离心压缩机轴系悬臂振型对振动影响的实例分析
2020-01-18
(沈阳鼓风机集团股份有限公司)
0 引言
离心压缩机组开车时,时常会出现机组在工作转速附近振动缓慢爬升的现象,即使转速保持不变,振动依然无法保持稳定。该振动频率主要表现为工频,且联轴器侧的振动较大。解决该类问题的办法通常是首先检查轴系对中和轴瓦间隙情况,如果都满足设计要求,就需要进行现场动平衡,甚至转子返回厂家进行高速动平衡处理[1-2]。
通过调整轴系对中、轴瓦间隙及做现场动平衡依然无法解决该问题。经过理论分析及现场检查,发现导致该类问题的原因为联轴器质量过重及联轴器重心距离临近的支撑轴承过远,使轴系的悬臂振型在很低的转速下被激发出来,该振型的固有频率与压缩机工作转速频率过于接近,即隔离裕度不够导致机组振动无法稳定[3-4]。
1 实例介绍
某厂合成气压缩机,电机驱动,行星齿轮式变速箱,设计工作转速11 900r/min,一阶临界转速4 850r/min,二阶临界转速18 160r/min,联轴器为膜盘联轴器,该联轴器质量较重,且联轴器的重心位置距离临近的压缩机支撑轴承较远。变速箱为行星齿轮式,变速箱与压缩机之间的轴系没有支撑轴承,故会使压缩机跨距之外的轴系部分支撑刚度减弱,会使轴系悬臂振型对应的固有频率降低[5-6]。
压缩机转子总长为2276mm,支撑轴承跨距为1744mm,转子上装配有叶轮、圆盘、推力盘、平衡盘等主要旋转部件,这些部件的详细参数见表1。
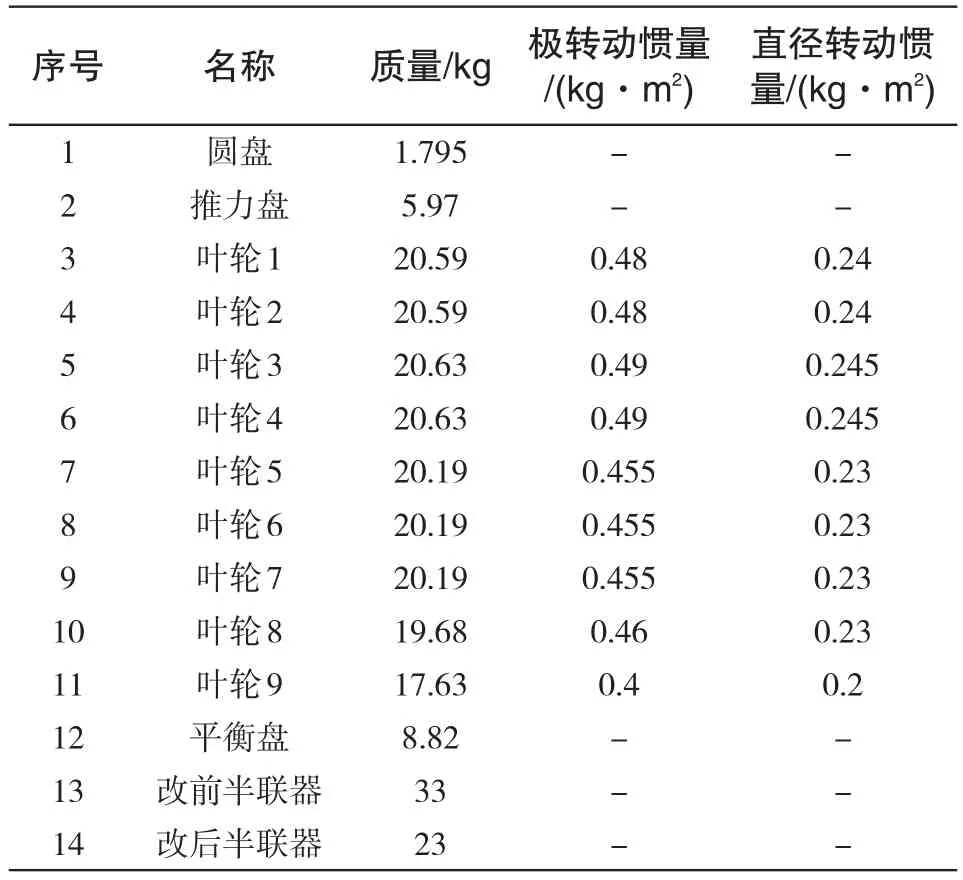
表1 转子上主要部件参数表Tab.1 Main components parameters of rotor
图1为机组开车时的振动趋势图,机组整个开车过程大约持续3分钟,当转速超过8 000r/min时,联轴器侧振动开始剧烈升高,非联轴器侧振动相对较小。当转速达到工作转速10 900r/min附近时,压缩机振动仍然呈现往上爬升现象,即使转速稳定一段时间,压缩机振动依然无法稳定,联轴器侧的振动最大达到117μm,非联轴器侧振动最大达到33μm,压缩机有振动过大联锁停车的迹象。

图1 压缩机开车时振动趋势图Fig.1 Vibration trend while compressor opearting
如图2所示,机组达到工作转速11 900r/min时,频率主要以200.3Hz工频为主,无其他频率成分,由于转速保持在11 900r/min附近时,振动依然缓慢爬升,故不平衡对机组振动影响的可能性较小,因为在判断转子不平衡对机组振动的影响时,最常用的办法是提升转速或者降低转速,以改变不平衡量产生的离心力对转子的作用,如果振动随转速的变化而变化,基本就能说明转子确实存在一定的不平衡因素[7-9]。


图2 压缩机振动联锁时频谱图Fig.2 Frequency spectrum diagram of compressor vibration interlock
如图3所示,振动在上升过程中,工频振动矢量相位角基本保持不变,即不平衡矢量的方向没有发生变化,这更能排除转子不平衡对机组振动的影响。转子在出现突发性不平衡时,如叶片断裂、叶轮松动和转子进入异物等情况,其工频振动矢量的相位角会产生剧烈波动,然后稳定在某个数值下。另外,转子在出现某种持续、渐变的不平衡时,如转子热弯曲,转子的工频振动矢量的相位角会随着热弯曲的加剧发生连续的变化。故通过分析本实例的振动频谱特征,即振动相位角为稳定和转速不变时振动幅值依然在缓慢爬升这两种情况,基本上可以排除了不平衡的原因[10-11]。

图3 振动上升过程中相位图Fig.3 Phase diagram during vibration ascent
2 联轴器改造前转子动力学分析
通过前面的分析基本上已经排除了一些常见的故障原因,为找到机组振动的真正原因,需对转子进行动力学分析,首先对联轴器改造前的转子进行模态分析和不平衡响应分析,然后再对联轴器改造后的转子进行同样的分析。
改造前联轴器结构如图4所示,重心位置距离压缩机转子轴头约为93.1mm,轴头长度为114mm,重心质量为33kg,联轴器重心位于转子外部。利用相关软件对转子进行了模态分析和不平衡响应分析,转子的建模特征如图5所示。

图4 改造前联轴器结构图Fig.4 Structural diagram of coupling before transformation

图5 改造前转子模型图Fig.5 Rotor model before transformation
各阶无阻尼振型如图6所示,在轴承支撑刚度为1.4e+008N/m的情况下,转子的一阶振型对应转速为4 056rpm,转子的二阶振型对应转速为7 797rpm,该转速对应的频率即为悬臂振型的固有频率。为验证转速7 797rpm对应的频率为悬臂振型的固有频率,下面进行在外激励影响下的转子不平衡响应分析[12-13]。

图6 联轴器改造前转子无阻尼振型图Fig.6 Undamped modal of rotor before coupling transformation
在外激励影响下,通过不平衡响应分析可得到图7所示的不平衡响应曲线,可以看到转子的临界转速约为8 000rpm,与无阻尼模态分析得到的悬臂振型的固有频率转速基本一致。由于转子悬臂振型下固有频率对应的转速为8 000rpm,与工作转速11 900rpm过于接近,隔离裕度无法满足API的相关要求。所以在压缩机转速从8 000rpm达到工作转速11 900rpm的过程中,振动会一直向上爬升,无法保持稳定,即机组发生了共振现象。
3 联轴器改造后转子动力学分析
改造后的联轴器结构图如图7所示,重心位置距转子轴头为-54mm,即改造后的联轴器重心已位于转子内部,且通过对联轴器的改造,将联轴器螺栓把合位置移至压缩机轴端内,并对套筒进行了适当减薄处理,把原联轴器质量33kg缩减到23kg。联轴器改造后转子的建模特征如图9所示。
改造后转子各阶无阻尼振型如图10所示,在轴承支撑刚度为1.4e+008N/m的情况下,一阶振型对应转速为4 069rpm,二阶振型对应转速为11 076rpm,三阶振型对应转速为15 236rpm,该转速对应的频率即为联轴器改造后悬臂振型的固有频率。
在外激励影响下,如图11所示的不平衡响应曲线可知,转子的临界转速约为16 530rpm,与无阻尼模态分析得到的悬臂振型的固有频率对应的转速基本一致。由于转子悬臂振型的固有频率对应的转速为16 530rpm与工作转速11 900rpm隔离裕度满足API的相关要求。所以机组再次开车时,压缩机在达到工作转速时振动能够保持稳定,振动幅值大小满足API要求,说明通过联轴器重心位置内移和质量减轻的方法可以减轻悬臂振型的影响。
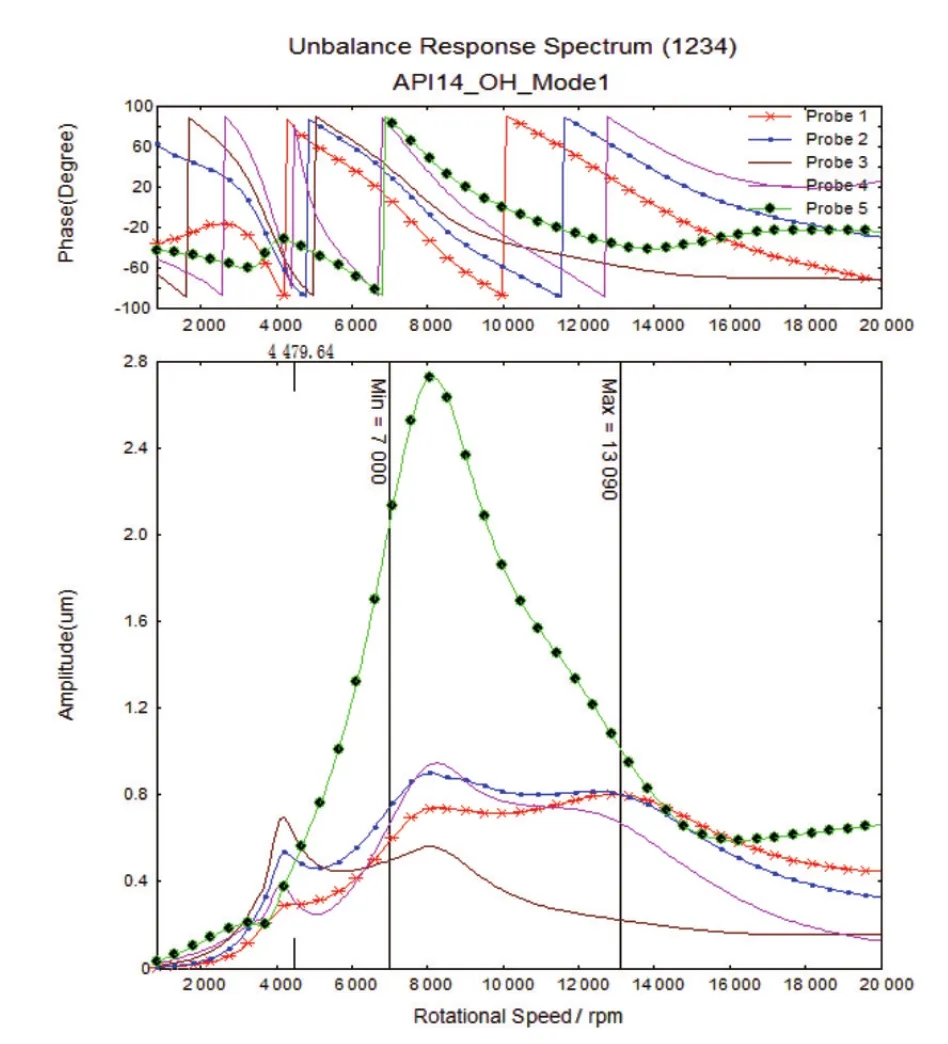
图7 联轴器改造前不平衡响应曲线Fig.7 Unbalanced response curve before coupling transformation

图8 修改后联轴器结构图Fig.8 Structural drawing of coupling after transformation

图9 改造后转子模型图Fig.9 Rotor model after transformation
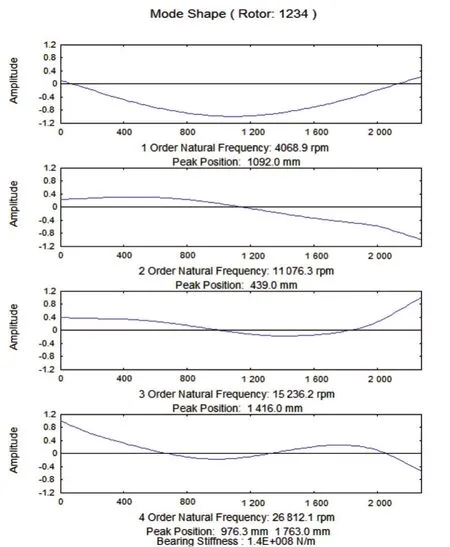
图10 联轴器改造后转子无阻尼振型图Fig.10 Undamped vibration diagram of rotor after coupling transformation

图11 联轴器改造后不平衡响应曲线Fig.11 Unbalanced response curve after coupling transformation
4 结语
通过实例分析可以得出以下结论:
1)当联轴器重心距离临近的压缩机支撑轴承过远且质量较重时,激发出转子悬臂振型所需要的转速往往会较低,当该转速与工作转速非常接近时,就会很容易引发转子系统共振,且振动无法保持稳定,呈现持续上升的特点。减少联轴器重心质量和缩短联轴器重心与临近的压缩机支撑轴承的距离,可以增加悬臂振型的固有频率,避免了与机组工作转速过于接近而产生的共振现象,即工作转速与临界转速的隔离裕度不够。
2)这种振动现象从频谱上看,主要表现为工频振动大,工频振动矢量的相位角基本保持稳定,振动不会随着转速的变化而变化,即使转速不变,振动也会增大。
所以在压缩机组基础装置设计时,应该尽量缩短轴头间距,减轻联轴器的质量,避免轴系的悬臂振型在较低的转速被激发出来,使机组在工作转速时发生共振,影响机组正常生产运行。
