基于旋转双光楔的像方扫描大视场成像光学系统设计*
2020-02-06杨克君郭鑫民胡海力张建隆
杨克君,杨 振,张 勇,郭鑫民,胡海力,张建隆
(1.哈尔滨工业大学 仪器科学与工程学院·哈尔滨·150001; 2.哈尔滨工业大学 可调谐激光技术国家级重点实验室·哈尔滨·150080; 3.哈尔滨工业大学 光电子信息科学与技术系·哈尔滨·150080)
0 引 言
无人机因具有体积小、造价低、使用方便灵活、战场生存能力较强等优势,近年来在军民领域得到了广泛应用[1-7],并将在未来复杂战场侦察与作战、邮件快递投送、智慧城市等领域中产生更大的应用价值[8]。采用先进的光电有效载荷,对于增强无人机任务完成能力并最大限度地实现战场数字化、提高其他武器系统的效能而言具有非常重要的推动作用。同时,随着未来战场信息化、网络化时代的到来,作战对信息的依赖程度也达到了顶峰。一个完整的无人机系统主要包括无人飞行器平台、有效载荷、数据链、操作员、控制单元、显示器等。其中,光电有效载荷承担着获取原始目标及环境信息的重要职责,其所获取的信息质量将在很大程度上影响对后续组成的判断和整个系统的工作状态。因此,无人机光电载荷在整个无人机系统中扮演着无人机“眼睛”的角色,其性能的高低直接决定着其任务完成质量。
美国高度重视无人机机载光学相机的研制,采用先进的光学设计理念、新材料、高性能器件不断提升相机的研制水平,并且优先将其应用于军事领域。由美国军工大户洛克希德·马丁公司研制的Sniper 先进瞄准吊舱(Advanced Targeting Pod,ATP)具有较高的信息传输能力,可为驾驶员提供精确的目标瞄准能力。Sniper ATP的光学系统采用了共孔径设计,所有光学传感器都共用一个孔径,可有效削减吊舱体积。吊舱前端的光学头罩采用特殊设计的楔形结构,有效提升了吊舱的高速飞行适应性,减少了吊舱在高速飞行时由气流和头罩摩擦而产生的较高气动热。该吊舱集成了中波前视红外相机、双波段激光器、CCD可见光相机、激光光斑跟踪仪和激光指示器,目标确认距离为第一代吊舱的4倍,吊舱可在超过15km的距离之外精确识别目标。值得注意的是,该吊舱的设计是未来大型高速无人机光学载荷技术发展的趋势。高速无人机要求光学载荷具备与无人机相匹配的气动保形设计,同时也满足小窗口、大视场的成像要求,以确保实现对目标的远距离精确识别。
国内无人机光电吊舱整体水平较国外存在一定差距,这主要表现在光电吊舱小型化、轻量化、高精度、高集成度设计等方面。国内吊舱大都采用常规物方扫描的传统体制进行光学设计和系统研制,系统体积和质量较大。而针对基于像方扫描技术的光学成像系统的设计与性能研究,国内则初步开始着手进行,该系统在实际工程应用中暂未见相关报道。
2012年,邓键[9]基于显微摄影的成像原理,研究了像方扫描,以扩大视场的途径,并建立了一个二次成像的设计模型。2017年,林森等人[10]设计了带有摆镜的制冷型中波红外像方扫描光学系统,得出的结论是在系统扫描视场和瞬时视场相等的条件下,像方扫描在减小系统体积和减轻系统总质量方面具备较大的优势。2018年,电子科技大学的曾钦勇[11]研究了基于快速放射镜的宏微二级复合稳定平台控制和步进凝视扫描技术,大幅提升了平台的稳定精度和成像质量。同年,中国科学院上海技术物理研究所的陈超帅[12]设计了一套红外面阵搜索系统像移补偿方案,提出了连续扫描凝视补偿的成像方式,采用像方扫描平行光补偿技术方案实现了补偿反射镜的高帧频、大摆角运动。
综上所述,不断拓展的在军民领域中的巨大的应用前景也对无人机侦察系统的机动性能和侦察性能提出了更高要求,这就要求无人机光电载荷进一步向小型化、轻量化方向发展。无人机超声速、高机动飞行性能的提升,要求相应的无人机载荷具有更强的抗过载能力与快速成像能力。然而,无人机高速化却恶化了其光电载荷的工作条件,使得光学成像系统的分辨率水平提升对其视轴抖动更加敏感,这两者成为了一对矛盾体。此外,由无人机高速化造成的气动热效应要求光学成像系统以较小的红外窗口实现大视场角的成像效果,这就对光学系统的设计(其中主要包括大视场设计、无热化设计、成像光路优化、噪声抑制等)提出了更高的要求,同时也对光学载荷的光轴指向精度控制提出了更高要求。
基于像方扫描原理设计的光学成像系统,具有同等条件下径向尺寸最小、体积小、运动负载质量小、可消除图像运动模糊、可缩短目标搜索时间等显著特点。高速无人机目前面临着采用较小的红外窗口难以实现大视场成像的问题。
因此,本文提出了一种新型的、基于旋转双光楔的像方扫描大视场成像光学系统设计。该设计由前置大视场望远光学镜组、成像光学镜组和双光楔扫描器三部分组成,降低了系统的设计难度。所设计的光学系统成像质量高(全视场MTF>0.42@33(lp/mm)),像点集中度好,基本接近衍射极限。相比传统的扫描光学系统,本文采用了旋转双光楔扫描器设计,可避免像旋的产生,在保证各项设计指标不变的前提下,能够有效缩小光学系统的径向尺寸,可满足无人机在未来实现轻量化和小型化的应用需求,具有良好的应用前景。同时,该技术可推广至高速列车、卫星光学载荷等多个领域,实现高速运动状态下的大视场成像,为我国军民两用相关领域提供重要的技术支撑。
1 像方扫描成像技术原理及特点分析
1.1 像方扫描成像技术原理
传统扫描通常采用光学系统整体旋转或依靠光学元件的运动来完成,技术成熟,被广泛应用于遥感、制导、侦察探测等领域[13]。其优点是光学系统结构简单,成像质量高;缺点是占用空间较大,比较笨重,窗口的尺寸对扫描范围形成了很大约束,窗口尺寸过大不利于载体速度的提高。
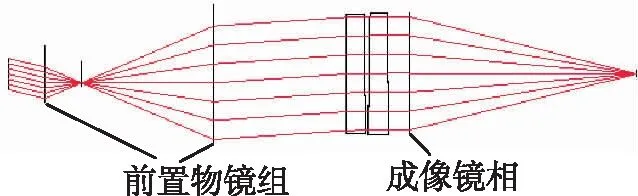
像方扫描成像技术是近年来在传统扫描成像技术的基础上发展起来的新型扫描成像技术,利用大视场光学系统将扫描视场范围内的成像光束经前置光学系统汇聚成像,形成大尺寸的中间像面。通过扫描机构的运动,将中间像面的一部分投射给成像光学系统而形成瞬时视场图像。扫描机构与成像光学系统可分时将中间像面的不同区域依次成像,完成扫描功能,其光学系统的结构原理图如图1所示。

(b)扫描中心视场
(c)扫描下边缘视场图1 像方扫描成像原理示意图Fig.1 Schematic diagram of image side scanning imaging principle
基于像方扫描技术的成像系统的工作过程为:前置大视场光学镜组接收由物方场景出射的光束,光束经透镜折射后汇聚,形成中间像面,中间像面包含扫描视场范围内的全部景象信息;成像光学镜组是一个小视场投影镜头,其以前置大视场光学镜组所形成的中间像面为物面,将其中的一部分场景再次成像。探测器与成像光学镜组固连,探测器光敏面与成像光学镜组像面重合,成像光束汇聚到探测器光敏面上形成与瞬时视场对应的图像;扫描器在运动机构的驱动下,按照一定规律调整成像光学镜组的光轴指向,将中间像面上的场景信息分时传递给成像光学镜组,从而完成扫描。像方扫描成像光学系统的工作示意图如图2所示。
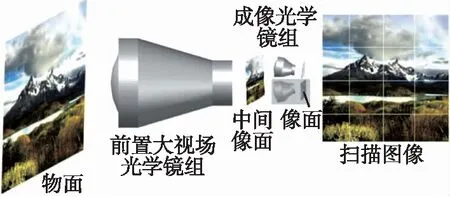
图2 像方扫描成像光学系统的工作示意图Fig.2 Schematic diagram of image side scanning imaging optical system
1.2 像方扫描成像光学结构的形式及特点分析
基于像方扫描技术的光学系统主要有以下四种结构形式:摆镜扫描光学结构、球形像面二轴扫描光学结构,以及由上述两种结构组合而成的扫描光学结构等。表1对比了不同像方扫描光学系统结构形式之间的差异。
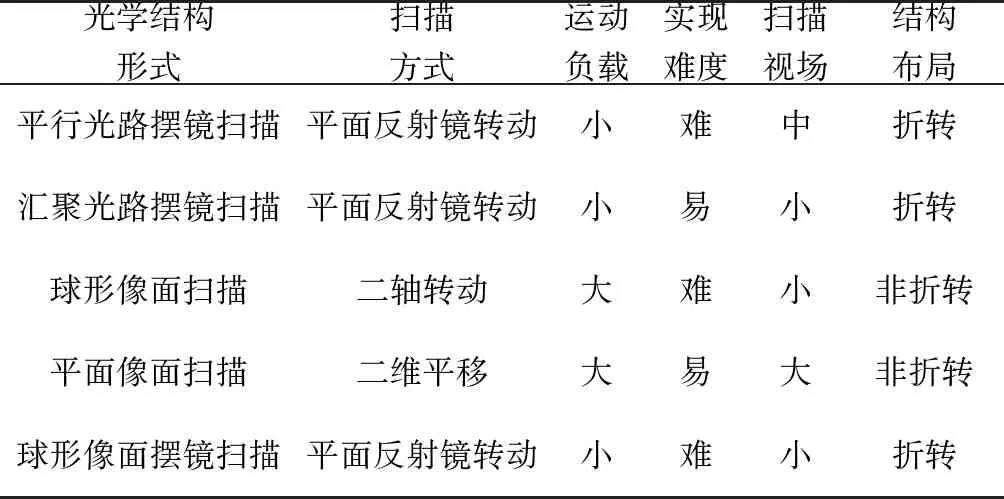
表1 像方扫描光学系统结构形式对比Tab.1 Comparison of the structure for the image side scanning optical system
平行光路摆镜像方扫描光学结构的优点为:只有摆镜为运动部件,其余部分固定不动,可降低运动负载,有利于提高扫描速度;缺点是望远光学系统的结构复杂,扫描视场范围较小(一般在30°~40°左右,入瞳口径Ф为40mm时)。另外,由于光线经摆镜反射,光路折转,横向空间尺寸较大。
汇聚光路摆镜像方扫描光学结构的优点为,其内部只有摆镜为运动部件,运动负载小;其缺点是摆镜在扫描过程中,其像面位置发生变化,产生离焦,因此扫描视场范围较小,一般在10°以下。此外,其同样也存在横向空间尺寸较大的缺点。
球形像面扫描光学结构的优点是:运动负载较小,通过小角度转动即可实现大范围扫描,没有像旋产生;缺点是物镜组结构复杂,成像质量较低,扫描视场范围较小,系统装调难度大。此外,当中间像面曲率为零(即中间像面为平面)时,扫描机构由转动运动变化为平移运动,通过耦合镜组和探测器平移实现扫描功能。扫描机构通过平移运动方式进行扫描,在振动量级较大的环境条件下,容易出现图像抖动现象。系统隔离度较差,导致图像清晰度下降。
组合式扫描结构[14],即摆镜与球形像面组合的扫描形式。其优点是系统中的运动部件为摆镜,运动负载小,缺点是系统过于复杂,扫描视场范围小,装调难度大。
本文提出了基于旋转双光楔的新型像方扫描方式,此种扫描方式的优点是可以有效减小窗口尺寸,在扫描过程中不产生像旋;系统径向尺寸小,适用于狭长安装空间的要求。其缺点是:系统长度较长,与其他扫描形式相比长度增加了20%~50%;双光楔扫描器的旋转速度与扫描角度为非线性关系,扫描运动控制难度较大。
本文采用基于旋转双光楔的新型像方扫描方式,主要解决了高速无人机在平台小窗口约束条件下实现大视场扫描的问题。与摆镜扫描形式相比,其可消除像旋影响,增大扫描视场;与球形像面形式相比,其可降低设计难度。
本文所采用的基于旋转双光楔的新型像方扫描红外成像技术方法未见公开报道。该系统相比传统物方扫描,可在保持搜索范围不变的基础上减小窗口尺寸至原有尺寸的2/3以下;相比摆镜像方扫描方式,该系统不产生像旋,径向尺寸可减小30%以上;相比球形像面像方扫描方式,其径向尺寸可减小20%以上。同时,由于该系统可实现瞳窗耦合设计,可有效减小窗口尺寸,因此其有望解决某些高速飞行器扫描成像范围大与窗口尺寸小之间的矛盾。
2 基于旋转双光楔的像方扫描成像光学系统设计
2.1 系统组成及特点
为减小无人机光学载荷的窗口尺寸,满足气动外形的要求,本文提出了一种基于旋转双光楔的像方扫描光学结构,如图3所示。

图3 转动双光楔像方扫描光学结构示意图Fig.3 The optical structure diagram of image side scanning with rotating double wedge
转动双光楔像方扫描光学结构由前置望远光学系统、双光楔扫描器及成像光学镜组组成。其中,前置望远光学系统为一大视场望远光学系统,其将扫描视场范围的光束汇聚后再准直,成像光学系统为一小视场光学成像系统。双光楔扫描器中的两个光楔按照一定速度差绕光轴旋转,可在固定时间间隔下将物方特定视场范围的光束偏折进成像光学镜组,以实现扫描功能[15]。
前置望远光学系统采用开普勒望远光学结构,由两组正光焦度的透镜组组成。通过改变两透镜组的焦距比,可实现角放大倍率的调整,同时可完成入瞳与窗口、出瞳与扫描器的耦合,可以满足不同的应用需求。成像光学镜组采用二次成像光学结构,通过匹配设计可实现与前置望远光学系统的光瞳耦合,提高冷光阑效率。
与摆镜扫描及球形像面扫描光学结构比较,旋转双光楔扫描方式具有以下优点:
(1)系统光轴在一条直线上,没有空间折转,适用于狭长的安装空间,有利于实现系统的小型化;
(2)前置望远光学系统出瞳在两个光楔中间,使得其尺寸较小,有利于减轻运动负载,有利于实现系统轻量化的要求;
(3)扫描过程中没有像旋,在同等尺寸扫描器件条件下,更容易实现大视场扫描。
2.2 光学系统指标及参数计算
成像光学镜组采用二次成像光学结构,需要根据前置大视场望远光学镜组来确定视场及入瞳口径,并将探测器冷光阑与前置大视场望远光学镜组出瞳进行耦合设计,确保系统100%的冷光阑效率,减少杂散光对图像质量的影响。各镜组参数计算如下。
假定无人机的飞行高度为10km,飞行速度不小于300(m/s),探测目标分辨率不大于5m,探测宽度不小于10km;工作波段为3.7μm ~4.8μm;红外探测器的参数为:像元数640×512,像元尺寸15μm,帧频50Hz,F数为2。根据上述参数,可计算光学系统的技术指标,如表2所示。

表2 光学系统设计指标Tab.2 The design requirements of optical system
确定了扫描视场与瞬时视场后,根据下式可计算出物方扫描角度范围为±21.665°
(1)
其中,θT为物方扫描角度,θS为扫描视场角,θI为瞬时视场角。下面,根据光学系统技术指标进行前置大视场望远光学镜组和成像光学镜组的设计参数分配,具体计算过程如下。
首先,系统焦距与前置大视场望远光学镜组角放大倍率及成像光学镜组焦距满足以下关系
(2)

根据式(1),可得扫描器参数,如表3所示。
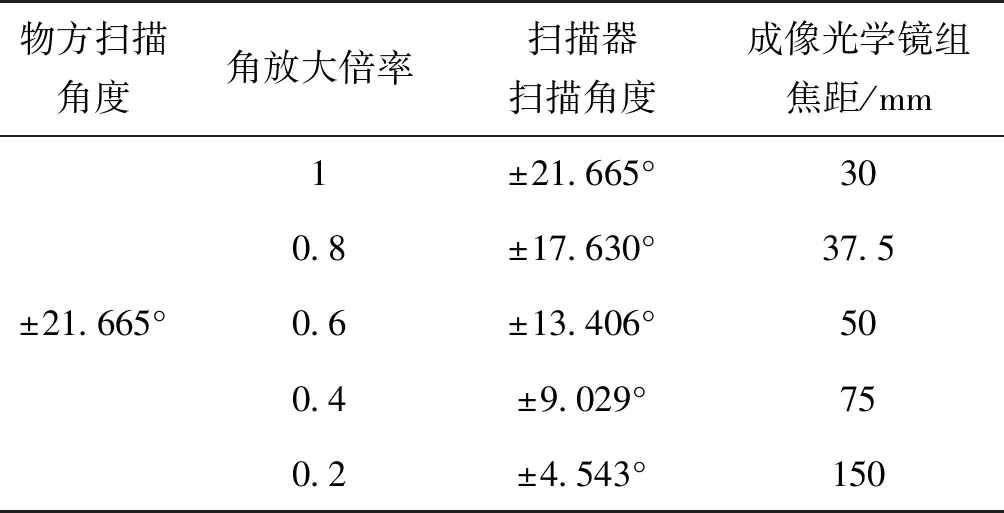
表3 扫描器参数Tab.3 The scanner parameters
已知系统焦距为30mm,物方视场为60°×18.3°。为降低由光楔楔角过大而带来的色差校正难度,确定前置大视场望远光学镜组的角放大倍率为0.28,则扫描器扫描角度为±6.347°,入射光束角度范围为16.67°×5.08°,出射光束角度范围为4°×5.08°,成像光学镜组的焦距为108mm。
根据上述计算结果,确定前置大视场望远光学镜组设计输入参数和成像光学镜组设计输入参数分别如表4和表5所示。

表4 前置大视场望远光学镜组设计指标Tab.4 The design requirements of front large field of view telescope

表5 成像光学镜组设计指标Tab.5 The design requirements of imaging optical lens group
2.3 前置大视场望远光学镜组设计
由表4可知,前置大视场望远光学镜组是一个望远光学系统,平行光入射,平行光出射。由于窗口尺寸及成像光学镜组入瞳耦合的约束,要求望远系统的入瞳及出瞳均在透镜组的外侧,且瞳距需满足结构安装的需求。根据前置大视场望远光学镜组的设计要求,由于需要与成像光学镜组进行光瞳耦合设计,同时受窗口尺寸限制,需要将入瞳放置在窗口上。因此,前置大视场望远光学镜组选择了开普勒望远光学结构。
应用光学设计软件Zemax设计后的前置大视场望远光学镜组如图4所示。设计的前置大视场望远光学镜组包含6片透镜,其中透镜材料为硅和锗,含有3个高次非球面和1个衍射面。在常温状态下,系统的成像质量(调制传递函数、系统点列图、像面能量集中度)如图5所示。由图5可知,系统成像质量高,中心视场调制传递函数(Modulation Transfer Function,MTF)在33(lp/mm)空间频率下可达0.65。全视场范围内MTF>0.5@33(lp/mm),像点能量集中度较好,接近衍射极限。

图4 前置大视场望远光学镜组结构图Fig.4 Structure diagram of front large field of view telescope group

(a)系统调制传递函数(MTF)曲线
(b)系统点列图

(c)像面能量集中度图5 前置大视场望远光学镜组成像质量Fig.5 The imaging quality of the front large field of view telescope
前置大视场望远光学镜组的畸变和像差曲线如图6所示。设计结果曲线显示,各种像差得到了较好的校正,像质满足要求。
通过分析可知,前置大视场望远光学镜组成像质量良好,在与成像光学镜组进行联合设计时无须进行大量改动,可降低系统的复杂度。因此,前置大视场望远光学镜组的设计符合要求。
(a)场曲和畸变

(b)综合像差(Ray Fan)曲线图6 前置大视场望远光学镜组畸变和像差曲线Fig.6 Distortion and aberration curves of the front large field telescope
2.4 成像光学镜组设计
成像光学镜组入瞳需与前置望远光学镜组瞳孔耦合,其入瞳在系统外部。同时,为确保探测器的冷光阑效率,减少杂散光对像质的影响,须将出瞳与探测器冷光阑重合,因此需采用二次成像光学结构。设计后的成像光学镜组结构如图7所示。

图7 成像光学镜组光学结构图Fig.7 The optical structure diagram of imaging optical lens group
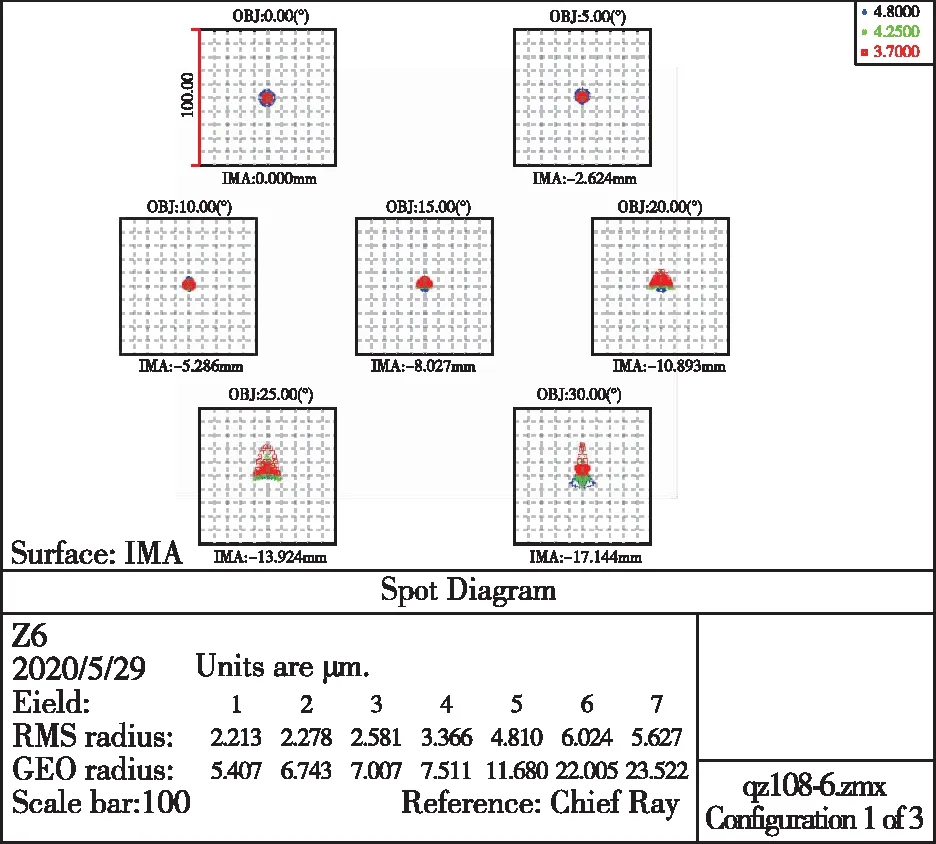
由图7可知,成像光学镜组包含5片透镜。其中,透镜材料为硅、锗和硫系玻璃,含有3个高次非球面和1个衍射面,系统成像质量如图8所示。从图8可以看出,成像光学镜组系统的MTF在33(lp/mm)空间频率下可达0.55,全视场范围内MTF>0.4@33(lp/mm),像点能量集中度较好,接近衍射极限。

(a)成像光学镜组调制传递函数曲线

(b)成像光学镜组点列图

(c)像面能量集中度图8 成像光学镜组成像质量Fig.8 The imaging quality for imaging optics
通过上述分析可知,成像光学镜组的成像质量良好,各种像差得到了较好的校正,设计符合要求。

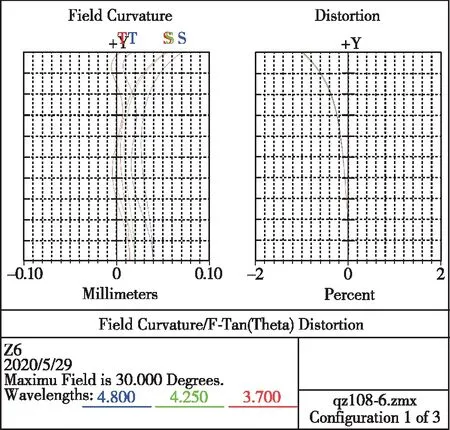
(a)场曲和畸变

(b)综合像差(Ray Fan)曲线图9 成像光学镜组畸变和像差曲线Fig.9 Distortion and aberration curves of imaging optics
2.5 双光楔设计
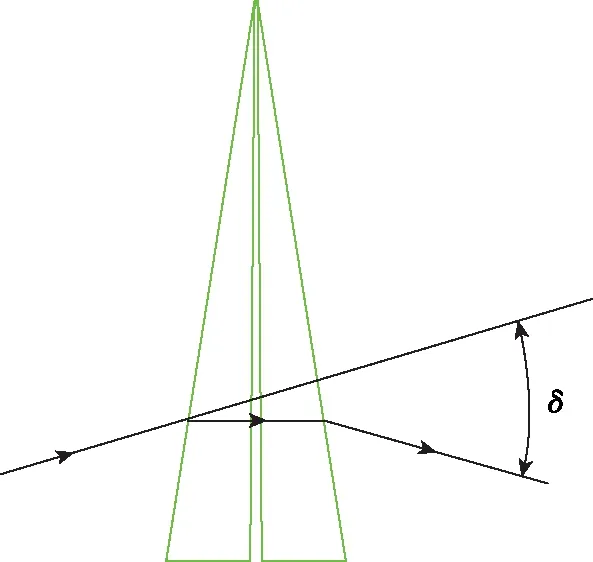
光线经光楔偏折如图10所示,根据式(3)可计算光楔楔角角度
(3)
其中,n为光楔折射率,α为光楔顶角,δ为光线偏折角。
成像光学镜组的畸变和差曲线如图9所示。
当两光楔主截面平行且同向放置如图11(a)、图11(b)所示时,所产生的偏向角最大,为两光楔偏向角之和;当一个光楔绕光轴旋转180°时,所产生的偏向角为零,如图11(c)所示。

图10 光线经光楔偏折示意图Fig.10 The diagram of light deflection through the wedge
(a)正向最大偏转

(b) 反向最大偏转
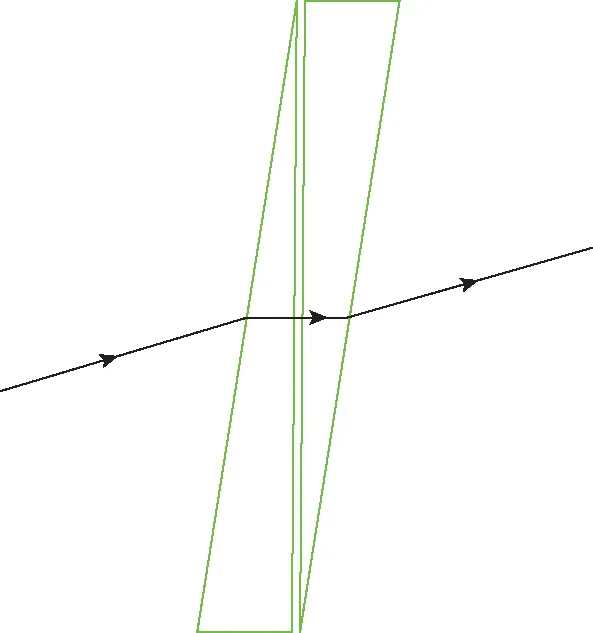
(c) 无偏转图11 双光楔不同转角光线偏转特性Fig.11 The deflection characteristics of beam in the double optical wedges at different angles
当两光楔绕光轴相对旋转(即一个光楔沿逆时针方向旋转ω角,另一个光楔沿顺时针方向旋转ω角)时, 两光楔产生的总偏向角随角ω而变化,即
φ=2(n-1)αsinω
(4)
其中:n为光楔折射率,φ为总偏向角,α为光楔顶角,ω为光楔转动角。根据式(4)可计算出不同扫描角度对应的光楔旋转角。
根据上文前置望远光学系统及成像光学镜组的参数,可计算光楔的基本参数。
已知前置望远光学系统的出射光束角度为16.67°×5.08°,其中16.67°为扫描方向,成像光学镜组视场为4°×5.08°,4°为方位扫描瞬时视场。由此,可计算光楔对光线的最大偏折角为6.347°。
由于红外材料对不同波长光线的折射率不同,不同波长光线在经过光楔后所产生的偏折角度不同,存在色散现象,需要进行色差补偿。常用的色差补偿方法是采用不同色散系数的红外材料进行搭配,以实现消除色差的要求。采用复合光楔结构形式,选择硅和锗作为光楔材料,将一个光楔分解为两个光楔。一个光楔材料为硅,另一个光楔材料为锗,两个光楔相对固定,组合成光楔组件。每个光楔组件承担最大偏折角的一半,即约为3.17°,两个光楔组件共同完成6.347°的偏折角。根据式(5),可计算两种材料光楔偏折角的对应关系。
(5)
其中:δ为光经过两种材料光楔组后的总偏折角,δSi为光经过单个硅光楔的偏折角,δGe为光经过单个锗光楔的偏折角,ν为红外材料色散系数,νSi为硅色散系数(568.5),νGe为锗色散系数(260.4)。
应用式(4)和式(5)计算光楔参数,所得的结果如表6所示。

表6 光楔参数表Tab.6 The table of optical wedge parameters
光楔组的外形如图12所示。

图12 光楔组外形示意图Fig.12 The outline diagram of optical wedge group
应用光学设计软件Zemax将光楔组与理想透镜组合,评价其对成像质量的影响,建模如图13所示。
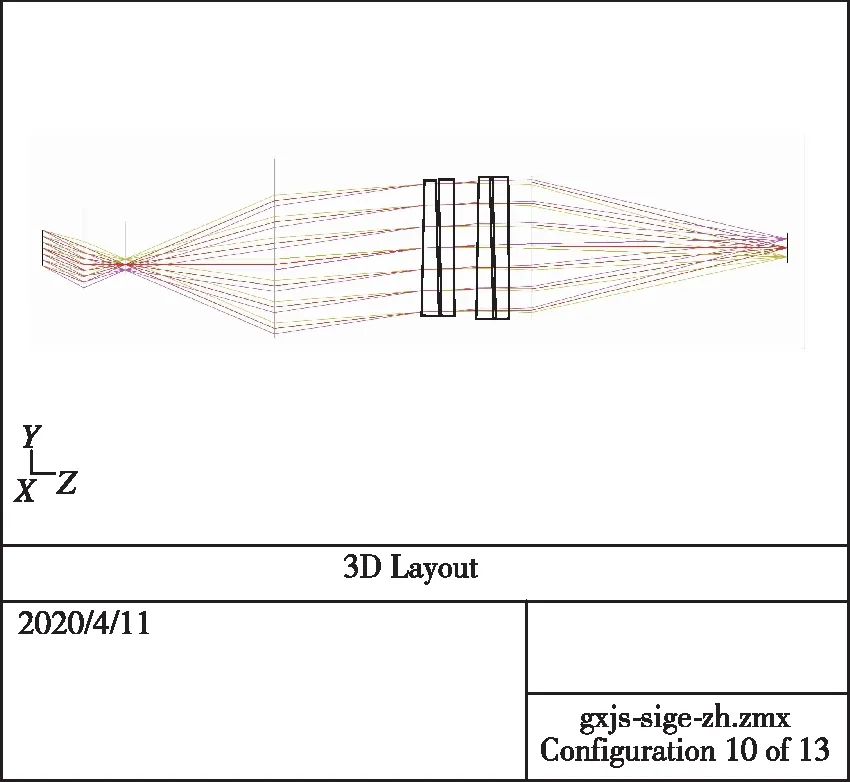
图13 光楔组成像质量分析结构示意图Fig.13 The structural diagram of image quality analysis for the double optical wedge
光楔组的成像质量及色差如图14所示。
通过上述分析,采用硅、锗光楔组合可将色差减小至0.2μm以下,成像质量达到衍射极限,满足设计要求。
3 光学系统整体设计与分析
在完成系统中的主要光学组件(前置大视场望远光学镜组、成像光学镜组及双光楔扫描器)的单独设计优化后,将三部分按照光瞳耦合要求进行对接。应用光学设计软件进行整体优化设计及像质评价,对接后系统的光学结构如图15所示。

(a)光楔组MTF曲线
(b)光楔组MTF曲线

(c)光楔组点列图图14 光楔组成像质量及色差Fig.14 The imaging quality and chromatic aberration for the double optical wedge

图15 系统对接示意图Fig.15 The system docking diagram
应用光学设计软件Zemax的多重组态功能设置光楔旋转角度,分析在不同扫描角度下系统的成像质量。根据式(2)和式(5)可计算物方扫描角度与光楔旋转角度之间的对应关系,如表7所示。不同扫描位置的光路图及成像质量如图16所示。

表7 光楔转角与物方扫描角度对照表Tab.7 Comparison table for the wedge angle and the object scanning angle

(a)物方0°光路图及MTF曲线

(b)物方14.58°光路图及MTF曲线

(c)物方21.39°光路图及MTF曲线
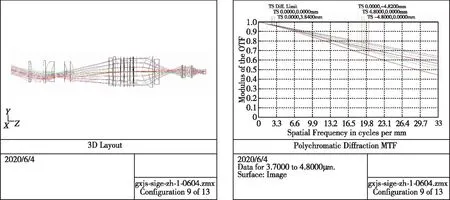
(d)物方-14.58°光路图及MTF曲线
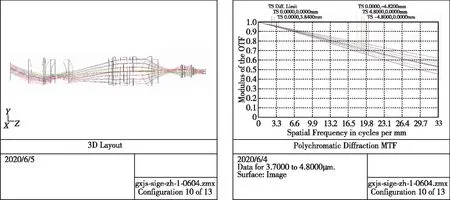
(e)物方-21.39°光路图及MTF曲线图16 不同扫描位置光路图及成像质量Fig.16 The optical path map and imaging quality at different scanning positions
通过对系统不同扫描位置的成像质量进行分析,系统整体调制传递函数在所有扫描位置MTF>0.42@33(lp/mm),均能够满足使用需求。
综上,通过对系统各组成部分进行设计及分析,基于旋转双光楔的像方扫描光学系统能够实现大范围扫描功能,各扫描位置成像质量可以满足要求。本文提出的基于旋转双光楔的新型像方扫描方法相比传统光学系统,可减小20%以上的径向尺寸,可将质量减小30%以上。该系统可应用于对特定外形有特定要求的无人机光学成像探测载荷。通过窗口共形设计,可有效降低由载体高速飞行所产生的气动效应对成像质量的影响,提高图像信噪比,有利于提高无人机的飞行速度。
通过对提出的基于旋转双光楔的新型像方扫描成像方法的研究,进一步拓宽了现有像方扫描技术的应用范围。针对某些对窗口尺寸及安装空间有严格要求的成像搜索系统,可以有效增加搜索范围,提升系统的综合性能,为无人机光电成像探测系统提供了新的技术途径。
4 结 论
基于像方扫描原理的光学成像载荷,在确保指标满足要求的前提下,与传统成像方式相比,具有窗口尺寸小、运动负载质量小、可实现高速扫描等优点。本文针对目前高速无人机光电载荷体积大、视场范围小的问题,提出了一种基于旋转双光楔的像方扫描大视场光学系统设计,可避免像旋的产生。同时,相比传统扫描光学系统设计,采用旋转双光楔的设计能够使光电载荷系统的径向尺寸大幅缩小,并满足狭长空间的安装需求。
本文首先介绍了像方扫描成像技术的原理,对像方扫描光学系统的典型结构形式及特点进行了对比分析;然后,开展了基于双光楔扫描的大视场像方红外成像光学系统设计。为降低系统复杂度及便于实际加工和装调,将该光学系统设计分解为前置大视场望远光学镜组、成像光学镜组和双光楔扫描器三个子系统,并进行了分部设计和仿真。
本文设计的旋转双光楔像方扫描光学系统的物方视场范围为±21.665°,满足了大视场范围的工作要求。在工作波段3.7μm~4.8μm范围内,系统的成像质量高,中心视场MTF在33(lp/mm)空间频率下可达0.45,全视场范围内MTF>0.42@33(lp/mm),像点能量集中度较好,接近衍射极限。提出的基于旋转双光楔的新型像方扫描方法,相比传统光学系统,在径向尺寸上可减小20%以上,质量可减小30%以上。但本文设计的光学系统的复杂程度仍然较高,未来将继续缩小光学系统的整体尺寸,为实现无人机光学载荷的小型化、轻量化提供技术支撑,并拓展其应用范围。
