双极性限流式驱动电路的设计与实现
2020-02-03王怀侠孙宇伟郭燕红李楠黄凯
王怀侠 孙宇伟 郭燕红 李楠 黄凯
(北京精密机电控制设备研究所 北京市 100076)
三冗余机械反馈伺服阀的阀线圈采用三冗余控制方式。伺服机构的位置与阀电流成正比,传统单路伺服控制中,当阀电流控制电路中出现异常,导致阀电流异常时伺服机构位置就会出现异常且无法被纠正。三冗余控制方法则在数字指令输出前,对三个阀电流进行判断,如果正常,则将数字指令平均分配给三路D/A 转换器,如果一个阀电流被判异常,则在数字指令分配时,由另两路进行补偿,即能实现单路输出效果等同于三路输出的功能。所以输出电流范围较大,远远超过现有的电液反馈伺服阀的电流;
另外,伺服作动器需要实现双向动作,从而要求伺服阀电流是双极性。伺服作动器还需要对行程进行限位,即需在电路中增加伺服阀电流的限流保护功能。
针对上述需求,本文设计了一种双极性限流式高压驱动电路。本文从电路设计、限流保护、电路参数选取等方面进行了详细的介绍,该电路可满足三冗余机械反馈伺服阀电流的宽范围输出的要求,并能实现电流的双极性。而且电路中有限流保护设计,可对伺服作动器进行行程限位。
1 电路设计
电路设计需满足以下几点需求。三冗余机械反馈式伺服阀输出电流范围较大,远远超过现有的电液反馈伺服阀的电流,所以需要驱动电路能够满足大电路输出需求;伺服座动器需要实现双向动作,所以要求伺服阀电流是双极性的;伺服作动器需要对行程进行限位,即需在电路中增加伺服阀电流的限流保护功能。
伺服机构为机械反馈式,伺服阀饱和电流设计为48mA,考虑极限情况下有12mA 的温漂补偿,共60mA,正常工况下,平均分配给3 路,在发生一度故障时,极限情工况下要求单通道能输出60mA,该电流已远远超出电液反馈伺服阀的电流要求。
电路设计包含主电路,驱动电路和控制电路。其中主电路为DSP 芯片通过A/D 采样获取当前伺服机构状态,再根据闭环控制参数和相应的控制算法计算出本周期的数字控制输出。之后,通过D/A 转换芯片,转换成模拟小信号进入驱动电路。驱动电路对信号进行处理放大后输出给控制电路。控制电路驱动伺服作动器,从而完成伺服机构的最终运动实现。
驱动电路位于主电路和控制电路之间,可实现对控制电路的放大功能,通过调节输出阀电流的大小进而控制作动器位置,实现控制功能。功率放大电路是驱动电路的一部分,该电路主要是由伺服放大器及其外围电路组成,由D/A 输出指令信号的功率放大,为伺服线圈提供电流信号,为避免功率放大器过流失效,设计放大器限流保护电路;同时,为避免放大器不带阀线圈负载时开路输出和伺服作动器行程超出限位,设计放大器限流保护电路。
为满足大范围电流输出的需求,设计时选用可±30V 电源供电的高压功率放大器。电路图如图1,DSP 通过并行数据总线将阀电流数据传输给16 位的D/A 转换器,D/A 转换器将0V~+5V 的信号输出至功率放大器U1,功率放大器以+5V 参考源为基准,将单向0V~+5V 电压信号转换成双向-5V~+5V 的电压信号;
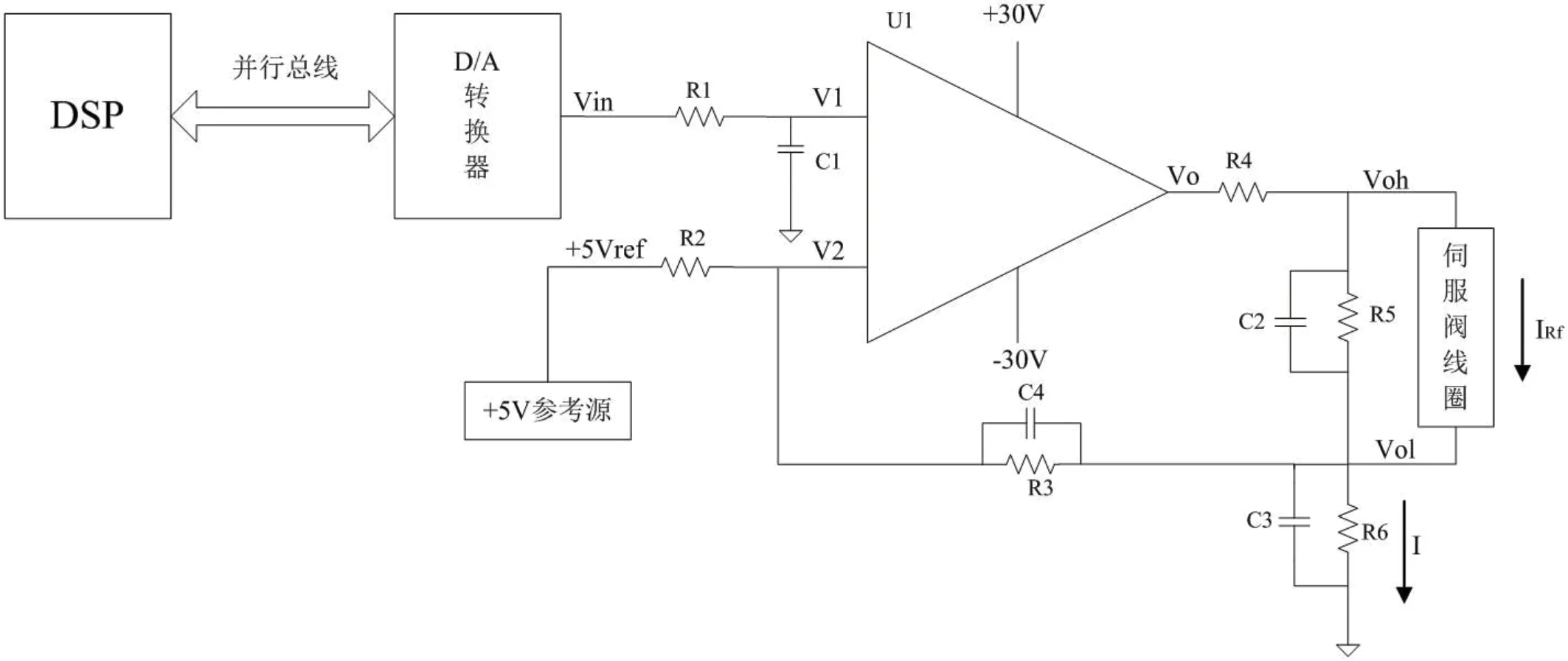
图1:电路框图

表1:功率放大电路电阻电容参数值
选用的功率放大器为低功耗高压驱动电路,输出电压范围较宽,为+4V~+30V 供电,持续数传电流较大可达200mA,为单通道输出,转换速率高达15V/us,该器件噪声较低,且期间内部具有热关断传感器,当功率放大器结温达到160 摄氏度即可自行关断,热关断标志引脚标会输出电流提示。该器件带宽较宽,为3MHz,器件工作温度可达-40 摄氏度至150 摄氏度,可以满足使用要求。
功率放大电路采用±30V 供电,功率放大器最大输出电压Vo约为±28V;Voh 和Vol 通过电缆接到伺服阀线圈上。Vin 为D/A 转换器的输出端接口,+5Vref1 为+5V 参考电压,U2 为功率放大器件,R1 为正向输入电阻,R2 为负向输入电阻,R3 为反馈电阻,R6 为取样电阻,R4 为限流电阻。R5 为空载时高低端保护电阻,为避免放大器不带阀线圈负载时开路输出,设计开路保护电路,提高功率放大电路的可靠性。
2 双极性设计
双极性电路设计为满足伺服阀电流是双极性设计的需求,在功率放大器的输入端电压为0V ~+5V 的情况下,需要实现输出端-5V ~+5V 的信号变化范围。
系统中D/A 转换器的输出范围为0 ~+5V 的单向电压,本电路使用+5V 参考源+5Vref,将Vin 输入的单向0V~+5V 电压信号转换成双向-5V~+5V 的电压信号:
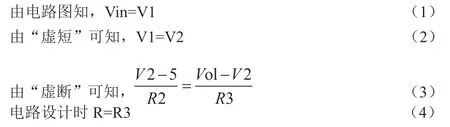
由(1)~(4),可知Vol=2Vin-5,即Vin 的范围为0 ~5V 时,Vol 的输出范围为-5V ~+5V。
通过上述功率放大电路实现了双极性的电压信号输出,从而实现了伺服阀电流的双极性。
3 限流设计
限流电路在电子电路中应用广泛,指的是通过适当的设计从而使在正常或者某些故障条件下,从该电路流出的电流不会太大,不会对电路造成危害,从而保证其他元器件的工作安全。采用电阻限流,设计简单,适用于小电流的电路。
功率放大电路主要是由伺服放大器及其外围电路组成,用于D/A 输出指令信号的功率放大,为伺服阀线圈提供电流信号。为避免功率放大器过流失效,需为放大器设计限流保护电路。
另外,在实际应用中还有两种异常情况需要考虑。功率放大器不带阀线圈负载时,开路输出会对系统产生危害。另外,也同伺服作动器的行程如果超出限位也会对系统有不利影响。为避免功率放大器开率输出和作动器超出限位,设计放大器限流保护电路。在功率放大器输出端增加限流电阻,将放大器最大输出电流控制在60mA 以内。流过阀线圈的电流IRf计算如下:
阀线圈电阻Rf=298Ω,高低端空载保护电阻R5=400K,反馈电阻R3=100K,
因

可认为由R5 和R3 造成的分流忽略不计,即

又

由元器件手册知Vo 的最大输出电压约为±28V,项目要求R6=100Ω,所以由|IRf|≤60mA 可得限流电阻R4=68Ω。可通过限流电阻R4 来调节流过阀线圈电阻的最大电流,从而进行限流保护。
根据项目要求,设置和计算出功率放大电路的电容和电阻值见表1。此时,还需进行阻抗匹配,设计负向输入电阻R2 和反馈电阻R3 均为100K,正向输入电阻R1 为50K;设计反馈电阻并联电容C4 为20pF,伺服阀线圈并联电容C2 为0.33pF,采样电阻并联电容C3 为47pF。
4 结论
伺服机构的位置与阀电流成正比,在数字指令输出前,对三个阀电流进行判断,如果正常,则将数字指令平均分配给三路D/A 转换器,如果有一个阀电流被判异常,则在数字指令分配时,由另两路进行补偿,即能实现单路输出效果等同于三路输出的功能,所以输出电流范围较大,远远超过现有的电液反馈伺服阀的电流;且伺服作动器需实现双向动作,要求伺服阀电流是双极性;伺服作动器需要对行程进行限位,即需在电路中增加伺服阀电流的限流保护功能。本文针对三冗余机械反馈式伺服阀输出电流范围较大的问题,设计了双极性限流式驱动电路,可实现三冗余机械反馈伺服阀电流的大电流输出的要求,并能实现电流的双极性,且电路中有限流保护设计,相对于传统的阀电流驱动电路,输出电流的范围更大。该方案设计简洁、可靠、通用性好,具有良好的推广价值。
