复杂地形条件下的着陆设计与控制仿真
2020-02-04任佳王计真刘小川
任佳 王计真 刘小川
摘要:为解决飞行器无法在复杂地形条件下着陆的问题,开展着陆装置设计与控制方法研究。本文设计了一种六腿结构,提出该结构在复杂地形条件下的着陆设计方法,并通过Matlab仿真的方法,开展着陆性能与控制方法仿真。结果表明:该六腿起降装置可有效适应复杂地形条件下的着陆需求,通过控制驱动杆角度和足底坐标均可以实现着陆控制,但直接控制足底坐标的效果更优。
关键词:起降装置;复杂地形;着陆设计;控制
中图分类号:V285文献标识码:ADOI:10.19452/j.issn1007-5453.2020.09.014
基金项目:航空科学基金(2017ZA23001)
近年来,随着执行任务的现代化和复杂化程度提高,对飞行器的要求越来越高[1-3]。为适应复杂野外环境着陆和复杂应用场景的需求,自适应起降装置将有着重要研究意义。
近些年来,智能控制方法[4]的发展使无人机具有更高的适应性。此外,足式机器人在复杂环境下具有更高的灵活性与环境适应性,与轮式、履带式机器人相比具有明显的优势,更容易实现复杂地形的稳定行走与爬行[5]。其中,相比于单足、双足、四足、八足等多种类型,六足结构具有更好的稳定性和环境适应性,深受研究者的青睐。
星球着陆探测器采用腿式结构完成不平整表面的着陆,所以腿式结构具有更高的复杂地形适应性[6]。腿部系统作为起降装置的重要结构,其结构特性直接决定了起降装置的运动学特性和动力学特性[7]。所以,腿部系统的设计原则是采用仿生学理念,提出简单且高效的结构和驱动系统,实现仿生运动。本文提出一种基于飞行器的复杂地形腿式结构的设计方法,可显著拓展飞行器的(陆地)地形和(海洋)环境适应能力。本文给出具体的设计过程,并基于设计的起降装置构型,给出其控制方法。通过仿真验证的方式,证明该设计方法的可行性与有效性。
1起降装置设计
基于无人直升机给出地形自适应起降装置的工作原理与设计方法。
1.1起降装置设计构型
该起降装置不同于传統的轮式结构和滑橇式结构,融合仿生设计与智能控制,系统包括环境感知系统、控制/驱动系统、模块化驱动关节和腿部承力结构、足底缓冲橡胶等。
自适应起降装置包含6条腿共14个关节,其中每条腿具有两个独立关节,三条腿共用一个转动关节实现腿部收入机体中。14个关节各自解耦,可分别控制。起降装置的6条腿通过独立的关节解耦控制,实现各自的姿态调整。腿部关节通过模块化电驱动单元实现,包括伺服电机、减速机、制动器、编码器和输出轴。通过控制器控制电机驱动器,实现伺服电机的驱动和控制。
1.2起降装置工作原理
应用过程中,地形自适应起降装置的复杂地形着陆工作过程如图2所示。
通过图2可以看出,无人直升机在起动着陆过程后,通过以下5个步骤实现地形自适应着陆: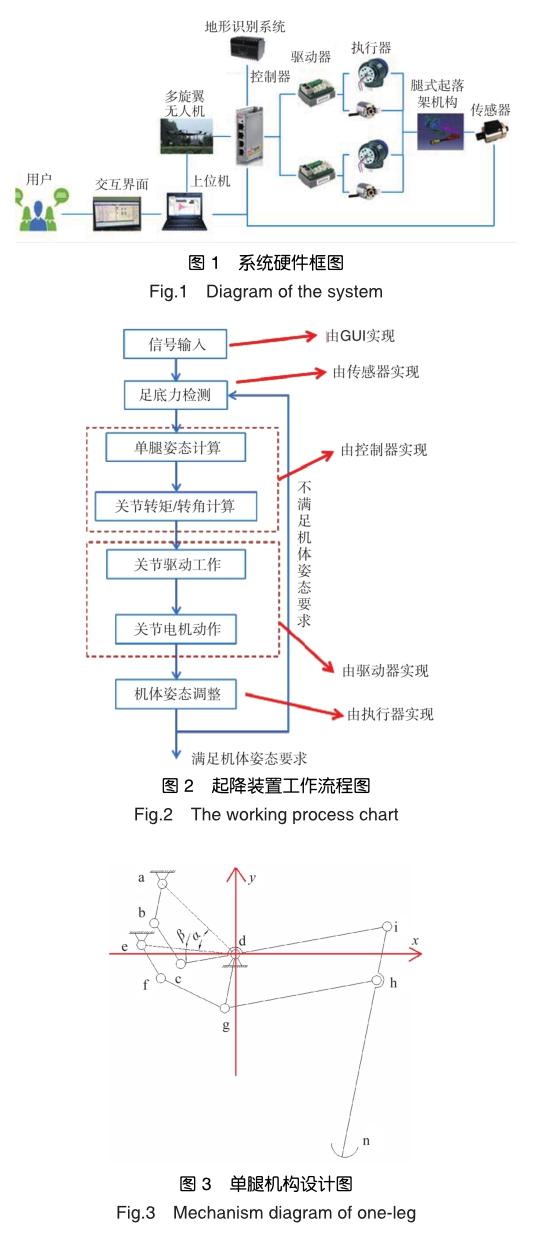
(1)在指定高度悬停,通过雷达实现地形扫描与识别,建立着陆地形模型。
(2)起落架控制系统收到着陆地形模型后,在无人直升机缓慢着陆的过程中,同时控制起落架系统运动,实现着陆地形的姿态预摆。
(3)缓慢着陆直至起落架触及地面,安装于足部的载荷传感器产生力信号,将力信号传递给起降装置控制器,作为姿态控制的输入量。
(4)起降装置根据得到的力信号的无人直升机惯性测量单元(IMU)信号控制起降装置的姿态,保证机身的水平和各条腿的载荷平均分布。
(5)起降装置到达设定最终姿态,且调整至稳定状态后,关闭电源,通过制动器保持支持,完成着陆。
2起降装置单腿设计方法
2.1理论模型
地形自适应起落装置采用相同设计的6腿结构,且各条腿独立控制,这里以单腿结构为例,详细描述起降装置的结构设计方法。单腿结构由连杆机构组成,驱动关节位于机架的上方,有助于增加其结构美观性和提高其抗冲击的能力。
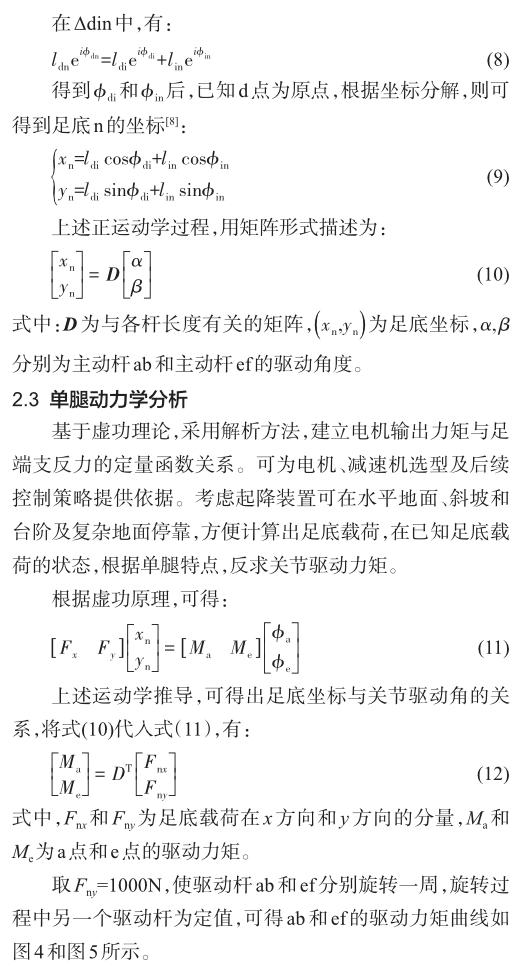
如图3所示,不考虑共用的旋转关节,单腿结构由两个四连杆机构abcd和efgd,以及一个平行四边形机构dghi组成,两个驱动关节安装于a点和e点。利用四连杆机构的死点位置设计,可有效降低对驱动元件输出力矩的要求,可充分利用死点位置开展仿生腿抗坠撞设计。
以足底运动范围满足复杂地形着陆条件为约束条件,以关节驱动力矩最小为优化目标,可确定单腿各连杆的长度参数,见表1。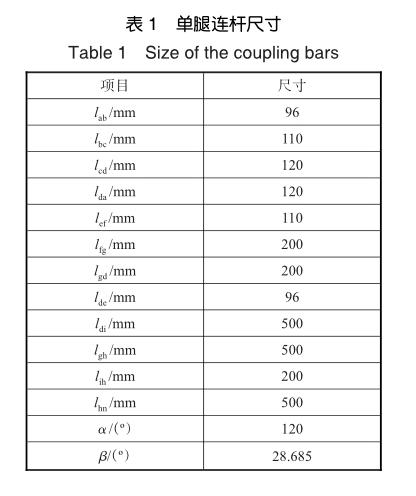
2.2单腿机构运动学建模
对于图3的机构设计图,基于刚体假设,采用解析法,构建单腿收放和起降过程的运动学和动力学理论分析模型,建立关节转角与足端坐标的定量函数关系。
由图4~图5可看出,ab杆或ef杆旋转一周,均存在两个死点位置,且其驱动力矩为0,两个死点中间存在一个急回区间,驱动力矩出现高峰;在死点两端区域,驱动力矩较小,为慢回区间,驱动力矩相对较小。实际着陆过程,两个连杆机构仅利用慢回区间,以降低驱动单元对驱动力矩的要求。
同时,在ab杆转动过程中,ef杆的驱动力矩始终保持不变。也即两杆的力矩自然解耦,ef杆的驱动力矩与ab杆的驱动角无关;同时,ab杆的驱动力矩也与ef杆的驱动角度无关。
3地形自适应着陆仿真与控制
3.1典型地形着陆仿真
限制两个关节的驱动杆ab和ef在结构允许范围内的运动,可以得到足端的实际运动空间,如图6所示。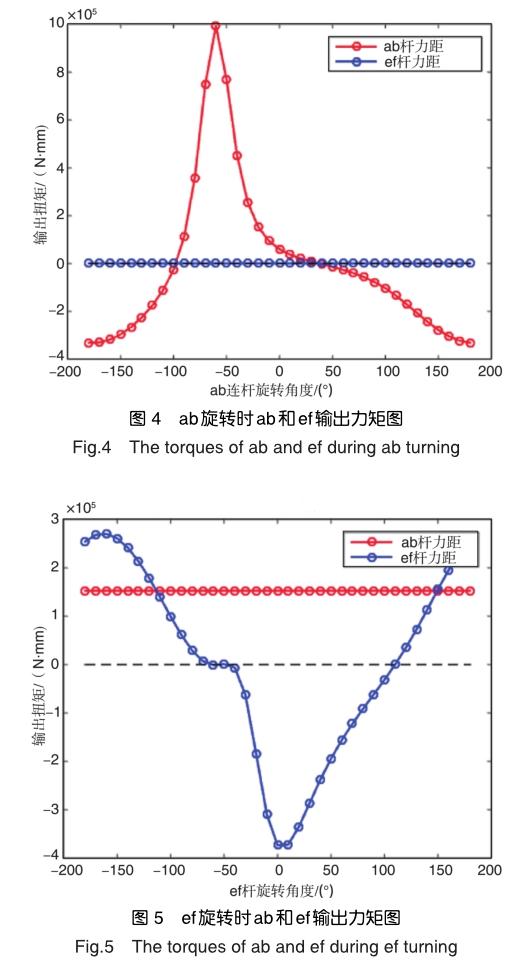
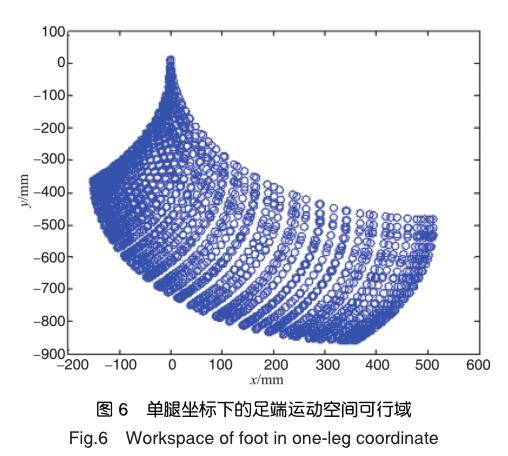
通过图6的足端运动空间可以看出,其可触达的运动空间主要集中在x向[-100,500],y向[-400,800]之间,运动范围较大,通过分析可得,对于侧向20°斜坡和200mm台阶,此设计腿式起落架可实现稳定支持。
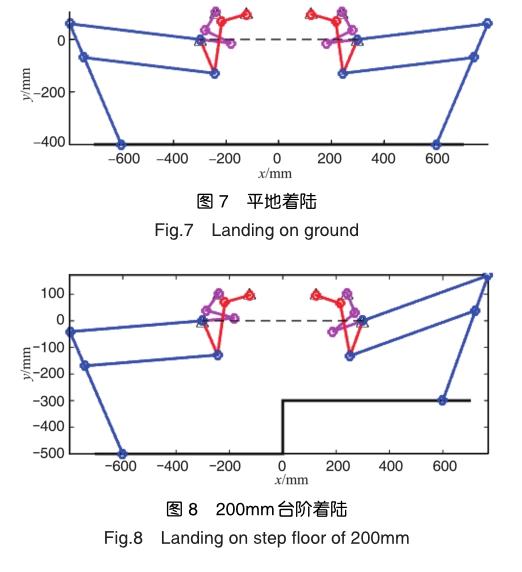
起降装置需要根据不同的地形姿态调整其姿态,完成不同地形的自适应着陆。着陆过程中,根据机身据地面的高度确定d点的坐标,再根据地形条件确定足端落点位置坐标,根据逆运动理论模型,解算出主动杆ab和ef的驱动角度和驱动力矩。考虑到着陆过程为缓慢过程,地形稳态支撑状态的研究对复杂地形的起降和停放具有研究意义。图7~图9给出典型地形的支撑状态。
3.2着陆控制
在起降装置着陆控制过程中,多采用逆运动学分析,即已知足端n的坐标,求解主动杆ab和连杆ef的驱动角。依然设定d点为坐标原点,假设已知足端n的坐标,求解主动杆ab和连杆ef的方位角。
对于起降装置控制,采用分别给定单腿足底坐标的方式完成着陆控制。此处给出单腿控制方法,说明控制的效果。
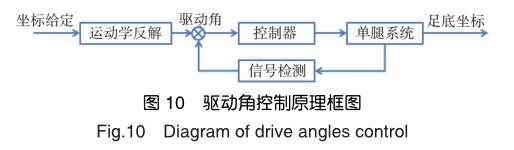
首先,以驱动杆ab和ef的输入角度作为控制量对单腿系统进行控制,控制原理如图10所示。其过程描述为在已知目标的足底坐标情况下,通过运动学反解,得到需要的系统输入驱动角给定值,通过增量式比例積分微分(PID)比较驱动角的实际值与给定值,进而确定输入驱动角的控制量,已达到控制驱动角的目的,通过驱动角实现单腿系统的控制。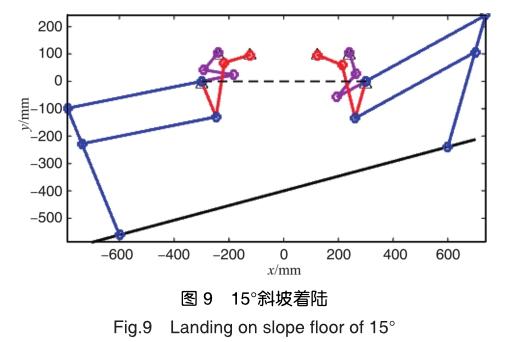
控制单腿足端从某点运动到垂直支撑状态,及足底坐标的给定值为(500,-500)。通过解算得到驱动杆ab和ef的输入值,控制仿真结果如图11和图12所示。
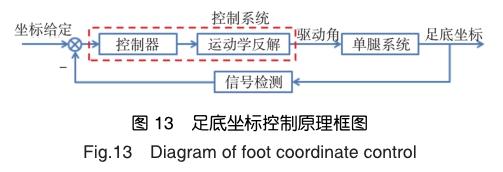
然后,还可采用另一种单腿控制的方法,即单腿系统的给定信号为坐标的预设值,与实际的足底坐标信号作比较得到输入信号偏差,通过由运动学反解和PID控制器共同组成的控制系统,形成单腿系统所需的驱动角,将驱动角给如单腿系统获得现在时刻的足底坐标,通过传感器监测系统获取足底坐标的真实值,作为系统反馈的条件。控制原理图如图13所示。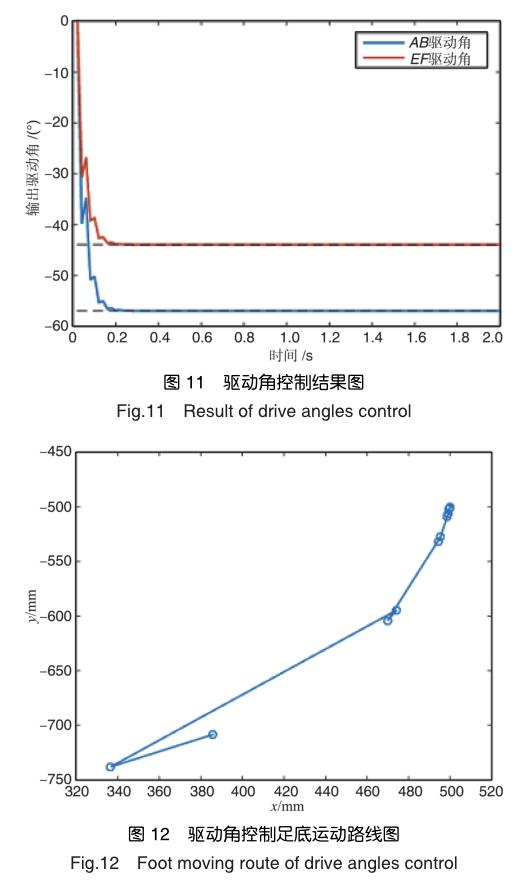
采用同图12相同的起止点坐标进行控制仿真,其控制结果如图14和图15所示。
通过比较两种控制结果可以看出,两种控制方法均可以达到预想的控制效果,均无超调量,控制时间均在0.2s左右。对比足底运动轨迹,对于足底坐标的直接控制运动轨迹更优,对于驱动杆角度的控制方法在运动过程中存在明显的振荡,所以综合看来对于足底坐标的直接控制更有利于起降装置的腿部运动控制。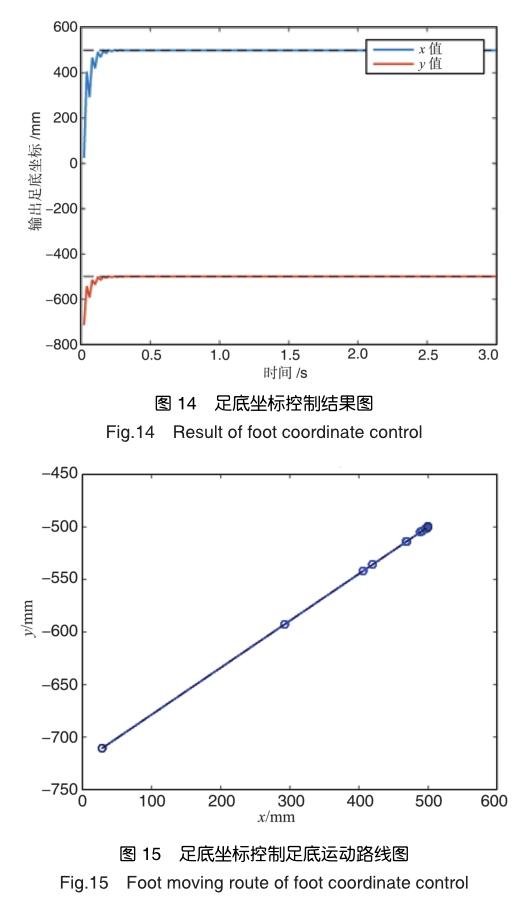
4结论
本文提出了一种基于无人直升机的地形自适应起降装置的设计方法,在给出具体设计方法的基础上,通过Matlab仿真给出典型的不同地形条件下的着陆情况,可得到如下结论:
(1)对于无人直升机,可采用腿式起降装置完成地形自适应着陆,连杆机构和驱动关节的构型设计可用于起降装置。
(2)通过控制四连杆就够的驱动杆ab和ef,或者控制足底坐标均可完成地形自适应着陆。
(3)对足底坐标的直接控制有利于起降装置的着陆控制效果,减少运动过程中的振荡情况。
参考文献
[1]Spanoudakis P,Tsourveloudis N C,Valavanis K P. Design specifications for an unmanned VTOL[C]// Proceedings of the 2004IEEEInternationalConferenceonRoboticsand Automation,2004:3616-3621.
[2]Do K D,Jiang Z P,Pan J. Global output feedback tracking control of a VTOL aircraft[C]//Proceedings of the 42th IEEE Conference on Decision and Control,2003:4914-4919.
[3]吴蔚. NASA明确未来25年航空研究工作重点[J].航空科学技术,2020,31(4):81-82. Wu Wei. NASA clarifies priorities for aviation research in the next 25 years[J]. Aeronautical Science & Technology, 2020,31(4):81-82.(in Chinese)
[4]宋欣嶼,王英勋,蔡志浩,等.基于深度强化学习的无人机着陆轨迹跟踪控制[J].航空科学技术,2020,31(1):68-75. Song Xinyu, Wang Yingxun, Cai Zhihao, et al. Landing trajectory tracking control of unmanned aerial vehicle by deep reinforcement learning[J]. Aeronautical Science & Technology, 2020,31(1):68-75.(in Chinese)
[5]胡重阳,梅涛,刘彦伟.仿生六足机器人机构设计及控制方法研究[J].机械科学与技术,2014,11(33):1621-1627. Hu Chongyang, Mei Tao, Liu Yanwei. Research of control method and mechanism design of bio-inspired hexapod robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2014,11(33):1621-1627. (in Chinese)
[6]汪岸柳.月球着陆器软着陆动力学与半主动控制研究[D].南京:南京航空航天大学,2011. Wang Anliu. Investigation on the soft-landing dynamics and semi-active control for lunar lander [D]. Nanjing: Nanjing University ofAeronautics andAstronautics, 2011.(in Chinese)
[7]黄林考,谭跃刚, David N,等.四足机器人仿生腿结构特性及其控制系统研究[J].机械设计与制造,2018,5(S1):150-154. Huang Linkao, Tan Yuegang, David N, et al. The research of bionic leg architecture character and control system for quadruped robot [J]. Mechaninery Design and Manufacture, 2018,5(s1):150-154. (in Chinese)
[8]徐艳妮.基于MATLAB的平面连杆机构综合与分析[D].西安:西安科技大学,2014.Xu Yanni.The synthesis and analysis of planar linkage based on MATLAB[D]. Xian: Xian University of Science and Technology, 2014.(in Chinese)(责任编辑陈东晓)
作者简介
任佳(1990-)女,硕士,工程师。主要研究方向:控制系统与优化、冲击动力学试验与分析。
Tel:029-88268285E-mail:renjiabest@163.com
王计真(1987-)男,硕士,工程师。主要研究方向:冲击动力学。
Tel:13087501018
E-mail:wangjizhen623@163.com
刘小川(1983-)男,博士,研究员。主要研究方向:冲击动力学。
Tel:029-88268663
E-mail:asri02@163.com
Landing Design and Control Simulation in Complex Terrain Conditions
Ren Jia*,Wang Jizhen,Liu Xiaochuan
Aviation Key Laboratory of Science and Technology on Structures Impact Dynamics,Aircraft Strength Research Institute of China,Xian 710065,China
Abstract: In order to solve the problem that aircraft cannot land under complicated terrains, researches on the design and control methods of landing devices are proposed. A six-legged structure is designed and a method of landing on complex terrain is proposed in this paper, and the software of Matlab is used to simulate the landing performance and control method. The results show that the device can effectively meet the landing requirements under complex terrain condition. Then landing control can be realized by controlling the drive bar angle and foot coordinates, but effect of controlling the foot coordinates is better.
Key Words: device of landing and take-off; complex terrain; landing design; control
