基于融合梯度算子和数学形态学的车牌识别算法
2020-02-02唐瑜梅
唐瑜梅
(1.四川文理学院智能制造学院 四川省达州市 635000 2.四川文理学院达州智能制造产业技术研究院 四川省达州市 635000)
1 引言
图像边缘实际上是像素的集合,而这些像素所处的图像位置,灰度会突然变化或者是在梯度方向突然变化。边缘对人类视觉系统和数字图像处理技术的影响都很重要,它被认为是最重要的图像基本特征之一。图像的边缘含有重要的信息,在图像分割、图像模式识别和特征描述等领域得到了广泛的应用,边缘提取结果的精确度和细节信息的完整度将直接决定图像的后续处理情况。
经典边缘探测算法操作简单、可靠,而且非常成熟,但有不同程度的缺陷,因此对经典算法进行改善成为一个重点研究的方向。目前,利用数学形态学方法进行图像处理得到了广泛的研究和应用,在图像的分析和检测中发挥着重要的作用,主要处理方法是将结构元素作用于输入图像,得到输出图像。
虽然各种边缘探测方法相继出现,但是一直没有找到能够在各种情况下通用的图像处理方法。本研究旨在通过对比各种图像边缘算子检测技术,得出各种边缘检测算法优缺点和应用环境,为新的边缘检测方法的产生提供依据。图像的边缘检测在不同条件下,应根据实际情况,选择合适的边缘检测算子对图像进行处理,才能得到理想的最佳效果。若单一一种边缘检测算法不能达到理想的效果,可采取两种或者多种方法结合。因此,可以将各种边缘探测方法进行融合,得到的检测效果比以前单个检测算法实验结果更好。
2 Prewitt算子、Sobel算子
经典的边缘检测算子可以分为以一阶导数为基础的算子和以二阶导数为基础的算子两类。本文对该研究使用的Prewitt 算子和Robert 算子进行简单介绍,他们以一阶导数为基础。
一阶导数算子的梯度算子,位置(x,y)的梯度在一个连续的图像f(x,y)中可以用矢量表示。沿x 方向的梯度用Gx表示,y 方向的梯度用Gy表示,则梯度矢量表达式如公式1所示。

δg和g(x,y)分别表示梯度方向和梯度幅度,其表达如公式2、3所示。

图1:Robert 算子的模板

图2:Prewitt 算子的模板
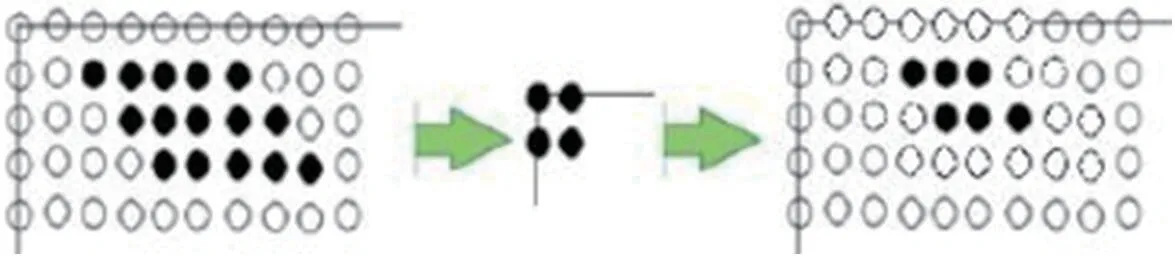
图3:腐蚀示意图
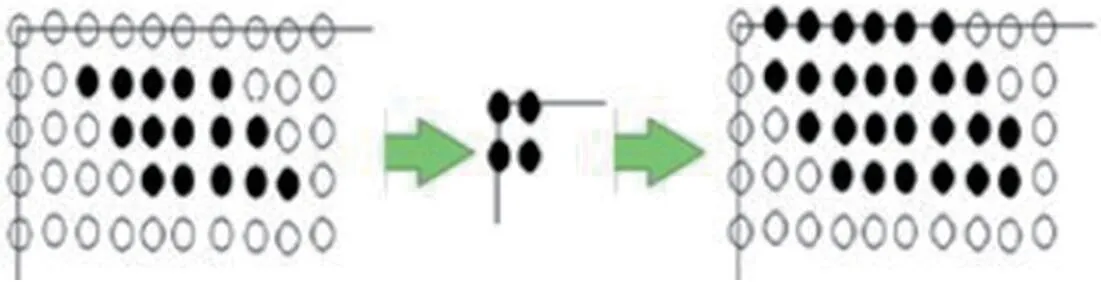
图4:膨胀示意图

对于离散的数字图像处理,为了方便通常使用差分运算,公式如下:

梯度算子可以由Gx和Gy两个模版组成。不同模板的大小,元素值不同。Roberts 算子使用两个2×2 模板,Prewitt 算子使用两个3×3 模板。
2.1 Robert算子
Robert 算子利用图像中邻近的四个像素,将像素灰度值与模板中的值进行乘法运算,再进行加法操作后得到。本研究选用模版如图1所示。

图5:原始图片
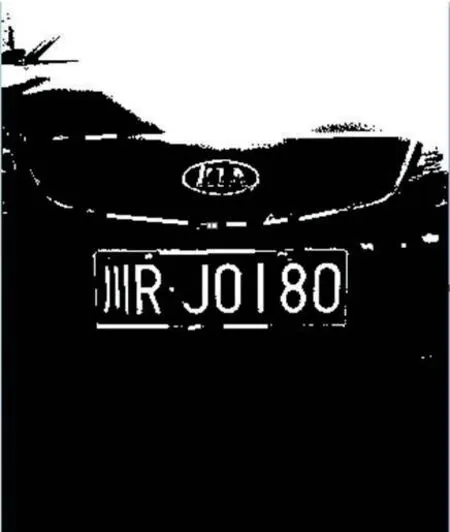
图6:Prewitt 边缘检测

图7:Robert 边缘检测

图8:融合处理边缘检测
2.2 Prewitt算子
Prewitt 边缘检测算子两个卷积核分别与图像中的各个像素点进行卷积运算,在水平方向和垂直方向取得最大值。针对高斯噪声,该算子有较好的抑制效果并且具有较高运算速度。本研究选择的模版如图2所示。
3 基于形态学基本原理及其边缘提取算法
数学形态学的基本运算是腐蚀、膨胀、闭合、开启。运用这四种基本运算可推导出各种组合运算,还可以构成各种进行图像处理和分析的实用算法。
3.1 腐蚀、膨胀运算
腐蚀运算是消除目标图像连通的边缘,使其向内收缩,其目的是使连接的目标图像分离,达到降低噪声的目的。腐蚀运算是通过去除边界点达到缩小目标、增大孔洞的效果,有效剔除噪声点影响。膨胀是将目标融合到背景当中,进行填充,向外部扩展,达到将断裂开的目标物进行连通的目的,便于对其目标边界的提取。腐蚀运算和膨胀运算如公式(5)、(6)所示。其结构示意图如图3、4所示。

3.2 开运算和闭运算
开运算的方法是先对目标图像进行腐蚀操作再进行膨胀的运算方法,闭运算与之相反。通常被用来消除图像中的小孔,填补轮廓破裂使它更光滑。针对车牌,闭运算可以填充车牌内部空洞,使车牌内部连通,从而进行车牌定位;开运算可以消除小的噪声,平滑形状边界。开运算公式如公示(7)所示,闭运算公式如公式(8)所示。

4 算法改进
本研究利用Prewitt 和Robert 两种算子检测得到的图像进行融合叠加处理,再将处理结果进行数学形态学基本运算。通过图像融合可以将两种Prewitt 算子和Robert 算子有效结合,得到更为完善的边缘信息。最后将融合后的边缘检测结果进行闭运算,通过对图像的膨胀与腐蚀补充缺损轮廓,填充边缘信息,使得边缘图像更为平滑。
首先,利用Prewitt 和Robert 两种算子,利用图1、图2 给出的模板进行局部运算,分别得到两种算子边缘检测图像,通过Matlab 仿真后,如图6、图7所示。随后,分别求取两个边缘检测图像各像素点的像素值,并将同一位置的像素值进行加权平均计算,这里将通过Prewitt 边缘检测图像得到的像素加权值设定为0.6,对通过Robert 边缘检测图像得到的像素值加权设定为0.4。以此进行加权计算得到融合叠加图像。最后对图像进行先膨胀后腐蚀的闭运算。最终得到更为清晰的边缘检测图像,如图8所示。
Roberts 算子对图像边缘处理的精确度较高,但是连续性较差,容易失去一部分边缘信息,对噪声的抑制作用较差,适用于低噪声图像;Prewitt 算子对噪声有一定的抑制效果,边缘定位效果好,但连续性差,适用于噪声图像和灰度渐变图像。经过融合加权平均处理后的边缘比较清晰,并且通过闭运算后可以得到更为平滑的车牌轮廓,本文研究方法对传统边缘检测算法具有一定的改进。
