多重极坐标分层差分在瀑布沟水电站变形监测中的应用
2020-01-16江德军黄会宝熊小虎
江德军,黄会宝,柯 虎,熊小虎
(国电大渡河流域水电开发有限公司,四川 成都 610000)
0 引 言
在水电站运行期,为了保证大坝及边坡的安全,需要对其进行高频率、高精度的变形监测。由于水电站的特殊条件,传统的人工测量耗时长、精度低,不但不能及时、快速、准确地反映构筑物结构变形情况,而且人员投入大、作业风险高,因此水电站自动变形监测具有重要的现实意义。
在实际的自动变形监测中,观测的日期和时间跨度大,采用测量机器人自动测量时,必然会受到气象代表性误差、大气折光及其他未知的非线性误差影响。上述诸多因素又是随时间、地点和外部气象条件而随时变化,在有一定精度要求的变形监测中不考虑上述因素的影响,则会给最终的监测结果带来明显的偏差。而要准确地、因时因地测量上述各参数难度较大,有时要建立这样一个系统误差元素实时获取的信息系统甚至是不可能的。因此,要建立一个实用而尽可能简单的自动变形监测系统,必须解决用简单易行的手段实时解决原始观测值系统误差改正的问题。
本文依托大渡河流域瀑布沟水电站变形监测实际,提出多重极坐标分层差分监测方案,分别对斜距、球气差系数、水平方位角进行了差分改正,解决了系统误差高效改正问题。该测量方案在瀑布沟水电站成功应用,系统自建成至今运行状况良好,监测数据完整可靠,为大坝安全提供了良好的保障。
1 多重极坐标分层差分基本原理
在变形监测区域布设监测基准网点时,选取建造一些稳定的,可以覆盖监测区域且与工作基点性质相同的校准基点,将校准基点与测站工作基点之间所形成的边角关系当作自动变形监测改正或消除系统误差的已知条件。实际观测时,在工作基点上对变形点进行观测的同时按方向、按顺序对校准基点进行观测。此时,校准基点的观测值和原有已知值之间就会存在不符值,这些不符值可认为是气象等诸多因素在某时综合影响所造成的。由于采用测量机器人进行自动观测所需时间短,可近似认为变形监测点和校准基点是在同一时刻获得的观测值,这些对校准基点产生的综合影响也会用同样的方式、不同的量值对其他变形监测点产生相似的影响。因此,可以把已知边、已知点所求得的改正数或用边长,或用方向值,或用时间差为引数,按数学模型来配赋到未知的变形监测点上,以求消除气象等不确定性因素带来的测量误差。
同时,为提高监测点与校准基点的共性,提出利用分层(分组)的方法,缩小差分范围,拉大不同分组测点的差异,提高同一组内测点的共性,进一步提高差分改正精度。具体实施时可按照变形监测测点所处的高程、平面位置选择相近高程及平面位置的测点为一个点组。同时,选择与该点组高程相近、平面位置接近的校准基点进行改正,最终使所有变形测点均处于测站至该点组校准基点所形成的锥形体范围内。另一方面,为减小单一后视点带来的偶然误差,可选择多个后视点,形成多重极坐标,实际测量时取各后视点观测归零方向的均值,以提高观测的精度。
(1)
(2)
式中,Δd为距离气象改正比例系数,为了保证Δd的可靠性和准确性,实践中取多个基准点测定的Δd的中数,用于相似区域变形点距离测量的差分气象改正。

(3)
(4)

hJ=dJ·sinα+仪高J-镜高J
(5)
式中,dj为监测站与某基准点间斜距;α为竖直角。
球气差改正系数
(6)
在每周期变形点的监测过程中,由于测量时间较短,可以认为c值对基准点及与基准点相近区域的变形点具有相同的影响,根据式(7)可求出变形点与监测站之间经球气差改正的三角高差
ΔhP=dP·sinα+c·(dP)2·cos2α+仪高P-镜高P
(7)
式中,dP、ΔhP分别为监测站与各变形点间的斜距和高差,求得dP和ΔhP后,根据式(8)可求出监测站至变形点间的平距
(8)
式中,Dp为监测站至变形点间的平距。综合以上各项差分改正,则可按极坐标计算公式可准确求得每周期各变形点的三维坐标。
2 应用实例
2.1 工程概况
瀑布沟水电站位于四川省汉源与甘洛两县交界处的大渡河中游,大坝坝型为砾石土心墙堆石坝,最大坝高186 m,水电站正常蓄水位850.00 m,汛期运行限制水位841.00 m,死水为790.00 m,总库容53.37亿m3,为不完全年调节水库。瀑布沟大坝及边坡外部变形监测系统包含原设计的地表变形监测控制网、大坝水平位移及垂直位移监测系统、近坝边坡表面变形监测系统等。
瀑布沟水电站外部变形监测自动化系统于2013年10月开工建设系统一期,2014年7月投入试运行,实现了大坝坝后、溢洪道闸室及坝后左右岸边坡的全部外部变形测点自动监测。2015年底建成系统二期,实现了大坝坝前、拉裂体、古拉裂体及开关站边坡的外部变形测点自动监测。该系统投入运营以来,充分发挥了设计功能,对既定监测目标实施自动化观测、数据全自动处理,采集了大量针对监测目标的数据信息,为瀑布沟水电站安全运营提供了有力的技术支撑和科学保障。

表1 坝后坝体表面监测点精度指标统计
2.2 监测方案
瀑布沟大坝外部变形监测自动化系统采用以全站仪多重极坐标分层差分为主,GNSS卫星定位测量法为辅的水电站大坝及边坡外部变形远程自动监测方案。在大坝坝后右岸边坡及坝前放空洞竖井稳定基岩处各设置一个观测站(命名为TB02测站和TB09测站),其中,TB02测站监控大坝坝后、溢洪道闸室及坝后左右岸边坡测点,TB09测站监控大坝坝前、拉裂体、古拉裂体及开关站边坡测点。考虑到瀑布沟大坝变形测点分布范围广、高差大,将各监测测点按照高程及平面位置分层分组观测。大坝坝后TB02测站监控测点分为2层,第一层差分改正点为TB07、TB08、TP56,监测坝顶下游侧、坝后806 m高程,溢洪道及溢洪道边坡,挑流鼻坎、老柯玛等部位共28个测点;第二层差分改正点为TB01、TB03、TP56,监测坝后756 m高程和731 m高程上游侧及下游侧部位共15个测点。放空洞竖井TB09测站监控测点分为4层,其中,第一层差分改正点为TB10、TB05、TB11,监测坝顶上游侧10个测点;第二层差分改正点为TN07、TB12、TB15、TB16,监测拉裂变形体下部6个测点;第三层差分改正点为TB12、TB15、TB16,监控拉裂体中部6个测点;第四层差分改正点为TB12、TB15、TB16,监控拉裂体上部6个测点。
同时在大坝河床部位典型断面(0+240)设置GNSS监测点与棱镜测点同轴布置,实现对大坝三维位移进行全天候实时可靠监测。
2.3 监测精度分析
2.3.1测量机器人监测成果分析
瀑布沟水电站测量机器人自动化监测系统监测点布设较多,不同位置不同时间的监测点观测中误差各异,限于篇幅,本文以系统运行初期至2017年底为评价时间范围,以坝后变形测点为评价对象,以评价时间范围内监测点变形成果数据为基础,计算其中误差,计算求得的坝后坝体表面监测点精度参数如表1所示。
由表1可见,坝后监测系统观测成果的平面监测点位中误差较小,所有监测点点位中误差均符合《工程测量规范》中二等变形监测精度要求;三角高程中误差全部满足《工程测量规范》中三等变形监测要求。同时,根据表1监测精度指标大小关系可以大致看出,位于低高程面上的监测点的观测精度普遍高于位于高高程面上的监测点观测精度。
坝后监测点高程及点位中误差拟合曲面见图1。从图1可以看出,监测点高程中误差与监测点点位关系密切,高程较大的监测点高程中误差要大于高程较小监测点高程中误差,且距离测站越近的监测点,观测成果的高程中误差越小,精度越高;监测点点位中误差与监测点点位没有明显的联系,除了坝顶个别监测点的点位中误差稍大(但未超过二等精度指标要求),所有监测点的观测点位中误差都较小,精度较好。

图1 坝后成果监测点高程及点位中误差拟合曲面
2.3.2坝后GNSS+棱镜共点监测点成果分析
瀑布沟水电站坝后坝体表面共有GNSS+棱镜同轴监测点5个,分别为TP04、TP13、TP21、TP27、TP32,全部分布于大坝0+240断面上(大坝最大断面),选取TP13及TP21绘制测量机器人与GNSS监测位移过程线见图2、图3所示。
从图2、3可以看出,0+240横断面上GNSS测点与棱镜监测点位移规律一致,趋势相同,竖直方向发生沉降,坝轴线方向较为稳定,轻微向左岸方向位移,上下游方向向下游位移,且存在一定的波动。同时,结合环境资料中库水位数据可以看出,监测点的上下游方向变形与库水位的变化具有较大关联。对比GNSS与全站仪数据,各监测点GNSS监测成果与全站仪监测成果所显示的变形趋势相同,均反映了监测点相同的变形趋势。
2.3.3坝后人工水准与自动化成果对比分析
瀑布沟坝后各水平位移观测墩同点布置有水准点,同时进行测量机器人自动化监测与人工水准监测,对测量机器人自动化监测、GNSS与人工水准周期监测成果数据时间序列进行分析,如图4所示。

图2 GNSS天线棱镜共点监测点TP13位移过程线
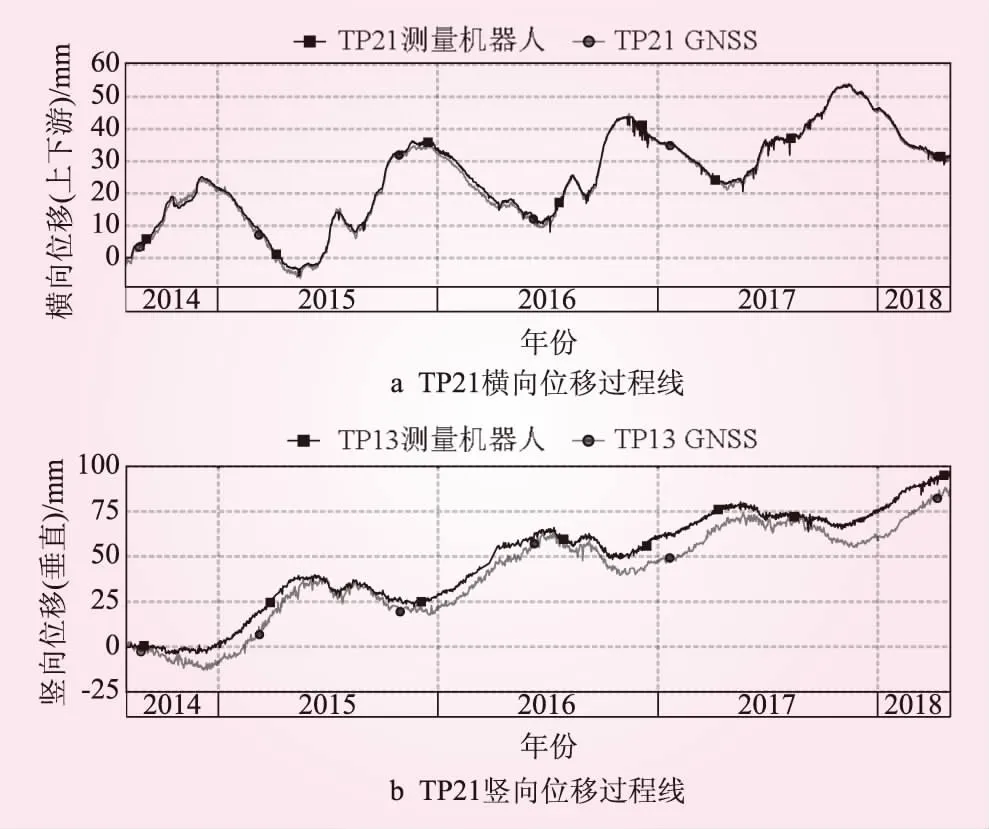
图3 GNSS天线棱镜共点监测点TP21位移过程线

图4 坝后TP13、TP21人工水准、自动化及GNSS竖向位移过程线
从图4可见,坝后监测点在竖直方向上的人工监测成果与自动监测成果(测量机器人及GNSS)所反映的监测点高程变形量大小、变形趋势相同,具有很好的一致性;自动化监测成果在竖直方向上的监测成果存在极少部分的奇异值,但对监测点的变形情况分析影响甚小;测量机器人监测自动化系统成果与人工监测成果一致性良好,自动化监测系统具有高效便捷的特点、避免了人工监测的诸多条件限制,可满足工程需求。若以人工水准监测成果为精确值,坝后各测点测量机器人高程监测成果的精确性与监测点距测站的斜距有较为明显的关系,当斜距值增大时,各测点测量机器人所测高程监测成果较人工水准监测成果的精确性有所降低。
3 结论与建议
本文针对极坐标测量中存在的系统误差,提出了多重极坐标分层差分的测量方案,分别对斜距、球气差系数、水平方位角进行了差分改正,解决了系统误差高效改正问题。该测量方案在瀑布沟水电站成功应用,系统自建成至今运行状况良好,监测数据完整可靠,为大坝安全提供了良好的保障。自动化系统总体精度较高,监测成果可靠,满足相关规范精度指标要求,可用于坝区变形监测工作。
