绳系拖曳过程中的若干典型张力控制
2020-01-15,,
,,
(1.台州职业技术学院,浙江 台州 318000;2.浙江大学电气工程学院,浙江 杭州 310027)
0 引言
绳系系统是近期研究的一个热点,主要用于空间碎片清理、防止小卫星撞击地球等空间任务[1]。张力控制机构及控制技术是绳系系统的关键技术之一,是主动星实现恒张力拖曳、抑制摆动和消除旋转等目标的执行机构[2]。
国内外开展了许多关于绳系控制结构方面的研究,如Mori等[3-4]研制了一种基于气浮台的绳系试验平台,但是构件集成度低、体积巨大;Menon等[5]设计了依靠摩擦力实现张力控制的机构,但是只能适用于系绳只释放不回收的场合;南京航空航天大学[6-7]研制了绳系系统的实验平台,并设计了相应的张力控制机构,验证绳系回收和释放过程中的最优控制,该机构只可实现简单的收放功能,无张力检测与闭环控制。
针对上述问题,设计并制作了绳系收放装置。该装置采集张力传感器的数据,结合绳系卷绕机构,实现张力的闭环控制。根据系统非线性强、难以精确建模等特点,分析了系统中摩擦力及系绳参数、种类对于张力控制的影响,设计了PD控制策略。最后,在气浮平台上完成了间歇式拖曳实验和消旋实验。
1 张力控制装置
系绳收放装置主要由直流伺服电机、卷筒机构、张力传感器、测角机构和控制单元等组成,如图1所示。直流伺服电机及卷筒机构收放绳,通过系绳的收紧、松弛来实现张力大小的控制。绳子的实际张力值通过张力传感器采集数据,采样频率为1 kHz。测角机构用于测量系绳的摆角。控制单元采用TI公司的DSP28335芯片,采集张力传感器数据,控制直流伺服电机的运动,完成系统张力的闭环控制。
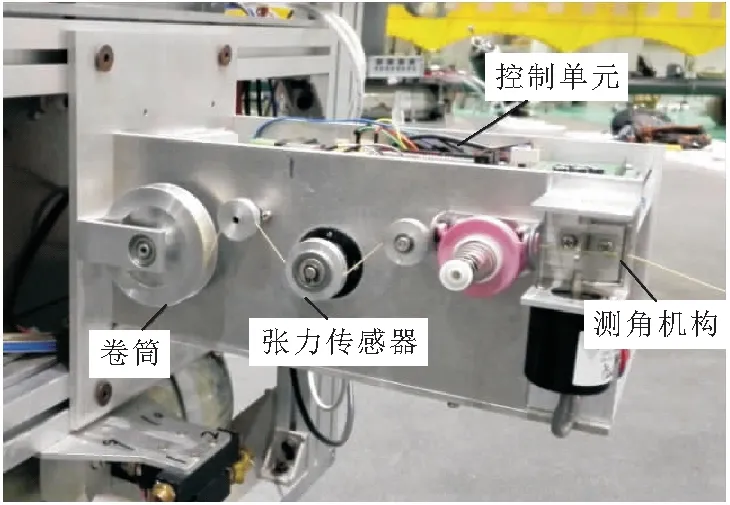
图1 张力控制装置实物
2 PD控制
绳系对象是一个非线性、迟滞的系统,很难建立精确的数学模型。一般采用刚性连杆[8-9]或者弹簧[10]等模型进行替代,但是这些模型与实际的对象差距较大。考虑到PD控制系统控制简单实用,不需要精确了解对象的参数,且具有实时性好、响应快速等优点,因此系统采用PD控制策略。根据设定张力值与实际张力值的差值作PD控制,运算结果作为电机力矩的输入。
(1)
U(t)为运算结果;ΔF为设定张力与实际张力的偏差;KP,KD分别为比例系数与微分系数。
同时,兼顾机电系统的承载能力,在PD控制器的输出端增加了限幅措施。
2.1 摩擦力补偿
系绳收放装置中,系绳与滑轮及角度测量机构接触,均会产生摩擦,导致实际的输出张力值与张力传感器的测量值存在一定的偏差,需要进行补偿。滑轮产生的摩擦力主要是轴承的滚动摩擦力,绳子通过圆孔穿过测角机构,产生的摩擦力主要是滑动摩擦力,摩擦力为
f=F压×μ轴承+f滑
(2)
F压,μ轴承分别为系绳对滑轮的压力和轴承滚动摩擦系数。由于绳子角度与滑轮成120°,根据几何学关系可得F压的值等于系绳的张力值。查询轴承参数可知,μ轴承的值很小,故可以忽略这部分摩擦的影响。f滑表示系绳与圆孔的滑动摩擦力,与系绳的运动速度有关。考虑到系绳运动速度范围为0~2 m/s,故可以近似认为f滑为一个恒定的值[11],经测量为0.03 N。
2.2 系绳特性影响
系绳材料不同,对于相同的外力,变形量亦不相同。在本系统中,绳系收放机构的输出力通过系绳传递给目标星。不同系绳对于相同的张力,表现出不同的轴向特性,主要与绳子的弹性系数有关[12]。弹性系数小的绳子,张力变化缓慢,易于控制。弹性系数大的绳子,张力变化快速,难于控制,对控制系统的响应速度提出了更高的要求。基于此,考虑3种不同弹性的绳子,即胶乳绳、尼龙绳和凯夫拉绳。3种绳子的弹性系数如表1所示。
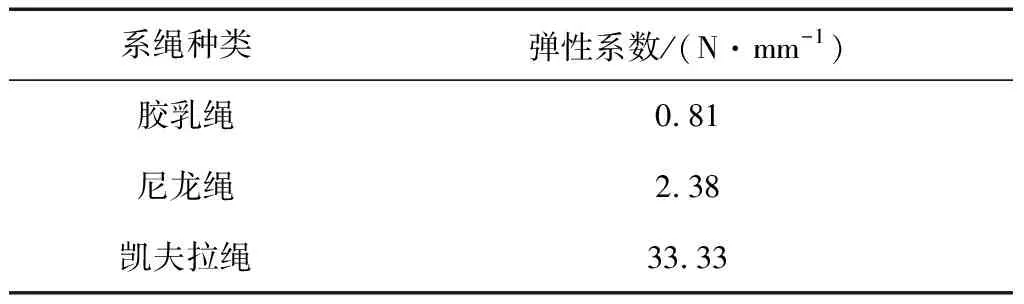
表1 不同材料系绳的弹性系数
由表1可知,3种绳子中胶乳绳的弹性系数最小,凯夫拉绳的弹性系数最大。在相同张力下,胶乳绳变形量最大,凯夫拉绳最小。
针对不同的绳子,需要动态调整系统的PD参数,PD参数与系绳不匹配会导致系统出现震荡、稳态误差大等问题。调节比例系数的目的是调节系统的相应速度。调节微分系数的目的是减少系统的震荡和超调。
实验中主动星与被动星都悬浮,模拟太空中失重的情况,3种系绳跟踪0.3 N的恒张力,其张力平均值及偏差如表2所示。
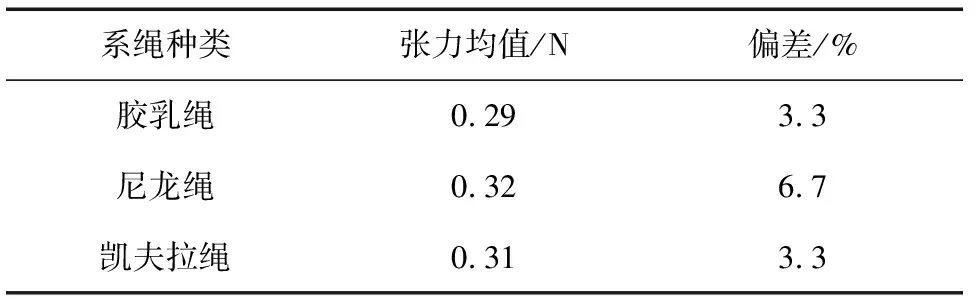
表2 恒张力控制下的张力均值及偏差
由表2可知,针对3种不同的系绳,通过调节PD参数,张力都能稳定在目标的范围之内。系统稳定之后的PD参数如表3所示。

表3 不同材料系绳对应的PD参数
由表2、表3的结论可知,随着系绳弹性系数的增加,控制系统的PD参数都需要相应增加。即针对弹性系数大的系绳,需要系统有更快的响应速度及更好的抑制震荡、减少超调的能力。
凯夫拉绳具有强度高、耐高(低)温、质量轻和柔软性好等优点,太空中常选用凯夫拉绳作为系绳的材料[2],故后续的实验均采用凯夫拉绳。
为了进一步测试装置的张力控制性能,分别测试大张力(2 N)、动态张力(正弦信号)下的性能,测试结果如图2和图3所示。由图2和图3可知,在上述条件下,均能很好地跟踪目标张力值。

图2 凯夫拉绳跟踪2 N张力曲线

图3 凯夫拉绳跟踪正弦信号曲线
3 典型拖曳实验
实验测试平台如图4所示,主动星与被动星通过气浮装置悬浮,模拟卫星在太空中失重的情况。绳系收放拖曳装置固定在主动星上,通过系绳连接到被动星。星体的角度信息、位置数据分别通过陀螺仪和天顶相机采集。

图4 气浮实验平台
3.1 间歇式拖曳实验
考虑到现有航空型谱产品都是大推力器(20 ~200 N),主动星捕获被动星之后,如果持续喷气,燃料消耗过快,故实际中采用间歇式喷气的方案进行捕获。捕获过程中,为了防止出现张力冲击导致系绳绷断或者出现被动星不可控等事故,被动星采用恒定张力拖曳的方式。即要求在此过程中系绳张力保持在一恒定值,不出现系绳松弛或者大张力冲击等情况。
实验环境下间歇式拖曳的参数如表4所示。考虑到实验平台空间有限,主动星只是个模拟卫星,自身体积小,最大连续喷力为1.2 N,故实验中只能以小的喷力模拟太空中的大喷力。被动星采用恒张力拖曳,张力值设为0.3 N。实验中采用先喷气40 s,停止80 s,再喷气80 s,后续依次停止、喷气各80 s循环往复的控制策略。主动星与被动星的速度差Δv及增加距离ΔL如图5和图6所示。由图6可知,主动星与被动星的距离逐渐增加,随后逐渐减少,再增加,再减少,依次往复。
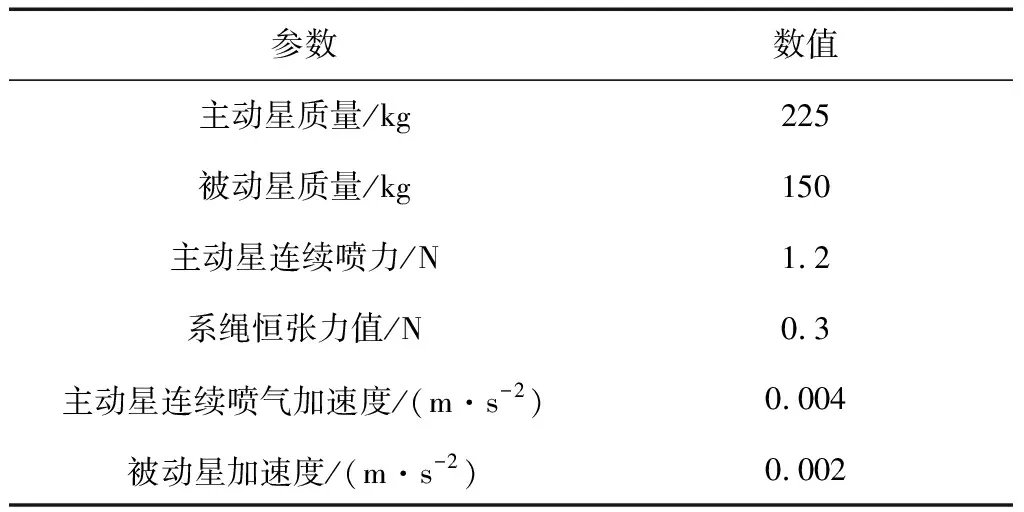
表4 间歇式拖曳主要参数
间歇式拖曳过程中绳子的张力输出曲线如图7所示。由图7可知,张力基本上能稳定在0.3 N附近。中间过程中存在的扰动主要由外界因素的干扰造成,如气浮平台的不平整、绳子没有完全过质心造成被动星小角度的偏转等。
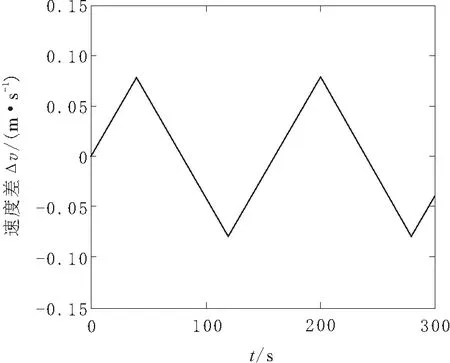
图5 主动星与被动星速度差Δv曲线

图6 主动星与被动星距离ΔL曲线

图7 间歇式拖曳中系绳张力曲线
3.2 消旋实验
主动星捕获被动星过程中,由于受力点不一定都在被动星的质心,故拖动过程中被动星易发生旋转。被动星旋转之后,易出现绳系缠绕、失控等情况,最后导致发生2颗星碰撞、损坏等事故[13-14]。故需要根据主动星和被动星的相对角度、角速度等信息,进行主动性消旋[15]。
本文采取的消旋策略如下:
a.当被动星角速度ω>2 (°)/s时,FT=Fmax。
b.当被动星角度θ过零点时,FT=Fmax-Fmin,随后逐渐按指数规律减少。
c.其他情况,FT=Fmin。
实验中,初始时被动星施加一外力,产生旋转速度。通过主动的消旋控制,被动星的角度、角速度都趋向于稳定位置,如图8和图9所示。
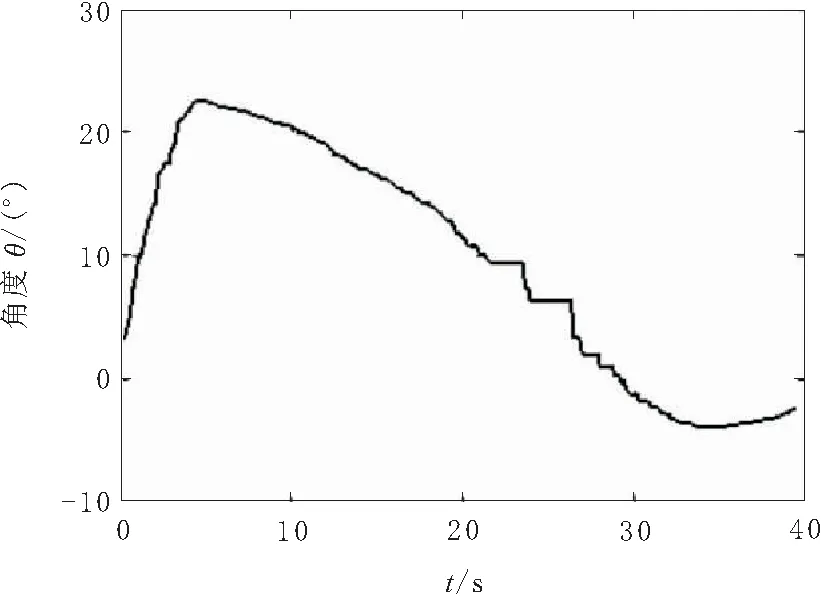
图8 被动星角度θ曲线

图9 被动星角速度ω曲线
收放装置的张力跟踪效果如图10所示。由图10可知,收放装置能很好地跟踪动态张力曲线。
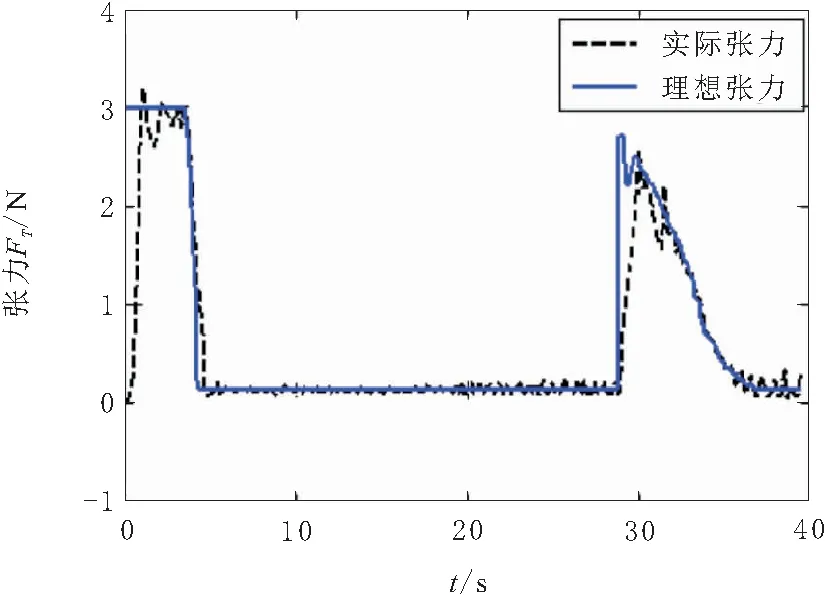
图10 消旋下动态张力跟踪
4 结束语
针对绳系系统的特点,通过分析不同的系绳种类对于系统的影响,设计了闭环张力PD控制策略。完成的典型拖曳实验都取得了良好的实验效果,表明系统输出张力具有稳态误差小、动态跟踪响应快的优点。该绳系收放装置及控制策略为以后的航天型谱产品奠定了基础。但也存在不足的地方,由于气浮平台的限制,实验过程中存在测试时间短、实验现象不够完整等问题,需要在后续的实验中进行改进。