传感器在无人驾驶汽车中的应用研究
2020-01-15
(1.湖南汽车工程职业学院,湖南 株洲 412000;2.北京理工大学,北京100081)
随着工业的发展,传感器在工业领域的用途越来越广泛,如汽车、机械、自动化、交通信息等,尤其是近几年无人驾驶汽车发展迅速,传感器技术的进步对无人驾驶汽车的发展起到了重要的推动作用。近几年,各国对传感器技术的研究主要集中在以下几个方面:① 新材料、新工艺和新型传感器;②智能化、多功能、集成化和高精度;③ 硬件和器件的微型化及与其他传感器的相融合化[1]。
1 无人驾驶汽车中的传感器技术
传感器在无人驾驶汽车中相当于人类的神经感知系统,传感器、导航系统、GPS定位系统是无人驾驶汽车的三个重要组成部分。现在无人驾驶汽车中应用最多的传感器技术主要是雷达传感器、摄像头等[2],如通过测距获取周围空间信息的激光雷达、毫米波雷达,用于视觉传输的相机等。
1.1 视觉传感器
无人驾驶汽车中视觉传感器主要用来获取环境信息和彩色景象信息,是无人驾驶汽车第二大信息源。目前无人驾驶汽车视觉传感器主要为相机和摄像头,其中最常用的是相机。根据其功能分为单目相机、双目立体相机和全景相机。
1.1.1 单目相机
无人驾驶汽车中的相机等同于驾驶员的眼睛,通过环境成像来感知道路环境、天气情况、车辆行驶轨迹和车辆运行速度。无人驾驶汽车对图像成像质量要求高,而且在图像输出速度上需要较高的帧频。
单目相机是一种利用光学系统与成像器件相结合可以不断输出实时图像的相机。满足无人驾驶汽车的要求,可实时调节光积分时间、自动平衡画质、实时输出图像功能。
1.1.2 双目相机
双目相机对周围环境可实现三维成像,通过双目立体图像处理获取场景的三维信息,再经进一步处理得到三维空间中的景物,实现二维图像到三维图像的转化[3]。
1.1.3 全景相机
全景相机由6个完全相同的相机360°同时成像,并将6幅图进行拼接和矫正,获得全景图像,并对目标进行识别和信息处理,目前该相机已作为无人驾驶汽车视觉传感器的首选。
1.2 激光雷达
在众多无人驾驶汽车中,激光雷达作为环境传感器应用最为广泛,其具有良好的方向性,测量精度高,受地面干扰较小,但在阴雨、大雾天气无法正常工作。激光雷达通过向探测目标发射光线,分析和计算反射光来完成测距。激光雷达根据结构和类型可分为单线(二维)和多线(三维)两种,其中多线激光雷达具有一定的俯仰角度,可实现面扫描。
1.2.1 单线激光雷达
单线激光雷达最具代表性的是德国SICK公司的LMS511单线激光雷达,其参数指标见表1。单线激光雷达的工作原理是通过发射激光束扫描某一区域,并根据区域内各点与扫描仪的相对位置,即测量物体与扫描仪扫描中心之间的距离和相对角度,采用极坐标表达其测量值。为了提高数据返回速度单线激光雷达一般使用网络接口传输方式,由上位机向雷达发送请求,雷达根据请求中的测量要求收集数据并返回给上位机。
x=ρcosθ
y=ρsinθ
(1)
式中:ρ为距离;θ为相对角度。
表1SICK LMS511参数指标

扫描频率/Hz每帧扫描点数扫描距离/m扫描角度/°分析率/°分辨率/m2576126~80-5~1900.251
1.2.2 多线激光雷达
多线激光雷达最具代表性的是美国Velodyne公司的HDL-64E S2激光雷达,多线激光雷达的工作原理是发射2条或2条以上的激光束作为探测光的雷达。多线激光雷达可发出64个激光束,其全部安装在旋转电机上,水平和垂直探测范围为360°和26.8°。多线激光雷达通过串口接收控制命令,并通过UDP协议网络返回数据于上位机。64线激光雷达有64对光束,发射器与接收器分为上下两层,传输数据也分为两部分。根据激光器安装位置对收集到的数据建立几何模型。
D=Dcorr+Dret
Dxy=Dcosθ-V0sinθ
Px=Dxysinβ-H0cosβ
Py=Dxycosβ+H0sinβ
Pz=Dsinθ+V0cosθ
(2)
式中:Dcorr为距离校正因子;V0为垂直偏移量;H0为水平偏移量;θ为垂直校正角;α为旋转校正角。(Px,Py,Pz)为激光雷达的笛卡尔坐标,其由每一条激光束返回的距离Dret值和激光雷达的旋转角度γ转化而来。主要多线激光雷达的参数及性能见表2。
表2主要多线激光雷达参数指标
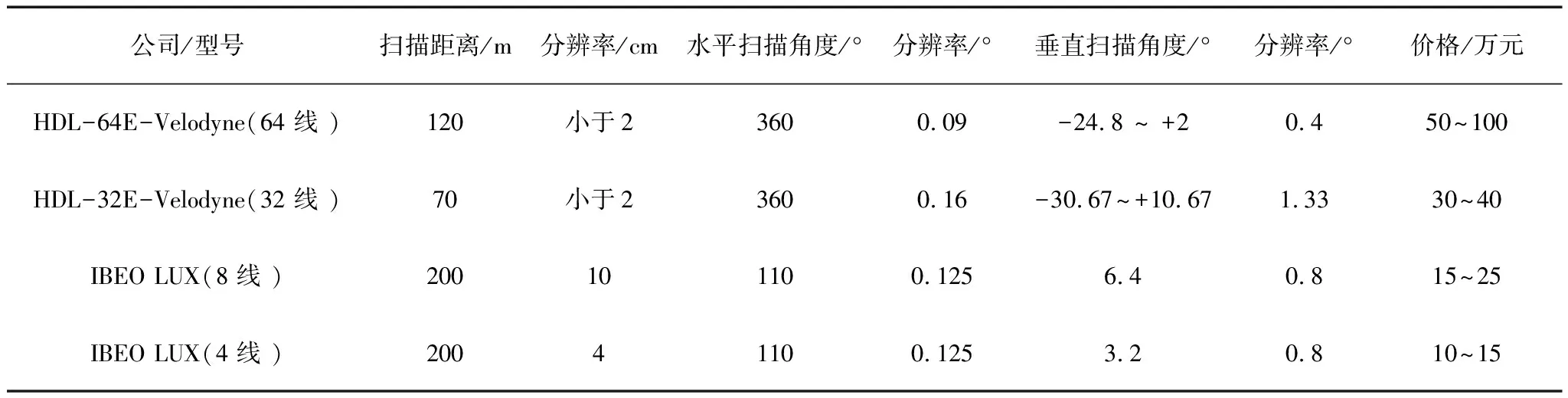
公司/型号扫描距离/m分辨率/cm水平扫描角度/°分辨率/°垂直扫描角度/°分辨率/°价格/万元HDL-64E-Velodyne(64 线 )120小于23600.09-24.8 ~ +2 0.4 50~100HDL-32E-Velodyne(32 线 )70 小于2 360 0.16 -30.67~+10.671.3330~40IBEO LUX(8 线 )200 10 110 0.125 6.4 0.8 15~25IBEO LUX(4 线 )200 4 110 0.125 3.2 0.8 10~15
激光雷达具有良好的抗干扰能力,测距精度高,实时性好,在道路检测、导航定位及机器人领域应用广泛。
1.3 毫米波雷达
毫米波是指波长为1~10 mm、频域为30 ~300 GHz的波,这种波形的波长介于光波和厘米波之间,因此兼有微波制导和光电制导的优点。与厘米波导引头相比,毫米波导引头具有空间分辨率高、体积小、质量轻的特点。与红外、激光等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强(大雨、雾、雪天除外),具有全天候全天时的特点。毫米波雷达参数见表3[4]。
表3毫米波雷达参数

公司/型号远距离探测/m分辨率/m视角/°分辨率/°中距离探测/m分辨率/m视角/°分辨率/°Continental ARS3082002561600.25170.1Delphi ESR1742.5+/-100.5600.4+/-450.2
2 传感器融合技术
在无人驾驶汽车中传感器相当于人的眼睛和感知神经,各个神经需要相互匹配和融合才能实现真正意义上的无人驾驶,传感器之间需要相互融合和关联才能发挥作用。
传感器融合是利用计算机技术将多个传感器进行综合处理[5-6],融合后每个传感器之间的数据可相互融通获得更加确切的数据,利用联合概率数据关联等算法来处理这些数据,可达到统计学上的最佳效果。融合传感器获取的多目标运动轨迹信息可以准确测量出被测物体目标的位移、角度和速度。例如,毫米波雷达的分辨率低于激光雷达,采用融合技术可用激光雷达获得的信息数据替换和更新毫米波雷达所获取的数据;另外通过传感器融合技术可提高毫米波雷达和激光雷达的目标分辨率,提高被测物体测量的精确度。 传感器技术融合的方法有以下几种:
(1)直接融合传感器数据,如图1所示。
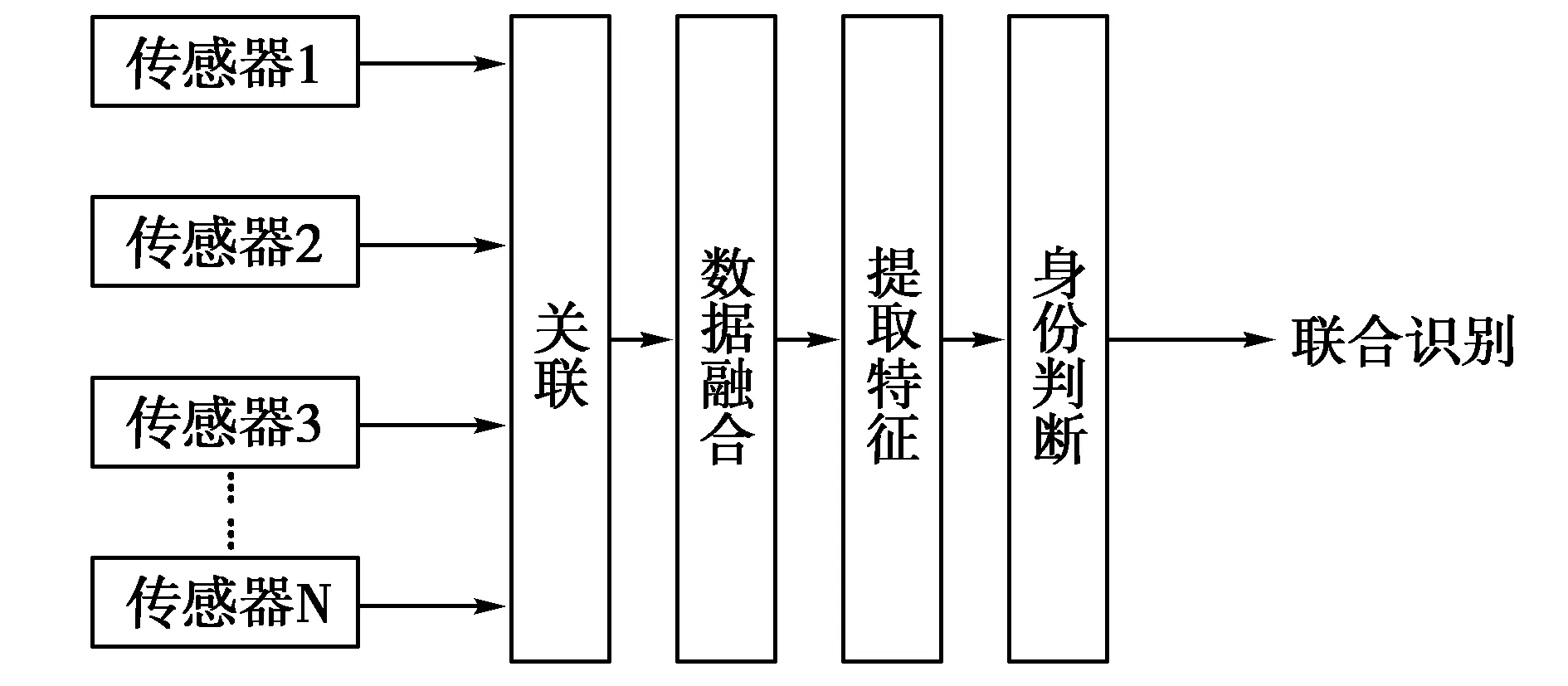
图1 直接融合
(2) 特征向量融合,如图2所示。
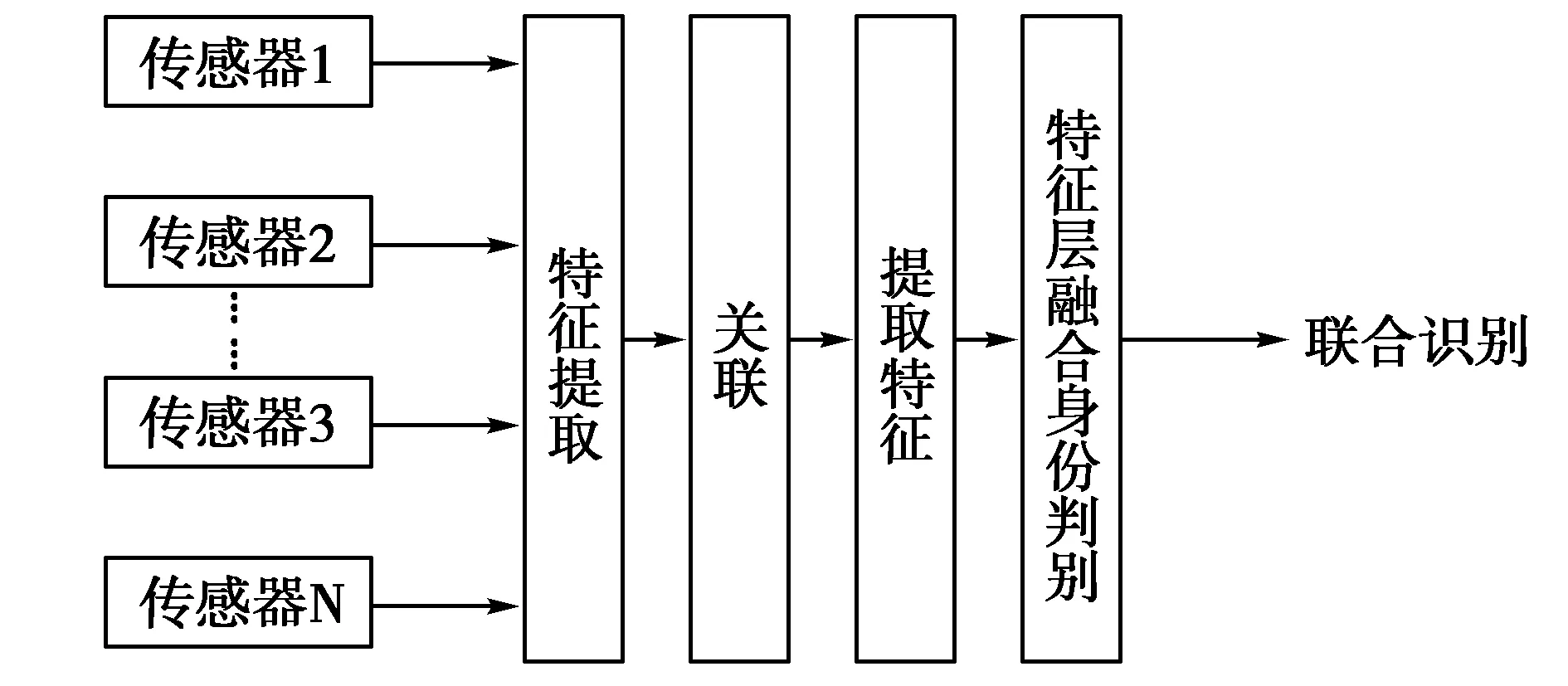
图2 特征向量融合
(3) 高层决策融合,对每个传感器传来的数据进行处理,如图3所示。
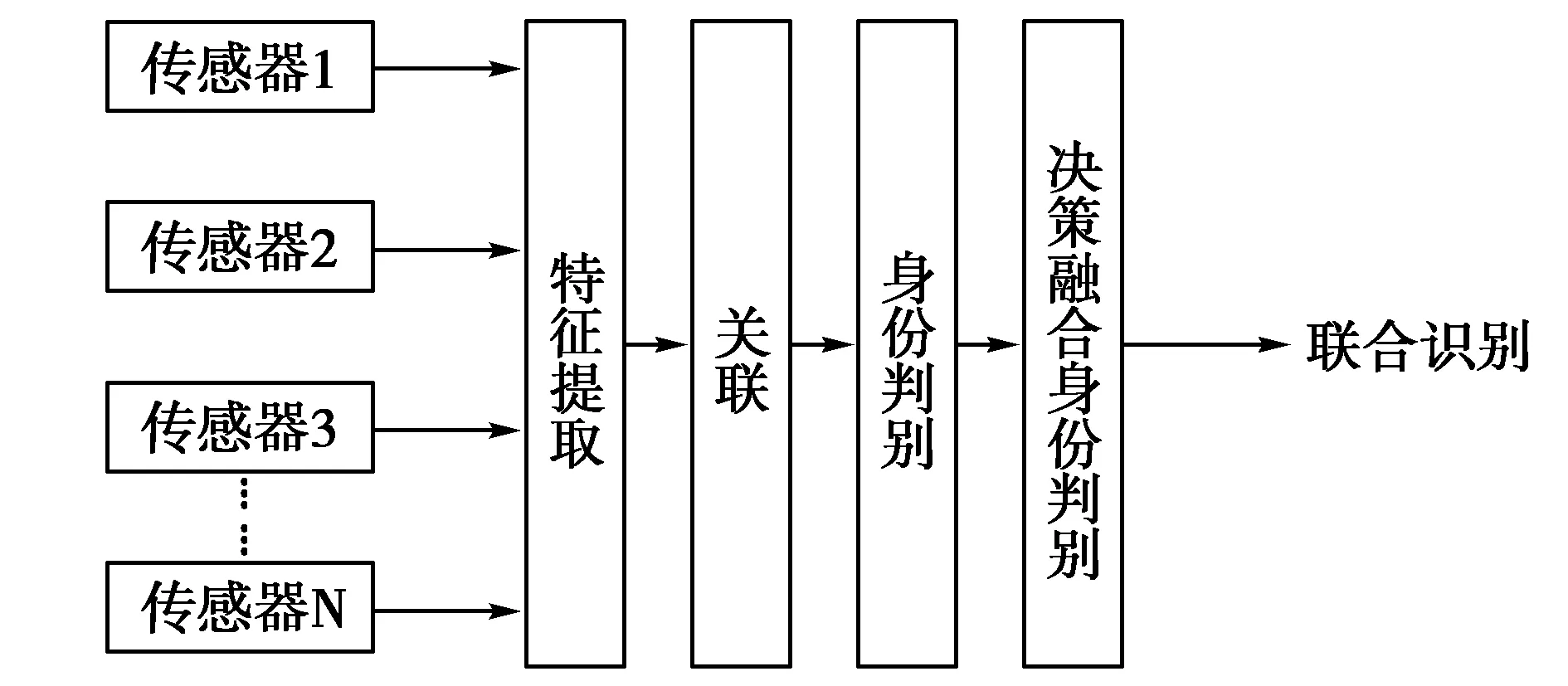
图3 高层决策融合
传感器数据融合技术是无人驾驶汽车发展的关键技术,通过融合多传感器可精确确定无人驾驶汽车前方多目标的角度、速度和位置,大大提高精确度,减少无人驾驶汽车交通事故的发生率。
3 结束语
无人驾驶汽车的研究涉及环境感知技术、导航与定位技术以及控制科学等领域,无人驾驶汽车安全行驶离不开环境感知,而相机、激光雷达、毫米波雷达能够实时获取周围环境、天气、道路状况和驾驶信息,使无人驾驶汽车“感知”自己所处的环境。环境感知技术主要依靠传感器技术,但无人驾驶汽车要求的环境感知技术还需要与导航定位技术、决策和控制技术相互融合,搭载导航技术、匹配电子地图、惯导等才能实现真正意义上的无人驾驶。未来的传感器技术将集成化更强、识别性能和分辨率更高,误差更小。因此,在不久的将来随着传感器技术的不断发展,无人驾驶的感知技术会大幅度提高,安全性和环境识别能力也将随之提高,甚至可能会具有自我适应调节和自我学习的功能。
