基于STM32的智能除草机器人设计*
2020-02-20张丽慧尹序臻江永鑫荆汝铎
张丽慧,尹序臻,江永鑫,荆汝铎
(厦门理工学院 电气工程与自动化学院,福建 厦门 361024)
随着社会的快速发展,使得原本从事农业生产的劳动力逐步转向其他行业[1],加之在我国当前阶段中农村人口老龄化问题逐渐加重,导致农村劳动力数量逐渐的减少,对农业生产正常的进行造成了严重影响,不利于我国农业的发展[2]。另外,采用人工或者除草设备在农田除草,劳动成本高且效率低下,不利于农业生产的进行。为提高农业的经济效益,发展现代化精准农业是必然选择的途径,而农业除草机器人就是精确农业(Precision Agriculture)在农田除草上一个重要应用,也是未来农业发展的必然途径[3]。
随着机器视觉技术的发展及其在农业上定位和识别领域的应用,基于机器视觉的除草机器人得到了很大的发展[4]。但现在国内外的大多数除草机器人都是采用喷洒除草剂的方式除草,对环境造成了一定的污染,也增加了农药残留。因此,很多国家已经颁布法令明令禁止使用化学除草剂[5]。
为解决以上问题,本文设计了一种智能除草机器人,利用图像识别技术和机械手准确定位技术进行除草,绿色环保,省时省力;另外,结合多种传感器,智能化程度高,保证除草的精度,大大提高田间作业效率。
1 系统整体设计
本设计以STM32单片机为控制核心。当机器人电源开启后,灰度传感器检测到路径发送信号给单片机,单片机输出指令给电机驱动模块,电机驱动模块发送高低电平至电机控制车轮转向;同时摄像头模块实时拍摄并进行图像处理,当识别到杂草并待其进入到视野中央时,摄像头模块发送停车信号给单片机;单片机通过电机驱动模块控制机器人停止移动,随后控制舵机使机械臂定距夹取杂草。此外,温湿度传感器在除草机器人工作时实时采集农田里的温湿度信息给单片机进行数据处理,并在LCD显示屏上显示;最后除草机器人在农田巡逻完毕后单片机会控制蜂鸣器发出警报。该智能除草机器人的整体结构如图1所示。
2 硬件设计
2.1 主要元器件清单
见表1。
2.2 整体硬件搭建
该智能除草机器人主要包括履带式底盘和多自由度机械臂,详见图2。
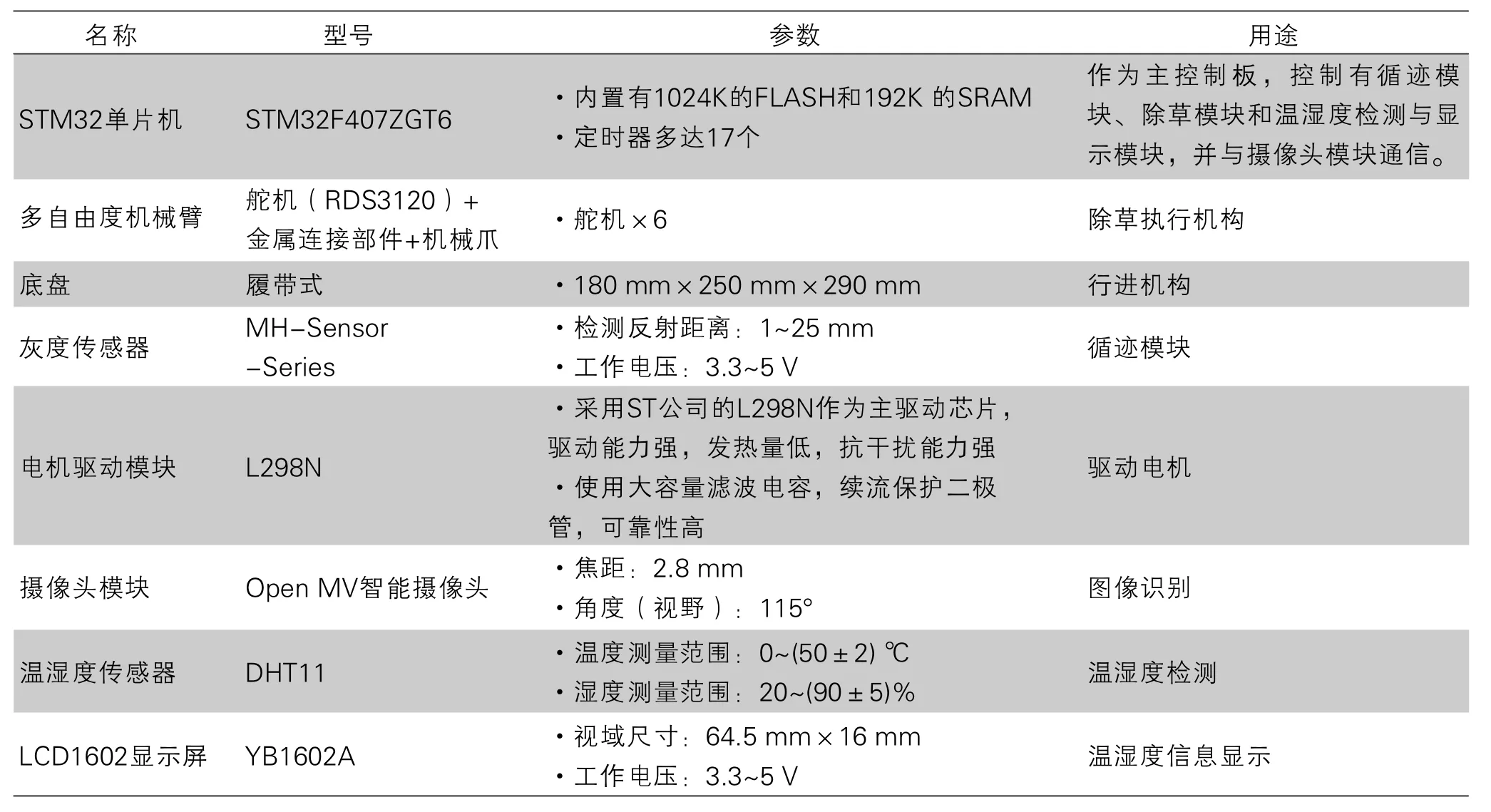
表1 除草机器人各硬件模块及其参数表
如图2、图3所示,履带式底盘包括上下底板、分别安装于底板两侧的履带组件以及驱动履带组件运动的电机。上底板放置有机械臂,下底板放置有STM32单片机、电池、电机驱动模块、灰度传感器(2个,并列安装于下底板前端中央)、温湿度传感器和显示屏。STM32单片机与机械臂、摄像头模块、电机驱动模块、灰度传感器、温湿度传感器和显示屏有电性连接。履带组件包括履带以及设置在履带内侧的主动轮和从动轮。
机械臂包括依次铰接的云台、第一旋臂、第二旋臂、第三旋臂和机械爪,如图4所示。第一旋臂通过第一舵机与云台连接。第一舵机设置在云台上,且云台驱动第一舵机绕竖向轴转动。第一舵机的输出端与第一旋臂连接,驱动第一旋臂绕水平轴转动。第二旋臂铰接于第一旋臂远离云台的一端,且二者的铰接处设有第二舵机,第二舵机驱动第二旋臂绕第一旋臂转动。第三旋臂铰接于第二旋臂远离第一旋臂的一端,且二者的铰接处设有第三舵机,第三舵机驱动第三旋臂绕第二旋臂转动。通过三个舵机对三段旋臂进行转动控制,使得机械臂能够实现类似人体关节的弯曲或伸展运动,便于控制机械爪靠近或远离目标物,动作灵活,操作方便。机械爪安装于机械臂端部,第五舵机可驱动其张开或闭合。机械臂末端还安装有摄像头支撑支架,摄像头模块就安装在支撑架上。
3 软件设计
软件部分主要由主程序、循迹子程序、除草子程序和温湿度检测子程序组成。
3.1 主程序
程序运行,进行摄像头、定时器中断与GPIO等模块的初始化,进入一个主循环等待中断的发生。主程序流程图如图5所示。
3.2 循迹子程序
如图6所示,使用定时器中断,每到给定时间进入中断。根据灰度传感器回传信号的变化判断机器人行进路线是否偏移,若偏移,通过电机的正反转调整机器人行进方向,调整后判断是否到达终点,是则停车并关闭中断,否则本次中断结束,等待下次中断。
3.3 除草子程序
如图7所示,进入中断,初始化摄像头,进行图像识别,判断是否发现杂草,若未发现则继续进行图像识别,若发现则锁定杂草。此时机器人继续前进,待机器人移动到最佳区域(摄像头模块识别到杂草后锁定其几何中心点,此点会随着机器人的前进移动,当其移动至摄像头所拍摄区域中央,即表示机器人移动到最佳区域)时停车并驱动舵机控制机械臂进行除草,除草结束后再次进行图像识别,若杂草消失则机器人继续行进并结束本次除草,否则再次进行除草。
其中,舵机的控制采用为50 HZ的PWM波。单片机通过调整输出信号高电平的占空比改变舵机的姿态角,多个舵机同时保持不同的姿态角为机械臂的一个姿态。机械臂的除草动作由不同的机械臂姿态连续变化而成。为此,设定5个机械臂姿态:
⑴ 归零姿态:抓取前与抓取后的姿态,此时舵机上的摄像头(摄像头模块装于机械臂末端舵机上)视角为垂直轨迹看向农田。
⑵ 前伸姿态:抓取过程的其中一个姿态,此时舵机前伸,摄像头视角保持不变,机械爪状态为张开。
⑶ 夹紧姿态:与前伸姿态相比较,此姿态保持其余舵机姿态角,仅将机械爪夹紧。
⑷ 拔取姿态:保持机械爪夹紧,机械臂由夹紧姿态向回移动,此姿态可将杂草拔出。
⑸ 松开姿态:机械爪松开,此姿态可使拔出的草掉落。
3.4 温湿度检测子程序
如图8所示,单片机发送一次开始信号后,DHT11从低功耗模式转换到高速模式。高速模式下,DHT11接收到开始信号触发一次温湿度采集,如果没有接收到单片机发送开始信号,DHT11不会主动进行温湿度采集。DHT11等待单片机开始信号结束后,发送80 us低电平响应信号,再发送出40 bit的数据(8 bit湿度整数数据+8 bit湿度小数数据+8 bit温度整数数据+8 bit温度小数数据+8 bit校验和),单片机接收到数据后进行处理,并控制LCD1602显示温湿度数据。
4 系统测试和结果验证
将程序写入单片机后并完成除草机器人的组装,其实物如图9所示。
为了验证本文设计的除草机器人的可靠性,对其自主除草功能进行了测试:首先,搭载除草环境。如图10所示,场地使用多块60 cm×60 cm泡沫地板拼接,场地中摆放有3D打印的南瓜和蕨类杂草,用于模拟农田里的作物和杂草。泡沫板上贴有用于机器人循迹用的黑色胶带,用于模拟农田里的道路。
其次,调试机器人的各功能模块。将机器人放置在场地循迹线起始位置,检查各器件性能正常后开启电源,观察机器人循迹功能,识别功能,机械臂的随动、夹取、放置和复位功能的情况并根据现象对机器人做出调整,直至其所有功能达到预期效果。
最后,进行整体测试。测试中机器人按照指定循迹线循迹并能准确识别杂草,驱动机械臂伸向杂草并驱动机械爪将其夹紧,图10为夹紧后拔出前时刻的抓拍。同时,除草机器人实时采集温湿度信息并显示在LCD显示屏上,如图11所示。
5 结语
本文设计了一种基于STM32的自动除草机器人。该机器人可运用在指定路径的种植区中,实现自动除草功能。机器人通过灰度传感器来识别种植区里的路径;同时通过摄像头模块进行颜色及形状识别锁定杂草,实现图像处理功能;机器人识别到杂草后STM32单片机控制机械爪定距夹取杂草,将其清除。此外,机器人在工作时还实时显示温湿度信息于LCD显示屏上。相对于采用化学除草剂的除草机器人,本设计采用机械方式除草,减少了环境污染,绿色环保。
