基于自动控制系统的金属智能分类机器人探究与分析
2020-01-09何琪潇王得宏
何琪潇,王得宏*
(武威职业学院,甘肃 武威 733000)
1 禽蛋分级检测中的主要问题
在近几年的研究中,对禽蛋检测这一部分的的投入也越来越多,对检测设备的要求也随之提升。存在的问题主要有以下几方面:
(1)检测设备对破损的、未达标的禽蛋的剔除比较粗糙,在这方面的认识和研究比较少,导致检测设备的工作效率比较低,自动化程度低下[1]。
(2)在光照箱内摄像头采集信息时,主要针对禽蛋在静态时的情况,当禽蛋在快速运动的时候,采集装置也会降低信息的可靠度,势必影响到其检测效率[2]。
(3)对禽蛋外表面的和内部特征检测的准确度还待进一步提升。
2 禽蛋包装作业中存在的问题
与国外的包装工业相比较我国起步较晚,总体而言在技术的成熟度和生产能上还是比较低下,不过在最近几年的发展中,由于受到国外包装业的影响,我国在食品包装和药品包装方面取得很大的成就,但是存在一些问题,具体包括以下两个方面:
(1)在国际上有专门针对包装行业所设计的金属智能机器人,但是考虑到其成本太高,所以,我国一些中小型的禽蛋企业还没有广泛应用,只能使用国内生产的一些简单包装设备。
(2)我国研究的包装机器人大部分都是单一针对包装行业的,并没有将检测这一部分的功能融合进去,所以在检测方面仍然受到一定的限制。
3 禽蛋检测分级的方法
(1)人工分级:就是利用人力对禽蛋进行分级,利用人的眼睛对各种禽蛋的颜色、尺寸、色泽和形状等外部特征的判断来分级。
(2)光电技术:利用光电原理对禽蛋的外壳进行检测,通过观察光的反射能力来判断禽蛋的质量检测与分级。
(3)机器分级:机器分级不仅可以对禽蛋的大小、重量进行检测,而且采用光学处理的方法对禽蛋的色泽和表面裂纹等外部特征等进行检测、分类包装[3]。
4 包装金属装置的整体设计
4.1 禽蛋分级检测装备的设计
依据禽蛋检测的要求,配合检测装备的视觉分级技术,如下图1是禽蛋检测分级装置的总体结构,大致是由禽蛋输送系统、视觉检测系统、分级执行装置、PC机、PLC等几部分组成。
禽蛋检测分级装置的工作原理如图2所示,结合图1和图2可以得到禽蛋检测分级装置的工作原理。

图1 禽蛋检测分级装置
禽蛋进入传送装置,禽蛋随着传送链的带动向前运动,当进入到视觉检测装置时,光照箱下方的摩擦板与禽蛋辊筒相接触,禽蛋在摩擦力的作用下一边滚动一边移动,装在光照箱上的摄像头在禽蛋的滚动中拍摄表面图像,并将这些表面图像传送到PC机中,通过PC机中的图像处理软件的分析和检测来判断禽蛋的品质,未能达标禽蛋的信息通过PC机将此信号传输到PLC中,PLC驱动分级执行机构在出口剔除,完成禽蛋的分级作业。
4.2 禽蛋包装装置的结构设计和各部分的工作原理
禽蛋自动拾取包装系统主要的组成有三部分,分别为禽蛋运输装置、震动矫正装置以及禽蛋拾取执行装置,禽蛋运输装置主要执行禽蛋的运输和收集;震动矫正装置主要执行传送带上禽蛋的顺序规律,可以将禽蛋从无序状态变为有序状态;禽蛋拾取执行装置主要用来执行禽蛋的抓取和存放,如图2所示。
4.2.1 禽蛋运输装置
该装置的设计过程中,考虑到金属制造成本的问题,采用在传送带上附上硅胶条的方法,既能节约成本,又能满足禽蛋在输送带上向前运动的要求。禽蛋运输装置主要是由5部分所组成,分别为硅胶槽传输带、主动滚筒和从动滚筒、传输带压紧装置以及电机。传输带禽蛋槽表面的材料采用硅胶所制,把传送带划分为若干个相等体积的蛋槽,每个蛋槽底部成圆弧形设计,在传送带的长度方向上由直线分割,在宽度方向上由弧线分割,蛋槽的深度为禽蛋宽度的一半,槽宽和槽长都比禽蛋的实际尺寸稍大,这样一来在更大程度上满足禽蛋的存放和运输。为了防止传送带经过主、从动滚筒时表面硅胶蛋槽被破坏,在蛋槽宽度方向上有一条开缝,附有硅胶蛋槽的传送带在驱动滚筒和从动滚筒的带动下运转,从而确保了禽蛋的匀速传输。传送带金属压紧装置安装在传送带的中部,将传送带分为震动矫正区和禽蛋拾取区,矫正区的作用是利用震动是每个禽蛋都能填充到每一个蛋槽内。
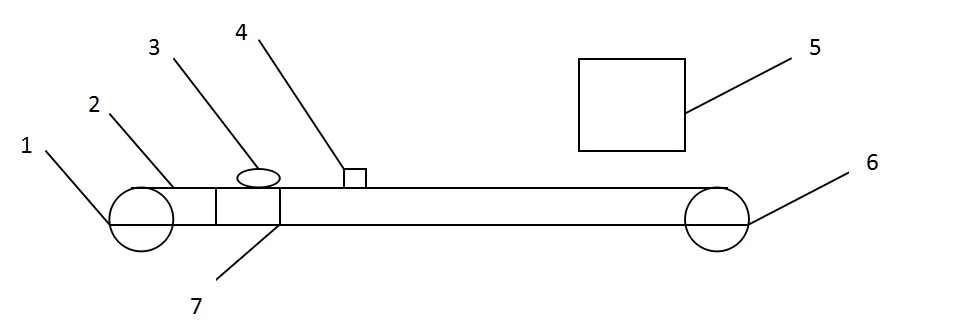
图2 禽蛋自动抓取系统示意图
4.2.2 震动矫正装置
震动矫正装置主要由三部分组成,分别为弹簧、金属敲打部件、脉冲电磁铁。
设置若干个震动矫正装置在矫正区的传送带集蛋槽的下面,敲打部件上方设有齿状物,为了尽可能减少禽蛋受到敲打力而产生的破坏,齿状物用橡胶材料,金属敲打部件下方设有由脉冲电磁铁控制的弹簧,传送带上的禽蛋在敲打部件的作用下由随机无序的分布变得有序,使得每个禽蛋都能落入相应的蛋槽,完成禽蛋的矫正作业,如图3所示。

图3 震动矫正装置示意图
4.2.3 禽蛋拾取执行装置
在禽蛋拾取执行装置的设计过程中,传送带的硅胶槽内不一定都放慢禽蛋,这就需要有一套检测装置,考虑到成本的问题,采用一种光电开关对硅胶槽内是否有禽蛋进行检测,如果有,那么依据传送带的传送速度推算出每个禽蛋的动态特性,PLC控制系统控制机械手跟踪并在相应的位置将禽蛋吸起,然后按照提前设定好的路线放入到托盘中,此装置具有禽蛋位置识别功能。禽蛋拾取执行装置主要由并联拾取结构和控制系统组成,并联拾取执行装置又有以下三部分组成,分别为主、从金属动臂和拾取金属机械手所组成,拾取金属机械手的组成简易图,如图4所示。
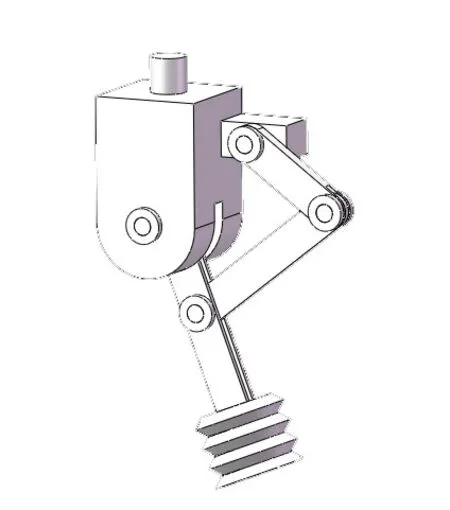
图4 拾取金属机械手的三维图
真空吸盘是通过气泵的吸气作用使其形成一定的压强差而吸起禽蛋;旋转金属舵机用来控制末端执行器的水平旋转,来满足抓放禽蛋的工作要求;提升金属舵机用来控制真空吸盘的升降,能够使得真空吸盘向上旋转90°,在禽蛋放入硅胶蛋槽的时候能够竖直的放入。
5 结语
禽蛋检测包装金属智能机器人,显而易见就是对禽蛋进行分级和包装两部分。在禽蛋的分级这一块,设计一套不仅对禽蛋的外部特征、而且用相应的设备对禽蛋的内部品质进行检测,从而能够依据检测的结果对其进行准确的分类,这些作业都是由一个关节金属智能机器人来完成对禽蛋的检测分级和包装实现全程自动化作业。