基于激光自混合干涉的高精度角度测量方法
2020-02-19朱均超许虹虹张海彤
朱均超,许虹虹,张海彤,左 铭,赵 岩
(天津理工大学 光电器件与通信技术教育部工程研究中心,天津市复杂系统控制理论及应用重点实验室,天津 300384)
1 引 言
随着纳米制造和精密测量技术的发展,高精度角度测量成为测试计量光学精密仪器科学研究中的重要测量技术[1]。近年来对高精度角度测量的精度要求越来越高,高精度角度测量技术在精密仪器测量领域的应用也越来越广泛。目前,用于光学角度测量技术的常见方法有全内反射法[2-5]、自准直法[6]、激光干涉法[7-10]和环形激光法[11]。全内反射法其原理是通过分析光束发生全发反射时s(Shear)光和p(Pressure)光的相位随入射角的变化实现角度测量。由于入射角发生全反射临界范围小,所以全内反射法适用于测量微小角度。自准直法角度测量原理是利用分光棱镜将两束激光分开,由两个探测器分别检测出两个维度上光点偏离中心的距离,既而求出二维偏转角的角度值。自准直发角度测量的误差大,常用于光路准直。激光干涉是指外腔长度和反馈光强度的变化能够调制输出光的光谱特征和光强,光电二极管探测反馈回来的干涉信号,造成激光输出的变化,从而实现对外部运动物体的测量。
传统的双光束激光干涉测量方法由于测量干涉条纹运动的小角度测量精度高而得到了广泛的应用。然而,传统的双光束激光干涉法存在光学结构复杂、尺寸大、不易准直[12-13]等缺陷。近年来为了避免缺陷的产生,采用了激光自混合干涉法(SMI)[14]。激光自混合干涉具有测量精度高、自对准、成本低、鲁棒性好、易于实现等优点,逐渐成为角度测量技术的重要研究方向。
Simona Ottonelli等[15]最开始提出一种基于自混合效应的三自由度激光系统,该测量系统的测量原理是通过旋转平面镜引起光程差的变化,根据光程差变化推出角度变化。该测量系统对入射光在平面镜中的位置有严格的限制,但光线无法完全返回激光腔。Yang Bo等[16]提出了基于可旋转五棱镜的小角度自混合测量系统。该测量系统能够保证光束沿回程重新进入激光腔内,对入射光的位置没有限制在一定的测量范围内,但借助直角棱镜作为关键的光学元件从而增加光路结构复杂性,并且仍存在测量分辨率较低问题。
本文将自混合干涉条纹计数法与激光三角测量原理相结合,提出了一种基于激光自混合干涉原理的高精度角度测量方法。该测量方法采用最简单的干涉条纹计数法得到目标物体在旋转过程中产生的条纹数量,然后根据激光三角测量几何关系计算出目标物体旋转的角度值。本文所提方法能够降低实验装置的复杂度,减少光学元件的使用,保证测量方法的稳定性同时进一步提高测量角度的精度。
2 激光测量系统设计
2.1 激光自混合干涉理论模型
根据光传播理论和激光激发条件,利用三镜腔等效模型分析自混合干涉理论[17],可得其数字模型如下:
φF(τ)=φ0(τ)-Csin[φF(τ)+arctanα]
(1)
P(φF(τ))=P0[1+mF(φF(τ))]
(2)
F(φF(τ))=cos(φF(τ))
(3)
式(1)称为相位条件。其中:α为线宽增益因子;arctanα为相邻两个位移方向改变点之间包含的自混合干涉条纹数;C为光反馈水平因子;τ为光波往返外腔一次所需的时间,τ=2L/c,L为外腔长度;c为光速。φF(τ)和φ0(τ)分别为LD有光反馈和无光反馈情况下光相位。
式(2)称为功率方程。P和P0分别为有外腔和无外腔情况下激光器的输出功率。
式(3)称为干涉函数。表现为外腔光相位对激光器输出功率的影响。m为调制系数,一般为10-3。
根据图1所示,假设位移量为x,得到外腔长度:
L=L0±x
(4)
其中,L0为初始外腔长度,即被测目标静止时,激光器内腔外壁M2到被测面的距离。
由公式(3)得到:
F(ωτ+2π)=F(ωτ)
(5)
可知,F(ωτ)是一个周期函数,周期为2π,即当ωτ变化2π时,产生一个干涉条纹。这里的λ0为激光器的工作波长。

(6)

图1 激光器自混合干涉原理等效示意图
可知,当角度测量系统的外腔长度变化λ0/2时,对应输出信号波形变化一个条纹。在实际测量过程中,考虑透镜的初始位置,可以进一步得到光程差:
(7)
式中,N为条纹数目;“±”为旋转方向,与干涉条纹的倾斜方向有关。
2.2 角度测量方法
角度测量原理建立在激光自混合干涉条纹计数法上,通过自混合干涉信号强度随目标物体偏转角度的变化,测量出物体旋转过程中的外腔变化量。然后利用激光三角法测量原理[18],分析外腔变化量与偏转角度的几何关系[19],得出偏转角度值。该角度测量方法增强了系统的抗干扰能力,降低了对测量结果的影响。
本文所设计的角度测量原理如图2所示,在目标物体的被测面上设置两个目标点A和B,分别附上棱镜反射片,由激光器1和激光器2发射出的激光,分别入射到棱镜反射片上。在一定角度范围内调节转台,光束能够经反射镜反射回激光器PD探测器内。当目标物体随转台旋转θZ时,目标点A和B对应移到了图2中A′和B′的位置。
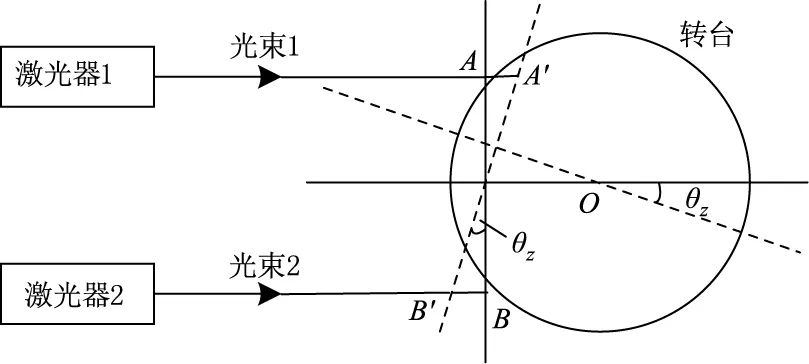
图2 角度测量原理示意图
旋转过程中反射回来的光束产生干涉,利用激光自混合干涉条纹计数法测量出外腔长度的变化量AA′和BB′。调节光束1和光束2分别与初始面AB垂直。已知A点与B点的垂直距离,根据激光三角测量几何关系,得到外腔长度的变化量AA′、BB′和角度θZ之间的关系:
(8)
故可推出目标物体在Z轴方向偏转的角度θZ。
3 基于激光自混合干涉的角度测量实验
实验环境为:
(1)实验需要在最低噪声以及最高响应速度的环境条件下进行,一般情况下光源LD在适度光反馈水平处于双稳态,此时自混合干涉条纹为类锯齿波形,所以采用自混合干涉条纹计数法测量目标物体的运动位移量更稳定。
(2)系统中采用半导体激光器的核心部件LD作为系统光源,能够产生波长为785 nm的红外可见光。半导体激光器内有一个封装在LD光源内部的光电探测器PD,并配有一个准直透镜,通过非球面透镜(数值孔径0.55和标称焦距4.51 mm)对LD光源的输出光进行准直。
(3)两个激光器如图3所示的方式固定在精密三维平台上。为了保证σ(λ)/λ≅10-9所需的波长稳定,需要控制PD二极管的温度并将其稳定到0.01 ℃。
(4)为保证激光器的电流能够被精确控制在规定范围内,采用恒定电流激励光源LD模式。
(5)高精度转台装置如图3中所示,在转台被测面上的A、B两点分别附上反射镜,通过控制器控制转台速度。

图3 实验装置
实验步骤:在转台转动过程中,两束激光经过A、B两点的反射镜反射回来,达到改变外腔长度效果,由激光器内的光电探测器PD分别接收反射回的光信号,并将光信号转换为电信号。电信号通过信号处理电路板的放大模块(增益50) 和模数转换后,利用示波器采集被测面上A、B两点产生的条纹波形,将采集数据发送给PC机进行计数处理,可以得到外腔位移变化量,最后通过公式(8)计算出相应偏转角度。由于整个系统不需要使用直角棱镜或偏振分光镜等光学器件,因此整个系统比传统的光学干涉系统简单、结构紧凑、易准直。
4 实验结果及分析
4.1 测量实验结果
为了验证上述理论,在不同角度位置下进行了实验。采集到在0.7°的测量范围内A、B两点的波形。转台旋转速度为0.04°/s,示波器幅度值为10 mV/div,采样时间值为100 ms/div的实验条件下测量效果最佳。采用MATLAB对示波器采集的波形进行数据处理,处理后的测量实验结果如图4所示。


图4 测量实验结果
在实验中目标物体每移动半个波长,就会产生一个自混合干涉条纹,即本实验角度测量的分辨率可以达到λ0/2。由于目标物体旋转方向与波形倾斜方向对应,从图4中可以看出锯齿波形携带方向信息,因此通过锯齿波形能识别出目标物体的旋转方向。当转台带动目标物体转动时,被测点A点远离激光器1的同时被测点B点靠近激光器2,反之,被测点A点靠近激光器1的同时被测点A点远离激光器2。选取0°~0.4°范围内进行了实验分析。
图5中的点表示实验测得的角度值,能够清晰地反映实验角度与实际角度的线性拟合关系,实验角度斜率为0.9616,数据表明实验角度与实际角度值的曲线线性良好,实验测量结果与实际角度值基本一致。

图5 实际角度与实验角度的线性拟合图
4.2 重复性实验
为了进一步验证本方法的稳定性,在不同角度下进行重复性实验。转台的旋转速度为0.04°/s,分别转动7个(0.1°、0.15°、0.2°、0.25°、0.3°、0.35°、0.4°)位置,每个位置重复测量三次。如表1所示实验数据和最大偏差对比。从表1可以看出真实值与测量值的数据对比。

表1 角度测量结果 单位/(°)
为了清晰直观反应测量偏差,绘制了图6条纹数对比直方图,可以看出本实验系统重复性好且偏差率小。
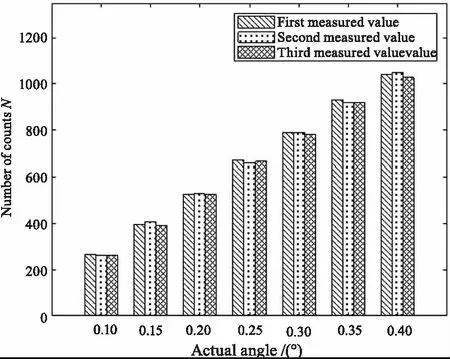
图6 条纹数对比直方图
本文所提方法在±0.4°范围内测量精度可达(±3.1×10-3)°,本文在测量精确度与稳定性上具有一定的优势,转台在实验过程中存在轻微震动,改变了激光再次进入激光腔的强度,导致波形不光滑。如果能消除转台震动,可有效减少实验误差。
5 总 结
提出了一种基于激光自混合干涉原理的新型角度测量方法,该方法是一种高精度动态角度测量技术。利用激光三角法测距原理中的几何关系进行角度计算,通过实验系统验证了该角度测量方法的可行性。实验结果表明该测量数据拟合度好且误差率小,在有效测量范围±0.7°内测量精度可达(±3.1×10-3)°。本文所提出的方法为高精度角度测量提供了一定的研究基础,达到测量效率高和测量速率快的优势,可实际应用于各种载体的实时动态测量。
