基于DSP的步进电机控制系统设计研究
2020-02-20韩英永
韩英永
(国防科技大学电子对抗学院,安徽 合肥 230037)
1 步进电机控制模块概述
步进电机依据构造、原理可分为反应式、永磁式、混合式3种,其中混合式步进电机的性能(输出力矩、频率范围、振幅及电感)具有明显的优势,因此本文以混合式步进电机为例,对其进行设计研究。
混合式步进电机可实现永磁式的工作特性,是因内部磁路内装有永磁铁,以此保证设备的定向工作特性,其工作原理主要是通过电流输入到设备中,由绕组产生的磁动与永磁铁产生磁动势的矢量和来完成相应的动作指令。混合式步进电机的主体参数一般包含定子、转子、步距角、齿距角、转矩、频率、转速、电流及电压等。
步进电机在运行过程中一般分为静态转矩、动态转矩以及暂态转矩3种。静态转矩是转子转矩与功率角之间的正态分布特性,当电机接入电流后,系统内部在永磁铁的作用下,磁密将呈正弦波,在理论值的基准下,波形将与转矩呈正比,但在实际齿槽转矩的作用下,系统的转矩将出现一定的误差,进而产生谐波影响。动态转矩则是以脉冲频率为衡量基准,分为转矩特性与惯量特性两种。转矩特性的关联参数为脉冲频率的响应时间与动态转矩,动态转矩是在失步转矩与牵入转矩共同作用下而产生的,当脉冲频率为0时,失步与牵入所产生转矩值量则为定值;当脉冲频率逐渐上升时,系统运行的负载能力则呈现出现下降趋势;此过程也是大转矩的获取过程,在低速条件下,可有效减短实际加速时间。惯性特性则是以电机的初始速度为主,然后在通过惯性条件来维持自身的运行模式,但在负载惯量持续增高的过程中,电机设备的起始频率将下降。暂态转矩是指在转子惯量的条件下,设备空载模式下将产生具备衰减特性的超越角,当动态角最终稳定在某一个角度下,此过程为暂态特性,其角度稳定时间与设备性能的关联性较大,稳定时间越小则代表电机的性能越好。
2 步进电机驱动原理及实现方式
2.1 驱动原理
步进电机在运转过程中,以内部驱动系统来实现功能化操作,其主要是通过电流对步距角进行细分,实现原理主要包含电流细分、步距角细分两种。电流细分是对输入相位的电流值进行研究,此过程不考虑转矩的影响方式,当相位通电后,可依据系统内部电流传输特性进行分类,但由于步距角的分布形式属于动态,此种电流细分形式未能对分辨率进行细化,进而影响系统内的运行精度。步距角细分是依据磁场的总体情况,当电机想要实现均匀化控制,则需对系统内部电流的传输形式进行正确划分,确保每一相位所产生的幅值为定性基准,并保证脉冲产生的角位属于均匀变化过程。当磁场产生矢量和属于基准值时,可为脉冲切换提供缓冲平台,令电流可部分作用于绕组中,以实现动态化控制,进一步细分步距角,令其产生阶梯波,进而与转子的转数进行同步。
2.2 实现方式
步进电机的实现方式包含PWM与SPWM两种,但由于SPWM在控制过程中计算程序较为复杂、占用空间较大、实现路径较为繁琐,所以本文采用PWM调制。PWM调制是以控制电压的形式来实现电流的同步操控,其硬件实施条件是以逆变开关为主,通过开关量的调节,令脉冲的幅值输出达到基准值,进而使其可替代波形完成相应的工作指令。例如,在对正弦波进行替代时,由于电流输出周期内将产生一定数量的脉冲,通过PWM波的替代,可令系统获得连续输出值,并减少谐波所带来的影响。PWM在进行调制时,一般是按照基准值的设定来对脉冲的实际宽度进行优化调整,如对系统电路进行调压、调频等。同时,PWM调制被称作面积同效,即在同等面积的脉冲下,脉冲形状不同,但在惯性力的影响下,其整体产生的效果是一致的。PWM调制具有易操控性、精准性等优势,可将其作为步进电机的调制基准。
3 步进电机控制系统软件设计
3.1 软件开发环境
本文采用控制芯片为TMS320F系列,软件开发环境为CCS。数字信号处理的开发环境包含非集成式与集成式两种。非集成式开发环境工作形式较为独立,导致数据共享效率存在一定的局限性,在经济、工艺角度来看,开发效率较低;集成式开发环境则具备较大的工作容量,可对数据信息进行高效率分析,与非集成式开发环境相比,在经济以及技术层面具有较大的优势。
CCS可为系统提供一体化平台,包含程序的建立工具、配置、优化、分析、全过程监督等,以确保工作人员可对程序进行多功能操作。CCS代码生成模块包含编译器,可将系统的编码译为源代码;汇编器则对系统的源文件进行自主识别,确保其可被机器设备进行识别;连接器是一种指向型模块,可将系统与目标文件进行连接,并依据系统当前的工作情况进行自动调节;归档器是对系统内运行的文件进行采集,并可对数据库中的文件进行删减、增加、替换等操作;指令转换程序是对源文件中的程序进行标记,并将其转换为数字指令;数据库运行是为设备的接口函数、运行函数、程序函数等提供平台;交叉列表是对列表文件中的程序进行精准定位,确定符号的最终显示位置;绝对列表可将输出文件进行转变,并对文件进行汇编,确保列表文件中含有绝对地址。
控制芯片在对软件程序进行控制时,其C语言程序文件应以c类型、ASM类型、b类型、CMD类型为主,以保证系统可实现C语言控制、节约空间、提升速度、重复分配、指向型命令等。CCS运行步骤为文件导入—自动配置—程序识别运行—程序下载,通过文件在系统中周期性运行,可不断对自身程序进行调整,以满足系统的工作需求。
3.2 软件系统设计
3.2.1 主程序设计
在对主程序进行设计时,由于属于逻辑性控制的一种,程序在运行过程中,各项操作模块应处于初始化位置,当程序的指令依次下达后,各项操作模块依据上位操控系统的指令下达来对电机的运行模式进行操控。通过顺序性的操控模式,可将各项指令逐层下达,进而确保系统运行的完整性。在对主程序设计时,将中断的软模式与硬模式结合,可减少系统运行所受的干扰,并为信号提供实时传输的保障。若程序运行失败,则可通过下一循环的中断模式进行自动恢复,其程序设计如图1所示。
3.2.2 子程序设计
子程序设计是以模块形式为主。首先,通用型接口(GPIO)在设计过程中,主要是对多路径选择器、寄存器等进行设计,以决定接口引脚的配置形式,其他设计形式则与单片机相似。其次,PWM程序设计。PWM波的主要是由管理器来决定的,波形的产生形式一般以定时器为主,以寄存器与输出逻辑为载体,进而对PWM波进行输出。PWM波程序设计如图2所示。

图1 主程序设计图(喂狗代表一种输出型定时器)

图2 PWM生成程序
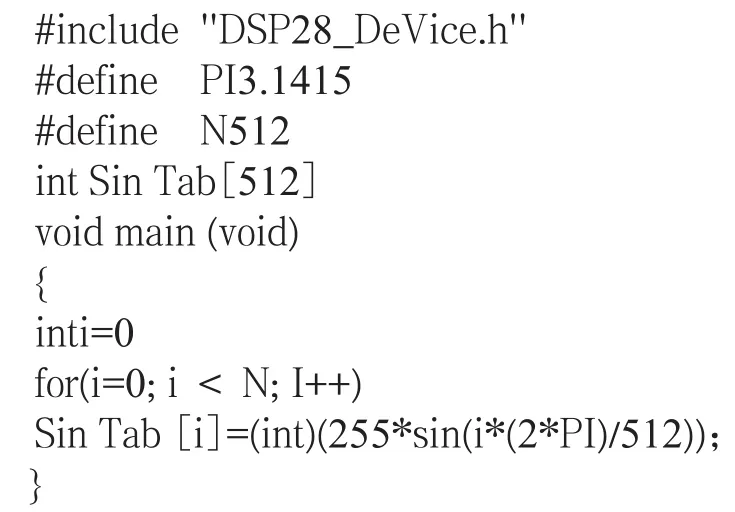
PWM波在输出过后,将立刻进入下一循环周期,系统的时钟初始化应为80 MHz,定时器的基准因子为1,程序的计数周期为1/38 μs,以保证定时器中断时间内波形的低电平位处于有效状态。再次,正余弦函数基准制定。当系统的各项值量范围确认后,还应对给电流的细分形式进行确认,以满足步进电机的控制需求。为保证正余弦函数的计算时间可与系统响应时间相一致,应将正余弦函数计算表存储在芯片的系统中。通过此种方法,可保证确定电流时,只需要通过地址的输入,便可得出电流细分的程度。因此,在利用数字信号控制进行系统契合时,字长选取长度为8位(字长选取长度越长,则代表实际测量值精度越高),定点数标值为Q7。由于本文采用的最大细分程序为128位,即正弦波被分成128个节点(1/4正弦波所产生的),因此正弦函数表的512节点程序设计如下:
最后,串行通信接口(SCI)是实现模块之间的信息传递,以保证系统运行的流畅性。本文采用的设计模式为全双工形式,在SCI的缓冲型工作模式下,可确保系统的信息接收以及发送功能处于实时状态。SCI设计流程如图4所示。串口通信接口的波特率为9 500 b/s,通信数据格式为1位、数据位为8。
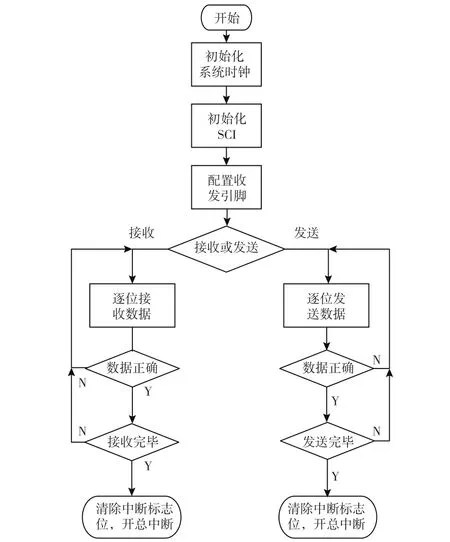
图3 SCI流程图
4 步进电机控制系统硬件设计
4.1 整体架构
步进电机控制系统硬件的整体架构如图4所示,可分为主操控系统、转换系统、逻辑电路模块、保护电路模块、驱动电路模块及检测电路模块[1]。通过上位机与控制芯片进行信号的反馈式传输,并由逻辑电路模块对信号进行综合,驱动电路模块提供信号源。转换系统对芯片的细分值信号进行转换,并与保护电路模块的电流进行综合,以实现防护作用。检测电路模块的相位电流检测模式,可将电路进行放大,并与DSP系统的加载电流、电压进行比对,若电流、电压传输范围小于DSP系统的基准值,则设备可进行正常工作,反之则自动停止工作[2]。

图4 步进电机控制系统硬件的整体架构
4.2 外围电路
外围电路一般包含电源电路、时钟电路、复位电路及串口电路等。DSP系统的供电形式较为复杂,依据其工作模式一般以多电源供电为主。由于接口的供电电压为3.3 V、系统自身的内电压为1.8 V、基准供电压为5 V,因此需通过电压转换装置实现电压值的转换[3]。时钟电路则是一种信号定位系统,一般由晶体振荡器和时钟源组成。本文时钟电路则是以晶体振荡器为主,外部振频为35 MHz,最高可拓展为10倍。复位电路则是采用传统的手动复位模式,结合RC电路来实现复位操控。串口电路的位电平平衡芯片采用的MAX3131型号,具有低功耗、高性能、高精度等优势,可有效实现系统的位电平转换。
4.3 逻辑电路
逻辑电路是对系统产生的PWM波与相位信号进行综合,由于逻辑顺位形式较为简便,本文采取的逻辑器件则以双列直插式逻辑门进行设计,以简化设计步骤。逻辑门的内部工作形式如图5所示,此类逻辑中的A引脚分别对应PWM波,(即A1对应PWM1,A2对应PWM2,以此类推),B引脚对应相序信号,通过两路信号的同步进给,可形成斩波信号,以对后期程序的开关量进行控制。当PWM信号、相序信号结合时,可依据DSP系统对电机设备的开合形式进行控制。
4.4 转换电路
转换电路是对细分值进行信号转变,由于上位系统传递下来的是8位值,因此需依据信号的传输形式采用双电路转换模式,以确保系统中的正余弦函数存储量可进行正常读取。由于转换电路的工作电压为15 V,与其接触的关联电容应设定为平等值,以保证电路系统正端与负端可实现等压条件下的同步运行[4]。
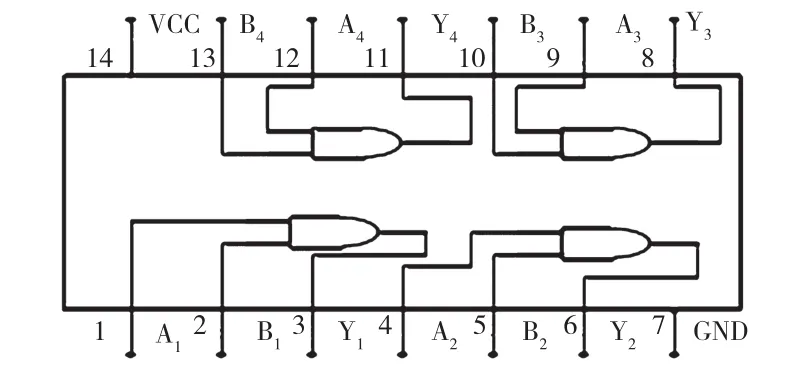
图5 逻辑图示
4.5 驱动电路
系统的驱动电路是由两种芯片进行联合驱动(L6506、L298),其连接形式如图6所示。其中L6506芯片起到模拟量的连接作用,确保DSP系统内函数表转换量的接收形式,内部的5~8引脚则是对主控制芯片的斩波信号进行接收;4号位引脚与通用型接口相连接,令其接收PWM波周期变化内的电压位值,以实现持续性供电,进而减少系统运行的损耗,减低内部能量变动所形成的谐波干扰;芯片的下位引脚(10、15)则是通过电路放大与芯片L298相连接,以接收芯片的反馈信息。在反馈信息的作用下,当反馈电压值与基准电压值相符时,芯片将进行自动复位。此时功率开关也将处于断开状态,周期运转内的电流呈衰减趋势,然后进入下一循环周期,以实现绕组细分。
4.6 保护电路
保护电路的设计原则是以系统内部低电压为基准,通过芯片的反馈形式来进行自动化切断,以保证系统的安全运行[5]。文中的芯片联合工作形式所提到的反馈信息等压模式,则为整体电路提供防护作用,其内部电阻反馈形式一般以电流值为主。因此,保护电路的设计可由电压防护方面入手,通过电压值的设定来对电路进行间接保护。传统的保护电路一般以放大电路为主,在基准值的设定下,依据反馈信息来对系统的运行模式进行控制。此种保护方式是按照电路的基本运行模式为主,但在实际操作过程中,将增加系统运行的负担。因此,保护电路的设计则是以L6506芯片为主,通过内部信息的传导来实现系统的判定,以对高电流的输入量进行有效限制。

图6 两种芯片的连接形式
4.7 自检电路
自检电路采用的是光电编码器,为信号的传输模式提供参考值,以减少系统的电磁干扰。光电编码器通过接口对上位系统的输入波形进行隔离,使模拟信号可在系统中正常运行,进而实现DSP系统的对接传输[6]。数字模拟信号系统中的定时器可对脉冲的数量进行获取,为定时器提供数值基准,进而为系统周期性运转提供时间值,以决定步进电机的步距角、转速等。
5 结 论
文章对步进电机的控制系统进行了概述,通过驱动原理以及实现方式对步进电机的模式进行了研究,并对步进电机控制系统进行了硬件与软件方面的设计。在软件设计方面,主要通过主程序与子程序的设计来提升步进电机系统运行的流畅性以及数据信息传输的精准性;在硬件设计方面,则是通过各项电路模块、通信接口、硬件驱动等来对电流及信号的传输模式进行规划,以确保数字信号可与操控指令形成精准对接,进而提升系统运行的质量。