问题,他在提高电系统可靠性、降低能耗和靈活性等方面又具有非常大的潜力。微电网既可以孤岛运行,又可以并网运行,在恶劣天气下,还能保证对用户供电。微电网在满足多种电能质量要求和提高供电可靠性等方面有诸多优点,使它完全可以作为现有电网的一个有益、必要的补偿。
参考文献:
[1]于文涛.智能微电网关键技术研究[D].沈阳:沈阳理工大学大学,2012.
[2]吴忠强.现代控制理论[M].北京:中国标准出版社2010.
[3]纪明伟.分布式发电中微电网技术控制策略研究[D].合肥:合肥工业大学,2013.
[4]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2016.
[5]杨文杰.光伏发电并网与微网运行控制仿真研究[D].成都:西南交通大学,2010.
[6]陈达威,朱桂萍.低压微电网中的功率传输特性[J].电工技术学报,2014,12.
[7]郭诚.微网逆变器的双模式变换控制研究[D].安徽:安徽理工大学,2016.
课题项目:2019江苏省高等学校大学生实践创新训练计划项目(课题编号:201910958002Y)的研究成果
作者简介:曹莹(1972-),女,江苏南通人,工学硕士学位,副教授,研究方向:新能源应用技术和职业教育教学研究;高云峰,男,学生。
