基于多特征的车载影像车道线检测算法
2020-02-03杨羚
杨羚
(华设设计集团股份有限公司 江苏省南京市 210014)
先进驾驶辅助系统[1-3](Advanced Driving Assistance System,ADAS)能够辅助人工驾驶以减少交通事故,近年来逐步成为自动驾驶领域中的研究热点。车道线自动检测技术是ADAS 中的关键技术之一,通过车道线的检测可分析自动驾驶车辆行驶车道的相对位置,进一步能够判断车辆行驶过程中是否发生车道偏离现象,从而及时发出预警信息提醒驾驶人员,避免事故发生。当前,国内外学者提出的车道线检测算法可以归纳为基于单特征的车道线检测方法[4-5]、基于模型的车道线检测方法[6-7]以及基于深度学习的车道线检测方法[8-10],本文在对这些方法进行优缺点分析后提出利用车道线颜色、位置和形状多种特征协同判断的算法,实验表明,本文算法在无训练样本数据和复杂检测模型的情况下依然具有较好结果。
1 车载影像车道线自动检测算法
本文车道线自动检测算法流程如图1所示,首先对影像进行预处理,通过灰度变化和ROI(兴趣区域)提取获得主要处理区域,减少处理数据量,然后先进行高速滤波将影像上的噪声去除,再利用Canny 算子检测边缘,将线特征增强,最后通过Hough 变换提取线段并对提取线段的斜率进行限制得到最终检测的车道线结果。
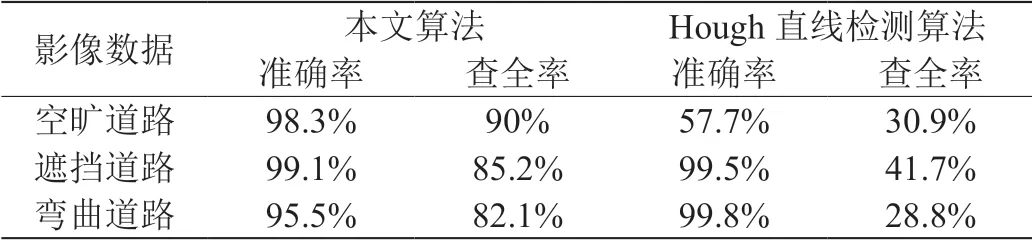
表1:算法准确率与查全率结果
1.1 图像预处理
考虑到车道线一般为黄色或者白色,在红色和绿色空间中,黄色和白色相对于其他颜色对比度更加明显,因此对于所采集的自动驾驶车载影像,需要将影像从RGB 彩色空间变换到灰度空间中,采用公式(1)进行影像色彩空间转换。

式(1)中,R,G,B 表示原影像在红、绿、蓝三个通道上的分量,a1、a2、a3 分别表示各个通道的权重系数,其中a1+a2+a3=1。由于黄色和白色车道线在蓝色通道上反应不明显[11],故一般取a1=a2=0.5,a3=0 可以远好于a1=a2=a3=0.33 的传统灰度变化公式。
驾驶车辆行驶时,摄像机一般安装在车辆正前方,车道线均处于道路灭点的下方,并且镜头拍摄到的车辆所在车道一定位于画幅中央部分,为减少数据处理工作量,取影像下方二分之一的中央二分之一画幅作为ROI 区域。如图2所示为影像预处理结果,红色框线为ROI提取区域,提取ROI区域后可以将与目标不相关的信息(如天空、房屋等)去除,避免冗余信息对检测过程的干扰,提高车道线检测精度。

图1:车载影像车道线自动检测算法流程图

图2:影像预处理结果
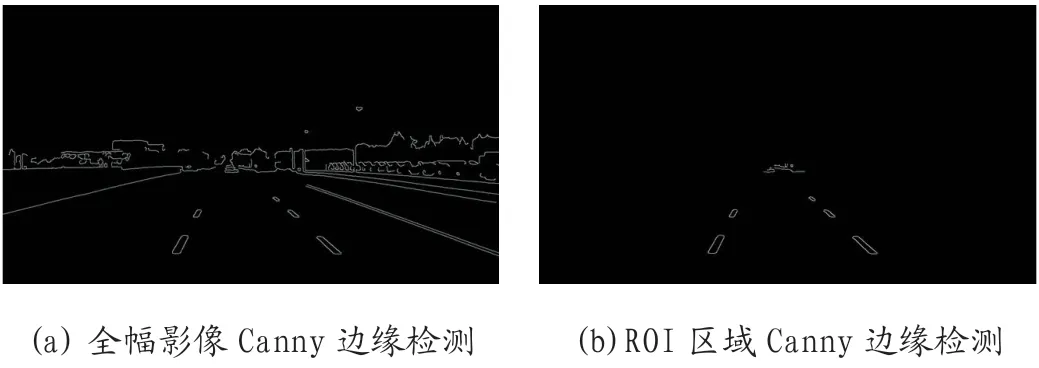
图3:Canny 算子边缘增强结果
1.2 基于Canny算子的边缘增强
Canny 算法[12,13]Canny 算法的核心在于它使用离散性差分算子近似一阶偏导数,寻找图像灰度跃变位置,表示图像边缘。车道线由于铺设了黄色或白色的漆面,与灰色的路面在边缘处会有明显的阶跃现象,Canny 算子在0°、45°、90°135°这四个方向上寻找产生阶跃的像素点,在找到阶跃像素点后采用非最大抑制技术消除误检边,本文进行边缘检测后的结果如图3所示。
1.3 基于条件限制的Hough变换
Hough 变换是把原始影像空间中的直线通过曲线形式变换成Hough 空间中的一个点,将原始影像中的直线检测问题转化为Hough 空间中峰值点的寻找问题[14]。传统的Hough 变换直线检测不在车道线检测中的适用性不高。
本文通过分析车载影像的车道线发现,车道线一般位于车辆上摄像机采集影像的两边,并与车道的中线有一定的夹角,所以Hough 变换检测出的直线的斜率k 会在一个范围内,即kmin<k<kmax,于是本文提出了基于斜率限制条件下的Hough 变换算法,具体限制方法流程如图4所示。图中t1 和t2 为根据经验设定的斜率阈值,km 为提取线段的斜率均值,t1+km=kmin,t2+km=kmax,由此确定斜率k 的范围。针对本文实验数据t1 取0.1,t2 取0.3 时结果较好。
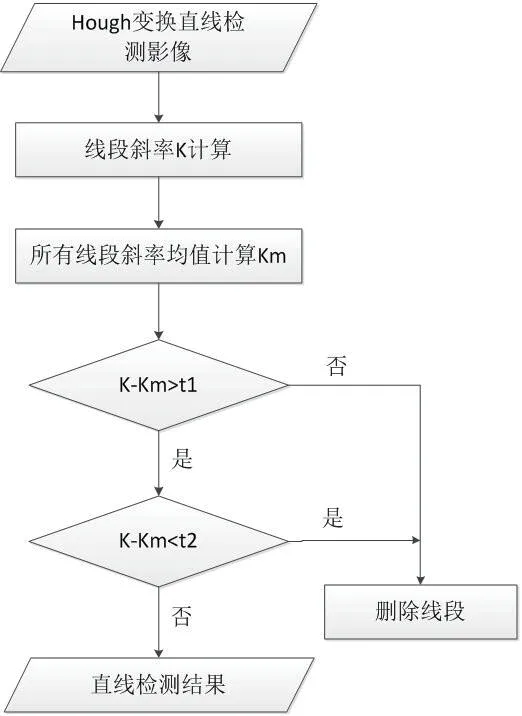
图4:条件限制下的Hough 变换流程
2 实验结果与分析
2.1 实验数据
为验证本文车道线检测算法的可行性,在郑州龙湖中环路上进行实验采集车辆行驶中的影像数据,采集的车载视频时长约12 分钟,从中截取约多组影像作为实验数据,影像分辨率为1280*720,采集的影像包括直线行驶路段、弯道行驶路段、高架行驶路段、树荫遮蔽路段等多种路况条件。并与未经条件限制的Hough 变换直线提取结果和人工勾选的样本进行对比实验。

图5:不同行车条件下车道线检测效果
2.2 实验结果目视评价
本文选取三组具有代表性的实验数据,并将人工勾选的样本数据作为真值,同时为了验证实验的有效性,采用相同数据与未经条件限制地Hough 变换直线检测算法进行对比实验,对比实验结果如图5所示,第一行为空旷道路车道检测线不同算法检测效果、第二行为树荫遮挡路段不同算法车道线检测效果、第三行为转弯路段不同算法车道线检测效果。
实验结果目视判读可知,本文提出的基于车载影像的车道线检测方法能够适应用多种路况下的精度检测要求,能够满足复杂城市交通状况下的检测要求。与未经条件限制地Hough 变换直线检测算法相比,由于本文算法在进行车道线直线提取时,对Hough 直线变换进行了斜率条件限制,因此能够滤除掉部分错误提取的偏水平方向的直线。
2.3 实验结果定性评价
三组实验数据定量分析结果如表1所示。
从表1 定量分析结果可知,以人工勾画的车道线为真值,本文检测算法对于三组影像的准确率均在95%以上,查全率在80%以上,说明本文算法在保证检精度的同时能够覆盖较多的检测范围。Hough 变换直线检测算法由于检测出的线段没有做拟合,检测的线段长度短,因此对于图5 第二行遮挡道路、第三行弯曲道路检测的准确率较高但查全率却无法满足需求。对于图5 第一行空旷道路影像Hough 直线检测算法准确率低的原因是没有根据斜率将错误检测出的线段剔除,导致ROI 范围内的非车道线的水平线段也被检测出来。
综上,不论从目视判读还是对结果的定量计算,本文算法明显优于Hough 直线检测算法。
3 结论
本文针对车辆行驶过程中拍摄的影像,提出了一种基于多特征的车道线检测方法。该方法通过影像预处理保障了后续识别的准确度,然后通过高斯滤波和Canny 算子增强车道线的边缘特征,最后利用斜率条件限制下的Hough 变换检测出最后车辆行驶两侧车道线,并确定车道范围。实验结果表明,本文方法能够适用于实际道路场景,特别是在路况较好、干扰较少的条件下检测结果较高,然而,本文算法在道路拥堵路段和车道线被大面积磨损褪色的场景下检测效果不佳,未来可考虑更多复杂场景下甚至对车载视频的实时车道线检测方法研究。
