基于PLC的正交脉冲接口电路
2020-02-04邓国华
邓国华
(湖北职业技术学院 湖北省孝感市 432100)
1 引言
电子手轮、编码器及光栅尺等部件广泛应用于各种机床位置控制,由于这些部件输出的是A 相和B 相正交脉冲信号,其周期和幅度相同,相位差90°。正相工作时A 相超前B 相90°,反相工作时B 相超前A 相90°。对于不太复杂的位置控制,用PLC 通过正交信号能够完成位置检测和控制,但现在大部份PLC 不能直接识别正交脉冲信号。本接口电路采用边沿D 触发器将A、B 两相正交脉冲信号转换为脉冲和方向信号,直接与PLC 相连,将脉冲信号接到PLC 高速计数端(X0),方向信号接到PLC 输入端(X1)。这样,PLC 通过内部的C235 高速计数器就能完成位置检测。
2 边沿D触器工作原理
D 触发器是一种具有记忆功能的信息存储器件。其具有两个稳定状态:0、1,分别对应电路中的低电平和高电平。在一定的外界信号作用下,触发器可以从一个稳定状态翻转到另一个稳定状态[1]。本设计采用是边沿D 触发器,其内部逻辑框图和符号如图1所示。
S 和R 可分别将D 触发器的Q 端置1 和置0,低电平有效。当S=0 并且R=1 时,无论触发器的D 信号是高电平还是低电平,CLK 信号是否触发,都会将Q 置为高电平,也就是将其输出端Q 置1;当S=1 并且R=0 时,不论触发器的D 和CLK 是何种状态,触发器的输出都被设置为低电平,即其Q 端置0。所以S 和R 又称为D 触发器的置1 和置0 端。边沿触发器工作过程如下:CLK 由1 跳变到0 时或CLK=0 时,与非门G3 和G4 的输入端为0,他们的输出Q3 和Q4 都为1,此时,只要S=R=1,则不论触发器的输入信号D 是何种状态,触发器的输出端Q 的状态保持不变。
当CLK 由0 跳变到1 时,如果D=0,与非门G5 的输出端Q5=1,G3 的Q3=0,G6 的Q6=0,G4 的Q4=1,此时触发器输出端Q=0;如果D=1,与非门G5 的输出端Q5=0,G3 的Q3=1,G6的Q6=1,G4 的Q4=0,此时触发器输出端Q=1。由此可以看出当CLK 信号从0 到1 跳变时,D 触发器的输出状态Q=D。
CLK 由0 跳变到1,触发器完成翻转后,如果此时CLK 一直为高电平,则触发器的输入信号D 被封锁。这是因为G3 和G4 的输出Q3 和Q4 的状态是互补的,即必定有一个是0,如果Q3=0,则G3 输出的低电平将G5 封锁,即阻断了D 信号通往基本RS 触发器的路径;G3 输出的低电平起到了使触发器维持在0 状态和阻止触发器变为1 状态的作用。如果Q4=0 时,将G3 和G6 封锁,D信号通往基本RS 触发器的路径也被阻断。Q4 输出的低电平起到使触发器维持在1 状态的作用和阻止触发器置0 的作用。因此,该触发器是在CLK 上升沿前接受输入信号,上升沿时触发翻转,上升沿后输入即被封锁,所以称之为边沿触发器。从分析可以看出,边沿D 触发器抗干扰能力很强,只在CLK 上升沿触发时,输入信号才起作用,其他时间段,其输出状态不受输入信号影响。其状态转移图和工作波形如图2[2]。

图1:边沿D 触发器其内部逻辑框图和符号
3 接口电路设计原理
由于边沿D 触发器具有很强的抗干扰能力,而且电路工作可靠、速度快等优点[3],本电路采用74ALS74 型边沿触发器。接口电路原理图如图3所示。
电子手轮等部件输出(NPN 型开集电极输出)的A 相信号分别连接到U1A 与非门的输入端和U4A D 触发器的D 端,B 相信号连接到 U4A D 触发器的CLK 端。A 相信号经过U1A 与非门反相后送给三极管Q3 再次反相,然后驱动U2 光耦输入端,其输出端与PLC 的高速计数端X0 相连。A 相信号在经过两次反相后与X0信号相位相同。
当有正相正交脉冲输出时,由于B 相信号与U4A CLK 相连,A 相脉冲超前B 相90°,B 相脉冲上升沿总是对应A 相脉冲高电位,也就是U4A 的每个CLK 端脉冲上升沿触发时,U4A D 触发器的D端总是高电位,此时D 触发器的Q 端就一直是高电平。

图3:接口电路原理图
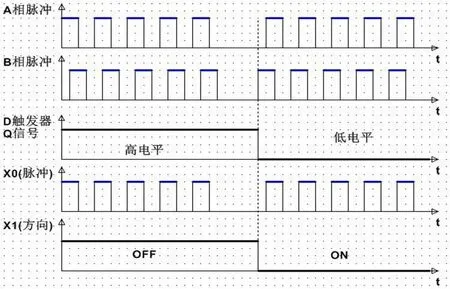
图4:接口电路时序图

图5:脉冲计数梯形图
当有负相正交脉冲输出时,B 相脉冲超前A 相90°,B 相脉冲上升沿总是对应A 相脉冲低电位,也就是U4A 的每个CLK 端脉冲上升沿触发时,U4A D 触发器的D 端总是低电位,此时D 触发器的Q 端就一直是低电平。
通过D 触发器的Q 端电平的变化就能判断出正交脉冲是正相还是反相。D 触发器U4A 1Q 端信号经过U1A 与非门反相后送给三极管Q4 再次反相,然后驱动U3 光耦输入端,其输出端与PLC的输入端X1 相连。这样就通过D 触发器将正交脉冲信号转换成脉冲和方向信号,便于PLC 处理。X1 是高电平(OFF)时,PLC 内部计数器做增计数,电子手轮等在作正向工作,X1 是低电平(ON)时,PLC 内部计数器做减计数,电子手轮等在作负向移动。在本电路中,D 触发器的R、S 端都接到高电平。其接口电路时序见图4。
电路中U1 与非门的作用主要是为了给脉冲整形并保证PLC 接收到的信号与电子手轮等输出的正交信号相位一致。与非门的输出电流太小,不宜直接驱动光耦的输入端,所以采用三极管进行电流放大,然后驱动光耦。采用4N35 高速光耦的主作用为是为了提高抗干扰能力和进行电源电压转换,因为TTL 芯片的电源电压只有5V,而一般PLC 输入端电压是24V。
4 应用及注意事项
此接口电路已经用于FX2N 为控制系统的曲轴磨床和修整器等设备与电子手轮、位置编码器联接,脉冲计数梯形图如图5。
X010 是开始计数命令,X1 OFF 时,M8235 不动作,C235 增计数(正相);X1 ON 时,M8235 动作,C235 减计数(负相)。C235 的计数值就是当前位置。D100 可设定正、反向限位值。实际应用中有两点要注意:首先接口电路板与电子手轮等部件之间的距离要尽可能短,避免线长引入干扰。其次FX2N X0 单相脉冲计数频率不能大于60KHz[4],对于电子手轮这个频率足够。但对于编码器或光栅尺来说,如果脉冲当量为1μm,,其移动速度不能大于60mm/s,不过对于要求不高的场合,这个速度能满足要求。
5 结束语
本文介绍的正交脉冲接口电路结构简单、成本低、实用性强,已在机械设备上稳定可靠使用多年。它既可作为PLC 的接口电路也可用于单片机或其他控制器的接口电路。如果电子手轮或编码器输出是26LS31 芯片驱动的差分信号时,可在本电路的D 触发器前端加1 个26LS32 芯片,将每相双路输出转换成每相单路输出,即能完成将差分正交脉冲信号转换成脉冲和方向。
