一种新的加速器EPID机械精度的高精准测量方法及其实现
2020-01-18郑立夫许侨洋方川葛云黄晓林陈颖
郑立夫,许侨洋,方川,葛云,黄晓林,陈颖
1. 北京市医疗器械检验所 机电二室,北京 101111;2. 南京大学 电子科学与工程学院,江苏 南京 210023
引言
电子射野影像装置(Electronic Portal Imaging Device,EPID)是一种放射治疗辅助装置,于20世纪50年代开始应用于临床,最初的设计目的是检验和校正摆位误差[1]。随着相关软硬件的不断开发和进步,EPID的使用不断普及,应用范围也不断扩大,目前已成为放射治疗质量保证的重要环节[2-4]。
EPID置通常由射线探测器和射野影像处理系统两部分构成。使用EPID进行放射治疗时,辐射束照射靶区,在出射方向采用电子技术获取影像。根据探测方式可分为荧光探测器、液体电离室探测器和固体探测器三种类型[5-7]。其中,固体探测器系统体积小,分辨率高,运动范围大,效率高,图像质量优异,是目前EPID开发的热点,已成为主流的EPID成像技术[8]。美国Varian公司的PortalVision系统、英国Elekta公司的iViewGT系统、德国Siemens公司的PotiVue系统都属于非晶硅EPID固体探测器。
EPID最初的设计目的是在放射治疗过程中验证和校准患者的摆位误差,但随着其应用的普及,医生和学者越来越关注其剂量学特性,如用EPID测量靶区、非均匀组织和敏感器官的剂量及照射范围的变化等[9],或者从出射影像中获取剂量分布的信息,用以自动设计补偿器[10-12]。
EPID影像质量受到多种因素影响,比如加速器源大小、源到探测器距离、探测器和放大器的灵敏度、加速器脉冲信号、探测器水平程度等等[8,13]。EPID机械位置在安装时虽已达到临床使用要求,但随着日常使用、设备故障维修、机械器件老化,EPID机械精度可能会有所下降,其标定误差影响着放疗摆位、加速器质量控制和剂量验证的结果。为保证EPID正常发挥功能,临床上需要进行相应的质量保证与控制措施[14-16]。本文提出了一种新的EPID机械精度精确检测方法。
1 材料与方法
检测系统由硬件和软件两部分组成,硬件包括定位小球、注册笔、水平仪和红外双目相机,软件部分包括机械等中心获取、EPID影像等中心测量和平板打开角度测量。
1.1 硬件部分
1.1.1 红外双目相机
本系统使用加拿大Northern Digital Incorporated(NDI)公司生产的Ploaris系列光学测量相机(图1)。相机内部发射850 nm红外光,根据反射物形成的亮斑,利用空间三角关系计算空间坐标,从而实现跟踪定位。

图1 红外双目相机
1.1.2 定位小球
测量过程中需要在被测物体上进行标记,为了解决自然光易被外界环境干扰的问题,系统使用球形标记物作为特征点,标记物如图2所示,称为定位小球。定位小球直径为3.5 cm,表面由大量微小的“全反射镜”构成,全反射镜表面镀有一层特殊物质,对光线的反射效果更好。在红外光源的照射下,这些“全反射镜颗粒”可以提高光线的反射率,最终大幅提高成像质量,提高定位精度。小球下方的黑色底座可以将小球固定在加速器机架、治疗床和EPID平板上。在本系统中,定位小球用于记录加速器机架和治疗床的运动轨迹。经大量实验证明,使用NDI红外双目相机读取小球球心坐标时,误差在1 mm以内。
1.1.3 注册笔
注册笔如图3所示,由3个小球、黑色支架和金属笔尖组成。三个小球的球心与笔尖位于一条直线上,小球与笔尖之间的相对位置关系由支架固定,通过小球的三维坐标可以精确计算注册笔笔尖的空间位置。在本系统中我们用它来测量EPID平板位置,测量的同时注册笔与EPID平板之间几乎不产生相互作用力,能有效防止EPID平板因受力产生的形变和角度变化。
图2 定位小球

图3 注册笔
1.1.4 水平注册仪
水平注册仪如图4所示,用于确定加速器系统的水平面。水平注册仪上固定有3个定位小球,利用“不共线的三点可以确定一个平面”的原理,确定加速器系统的水平面,从而计算相机坐标系到加速器坐标系的齐次变换矩阵。
水平注册仪上的三个小球都位于水平仪外侧圆的圆周上,顺次连接形成直角三角形,如图5所示,此三角形的斜边与水平仪的横轴刻度线在一条直线上,该直线作为x轴,另一个小球到此直线的垂线作为z轴,两轴交点即为原点,过原点垂直于水平仪的直线作为y轴,由此可以建立加速器坐标系。三个小球在加速器坐标系下的坐标分别为PA=(-a,0,0),PB=(b,0,0),PC=(0,0,-c)。

图4 水平注册仪

图5 加速器坐标系
红外双目相机根据自身位置建立相机坐标系,相机坐标系下三个小球的坐标分别为RA、RB、RC。相机坐标系和加速器坐标系之间的转换可以拆分为一个旋转操作和一个平移操作。

其中,Px、Py、Pz表示加速器坐标系下小球坐标,Rx、Ry、Rz表示相机坐标系下小球坐标,T表示旋转矩阵,Cx、Cy、Cz表示加速器坐标系原点在相机坐标系下的坐标。
需要注意的是,完成水平仪注册后,变换矩阵由注册时相机位置和水平仪位置唯一确定,后续测量操作过程中不得移动相机。
1.2 获取机械等中心坐标
将定位小球固定于加速器机架(A)和治疗床(B)上,将机架、治疗床分别旋转至任意角度,利用红外双目相机实时获取小球坐标。其中机架旋转N次,治疗床旋转M次,每次旋转角度不同,得到的两组小球坐标分别记为:

其中,A、B分别表示随机架、治疗床旋转而变化的特征点三维坐标集合,i表示机架的第i次旋转,j表示治疗床的第j次旋转。理论上,不共线的三个点即可确定一个圆,但考虑到仅用三个点拟合圆则测量过程中的误差可能会对拟合结果有较大影响,本文对机架和治疗床进行多次旋转,并根据多个测量点拟合小球运动轨迹圆。
对于机架来说,根据“集合中空间点到旋转轴的距离之差最小”原则,求解公式为式(4):

使得f取值最小的(xc,yc,zc)和R分别为机架上小球运动轨迹拟合圆的圆心和半径。从拟合得到的圆周上任意选三个点hA1、hA2和hA3,令hA1分别与hA2和hA3做向量,得到向量和,根据公式(5):


同理可计算得到治疗床旋转轴lB。
理论上lA、lB两轴的交点即为加速器等中心。但在实际测量中,由于机械磨损、计算误差等原因,两轴不一定交于一点,需要计算两条轴线间公垂线的两垂足(图6),分别记为DA=(xA,yA,zA)和DB=(xB,yB,zB),则加速器机械等中心坐标估计为式(7):

参数λ是比例系数,取值由操作者定义,默认取值为0.5,即两垂足的中点。
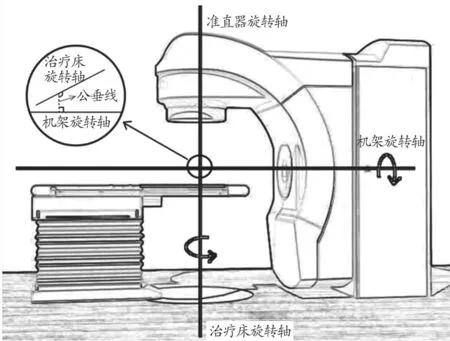
图6 机械等中心
1.3 EPID影像等中心测量
EPID影像等中心测量过程分为以下四个步骤:① 将定位小球固定于治疗床上,调整治疗床位置,使小球中心位于1.2中计算出来的机械等中心位置;② 将加速器机架调整至0°,打开EPID平板,关闭治疗室隔离门,调取方型野,设置影像大小为20 cm×20 cm,方型野内小球影像与小球实际大小比例为1:1,采集EPID影像P1(图7);③ 将加速器机架旋转90°,再次采集EPID影像P2;④ 分别根据图像P1和P2中小球圆周轮廓计算EPID影像上机械等中心位置。取圆周轮廓上任意三点,设三个点坐标分别为(x1,y1)、(x2,y2)和(x3,y3),则可得到式(8),根据合并三个公式即可计算出圆心位置(x0,y0)。对图像P1执行上述计算,得到圆心(xp1,yp1),对图像P2执行上述计算,得到圆心(xp2,yp2),则EPID影像上机械等中心坐标为(xp1,yp2,y1);⑤EPID影像的正中心为影像等中心,根据影像P1测量机械等中心与影像等中心水平方向距离(dx,dz),根据影像P2测量垂直方向距离dy,从而可以计算出影像等中心与机械等中心之间的距离d如式(9)。

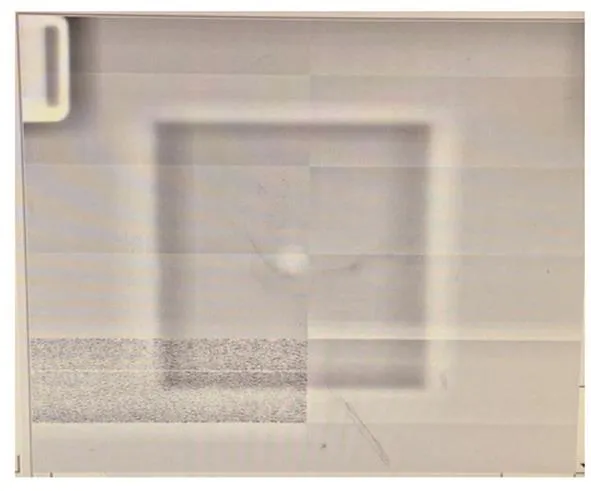
图7 EPID影像
1.4 EPID平板角度测量
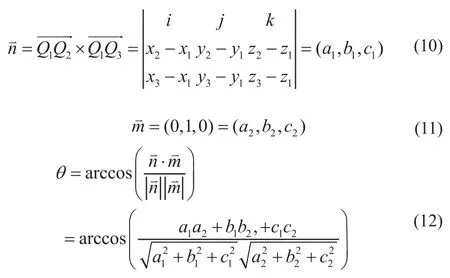
EPID平板角度测量分为以下三个步骤:① 利用注册笔测量EPID平板上任意三个点的坐标,分别记为Q1、Q2和Q3;② 根据三点确定平面原理 ,计算得到平板法向量;③ 由加速器坐标系下竖直方向法向量,计算得到两向量的夹角。各参数计算公式,见式(10)(11)和(12)。
2 试验结果
本系统在三所医院的放疗科进行了测试试验,对每台EPID重复3次试验,每次试验记录机械等中心坐标、影像等中心偏差、EPID平板角度等数据。
A医院三次试验结果如表1所示。检测结果显示该机器机械等中心与影像等中心偏差在1.3 mm以内,三次测量平均偏差为1.103 mm,标准差为0.103 mm;平板倾斜角度在1.1°以内,三次测量平均倾斜角度为0.907°,标准差为0.103°。
B医院三次试验结果如表2所示。检测结果显示该机器机械等中心与影像等中心偏差在1.1 mm以内,三次测量平均偏差为0.94 mm,标准差为0.080 mm;平板倾斜角度在1°以内,三次测量平均倾斜角度为0.813°,标准差为0.116°。C医院三次试验结果如表3所示。检测结果显示该机器机械等中心与影像等中心偏差在1 mm以内,三次测量平均偏差为0.847 mm,标准差为0.130 mm;平板倾斜角度在1°
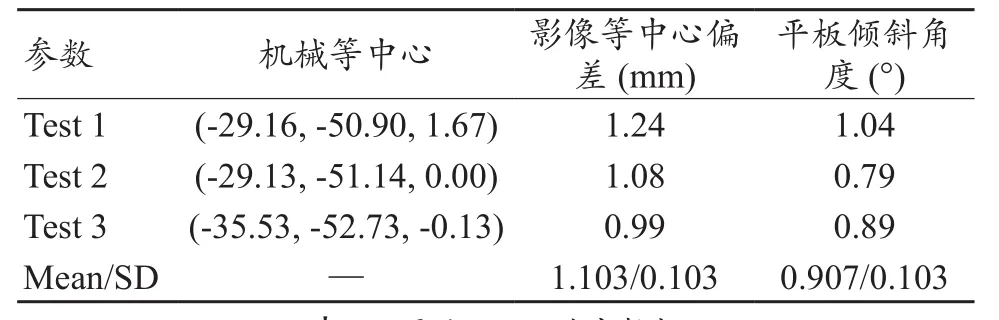
表1 A医院EPID测试数据
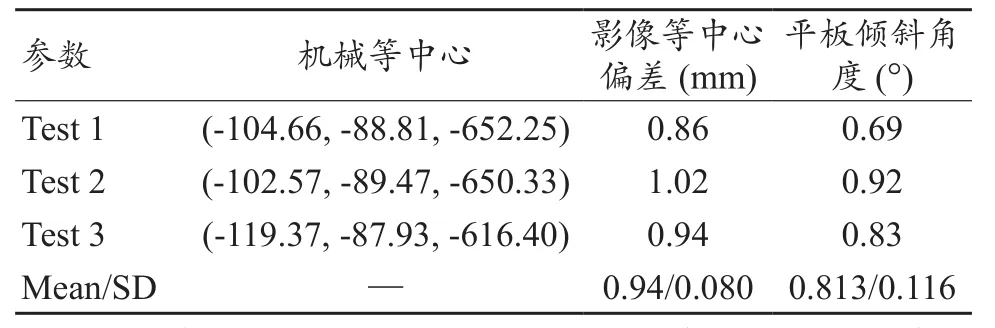
表2 B医院EPID测试数据
以内,三次测量平均倾斜角度为0.783°,标准差为0.133°。
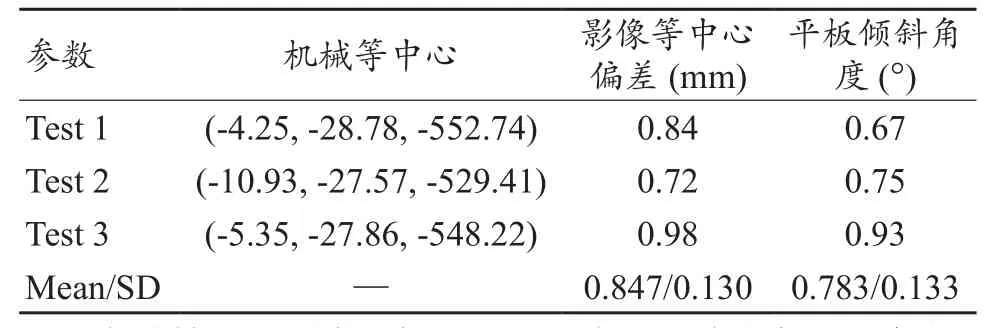
表3 C医院EPID测试数据
实验结果证明本文提出的测量方法具有良好的重复性,可以用于临床仪器检测。
3 讨论
本文对服役于三家医院的三台EPID分别重复进行三次机械精度检测,每台EPID三次检测结果基本一致,通过三次检测得到的影像等中心位置误差浮动在1 mm以内,平板打开角度误差浮动在2°以内,试验结果表明该方法具有良好的重复性,能够精确计算EPID的机械精度误差。
本文提出的EPID机械精度检测方法具有操作方便快捷,原理及计算过程简单明确等优点,易于医护人员及机械师理解和操作。同时,多组实验证明本文所述方法计算结果精确,数据重复性好,能够满足临床使用要求。但该方法在测量影像等中心偏差时,使用手工测量方法,该方法可能引入人工误差,今后的研究中,将考虑使用计算机算法根据EPID影像自动提取影像等中心偏差,从而进一步控制误差范围。
EPID结构复杂,从安装、调试、验收到应用、维修、质检过程都需要严格的质量保证和控制措施,在熟悉设备原理和操作方法的基础上,定期进行质量保证和质量控制可以保证EPID功能的正常发挥,本文提出的EPID机械精度检测方法操作简单、结果精准,具有良好的重复性,极大地方便了EPID的日常质量保证和控制工作,将复杂的质控过程数字化、自动化,对相关技术人员以及医务人员提供指导。
