基于三维块匹配与改进Top-hat的红外图像目标检测方法
2020-01-08邹金慧
马 烜,邹金慧
(1.昆明理工大学信息工程与自动化学院,云南 昆明 650500;2.云南省矿物管道输送工程技术研究中心,云南 昆明 650500)
0 引言
红外热成像无损检测技术是一种新的无损检测技术。它具有快速、检测效率高、大范围、直观、全天候及可远距离非接触检测等优点。其检测原理为:对被测物进行加热,同时使用热像仪记录被测物体的温度场,由于被测物体中有缺陷部分与无缺陷部分的导热性不同,将产生热流的不均匀,从而造成被测物体中有缺陷和无缺陷部分各自对应的温度不同,从而可以判定是否存在缺陷[1]。
红外热成像无损检测系统易受干扰,获取的红外图像普遍存在噪声大、对比度低、非均匀背景干扰的问题。因此,增强红外图像对比度,突出图像中的目标信息就成为了红外无损检测技术中的重要研究内容[2-4]。学者们提出了许多图像增强方法,主要有滤波器、数学形态学[5]、小波变换[6]处理等方法。这些方法虽然取得了一定的效果,但是对于复杂背景干扰下处理效果不理想。针对在复杂背景干扰下难以精确检测出红外目标的问题,本文提出了基于三维块匹配与改进Top-hat的红外图像目标检测方法。
1 BM3D和改进Top-hat变换
1.1 三维块匹配
设原始含噪图像为:
z:X→R,z(x)=y(x)+η(x)
(1)
式(1)中,x∈X是坐标点,y表示去噪图像,η表示高斯噪声。BM3D算法可分为基础估计部分和最终估计部分[7-9]。
BM3D算法第一步为基础估计部分。首先选定参考块,并以此参考块为中心在一定区域内搜索此参考块的相似块,块之间相似度的大小为:
(2)

(3)
将所有处理完的图像块进行像素点的加权平均,从而重构出基础估计图像。
(4)

基础估计已经完成,接着对初步去噪图像进行最终去噪,重复进行上述步骤,与基础估计不同的是将硬阈值滤波替换为维纳滤波,维纳滤波的收缩系数为:
(5)
经过最终估计之后得到最终的去噪图像。

图1 BM3D去噪原理图Fig.1 BM3D denoising schematic
1.2 改进Top-hat变换
传统Top-hat变换只使用单一的结构元素,虽然能够抑制大部分背景,但在复杂背景下仍会残留少量噪声和杂波干扰,也会腐蚀目标区域的边缘信息,这对于后续的目标检测非常不利[10-14]。因此,提出改进Top-hat变换利用多尺度结构元素来估计背景图像。
其中,圆形结构元素是常用结构元素之一,如图3所示,ΔS为一个平面圆环形的结构元素,ΔS=So-Si,So为外层的平面圆形结构元素,Si为与So同心的内层结构元素。Sb和So为大小相等的平面圆形结构元素。
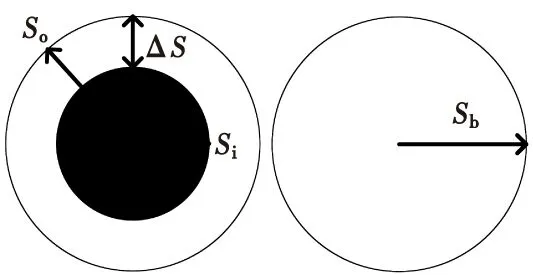
图2 结构元素Fig.2 Structural element
设n个尺度的结构元素被使用,结构元素在每个尺度i(1≤i≤n)上的大小尺寸逐渐改变,如式(6)和式(7)所示。
Soi=So+i×nB
(6)
Sbi=Sb+i×nB
(7)
式中,nB为结构元素尺寸大小增长的步长。
改进的Top-hat变换利用两个具有相同形状的圆形结构元素Sb和So,ΔS=So-Si。基于Sb和ΔS,提出了新的开闭算子,其定义如下:
f·Soi=(f⊕ΔS)ΘSb
(8)
f·Soi=(fΘΔS)⊕Sb
(9)
白帽和黑帽运算可定义为:
NWTH(x,y)=f(x,y)-f·Soi
(10)
NBTH(x,y)=f·Soi-f(x,y)
(11)
对于开闭运算f·Soi和f·Soi来讲,如果所处理的区域不是目标区域,这样就可能导致在运算操作中会产生负的灰度值。因此,NWTH和NBTH可修改定义为如下的形式:
NWTH(x,y)=max((f(x,y)-f(x,y)·Soi),0)=
f(x,y)-min(f(x,y)·Soi,f(x,y))
(12)
NBTH(x,y)=max((f(x,y)·Soi)-f(x,y),0)=
max(f(x,y)·Soi,f(x,y))-f(x,y)
(13)
从定义中可以看出,改进的Top-hat变换相比于经典Top-hat变换在膨胀和腐蚀运算上顺序相反,并且采用结构元素ΔS和Sb,充分地利用了结构元素的边界信息,更好地凸显了目标区域信息。
2 基于三维块匹配与改进Top-hat的红外图像目标检测方法流程
主动式红外无损检测中的红外图像存在非均匀背景干扰、噪声大、边缘模糊、局部对比度差的共性问题,且存在的噪声主要为高斯噪声,集中在频域中高频部分。现有图像增强方法在去噪同时对于图像边缘信息损失较大、频域中高频部分噪声难以去除,且经典Top-hat算法主要存在结构元素选取单一、对于复杂背景图像目标检测精度低等缺陷。鉴于此,本文提出了基于三维块匹配与改进Top-hat的红外图像目标检测方法,该方法首先采用三维块匹配算法对红外图像进行滤波,在滤波的同时能更好地保留图像的边缘信息;其次构建改进Top-hat算子,利用不同大小、不同形状的结构元素对滤波后图像进行背景估计,得到校正后图像。最后对校正后图像进行阈值分割,得到目标图像。流程如下:
1) 将采集过来的红外图像,利用BM3D算法进行去噪,提高图像的对比度。
2) 对去噪后图像利用改进Top-hat算法消除图像的非均匀背景干扰,得到校正后图像。
3) 将校正后图像进行阈值分割,得到目标图像。
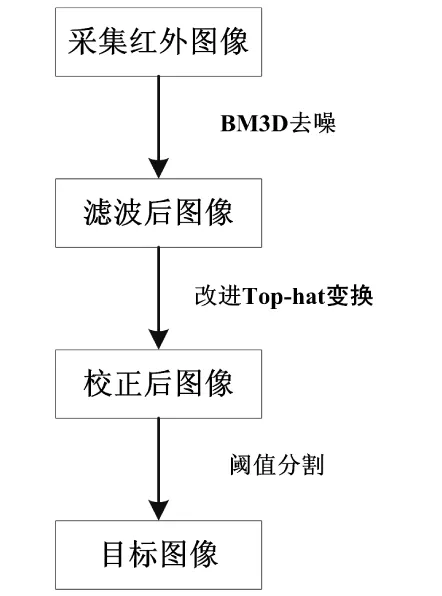
图3 红外图像目标检测方法流程图Fig.3 Flow chart of infrared image target detection method
3 实验及结果分析
3.1 实验概述
本实验采用实验室自主研发的电涡流加热无损检测装置对试件进行检测研究。检测系统中主要包括热像仪、电涡流加热装置、上位机和其他装置。红外热像仪型号为HT18,其光谱响应范围为8~14,热灵敏度为0.07 ℃,测试测量精度±2%或±2 ℃。脉冲激励装置为实验室自主研发的电涡流加热装置。检测时,电涡流加热装置与热像仪置于被测物体上方,如图4所示。
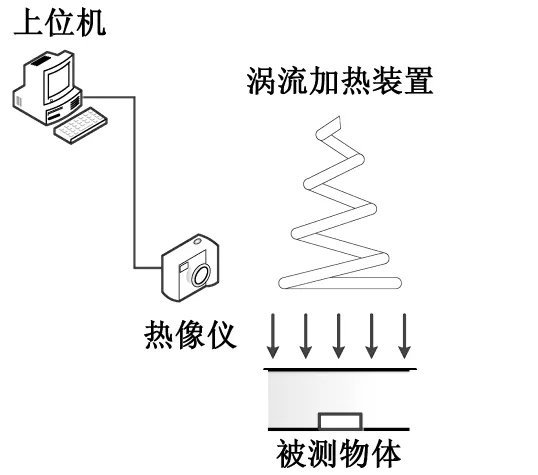
图4 红外图像目标检测方法示意图Fig.4 Schematic diagram of infrared image target detectionmethod
试件为一块铁制部件,铁制部件内部含有不同方向的缺陷,使用检测系统进行检测,从4种不同缺陷的红外图像序列中各选取一帧进行分析。本实验选取尺度数为n=9,So=Sb=10,ΔS=2。
3.2 结果处理分析
对实验中获取的红外图像采用本文提出的方法进行目标识别,并将处理结果与经典Top-hat算法处理结果进行对比,如图5所示。
图5(a)为实验采集的原始图像;图5(b)为原始图像的三维灰度分布图; 图5(c)为经典Top-hat算法对原始图像进行目标识别的对应实验结果图;图5(d)为经典Top-hat算法三维灰度分布结果图;图5(e)为本文算法对原始图像进行目标识别的对应实验结果图;图5(f)为本文算法三维灰度分布结果图。通过本文方法与经典Top-hat算法的实验结果
图对比可以看出,经典Top-hat算法在分割红外图像目标时虽然分割出了目标信息,但图中分离出的目标均含有不同程度的虚警信息,且部分出现目标断裂,使得目标信息失真,难以准确识别图像中的目标区域,对于后续的特征提取、目标跟踪、识别等处理会造成很大的影响。而本文提出的算法能够更精确地检测出红外图像目标信息。从图5(e)中可以看出,本文提出的方法准确地分割出了红外图像的目标信息,没有虚警信息。其主要原因为本文方法在图像去噪的同时较好地保存了图像边缘和细节上的信息,且改进Top-hat算法利用不同大小、不同形状的结构元素更好地抑制了背景干扰,使得后期红外图像分割更加准确。

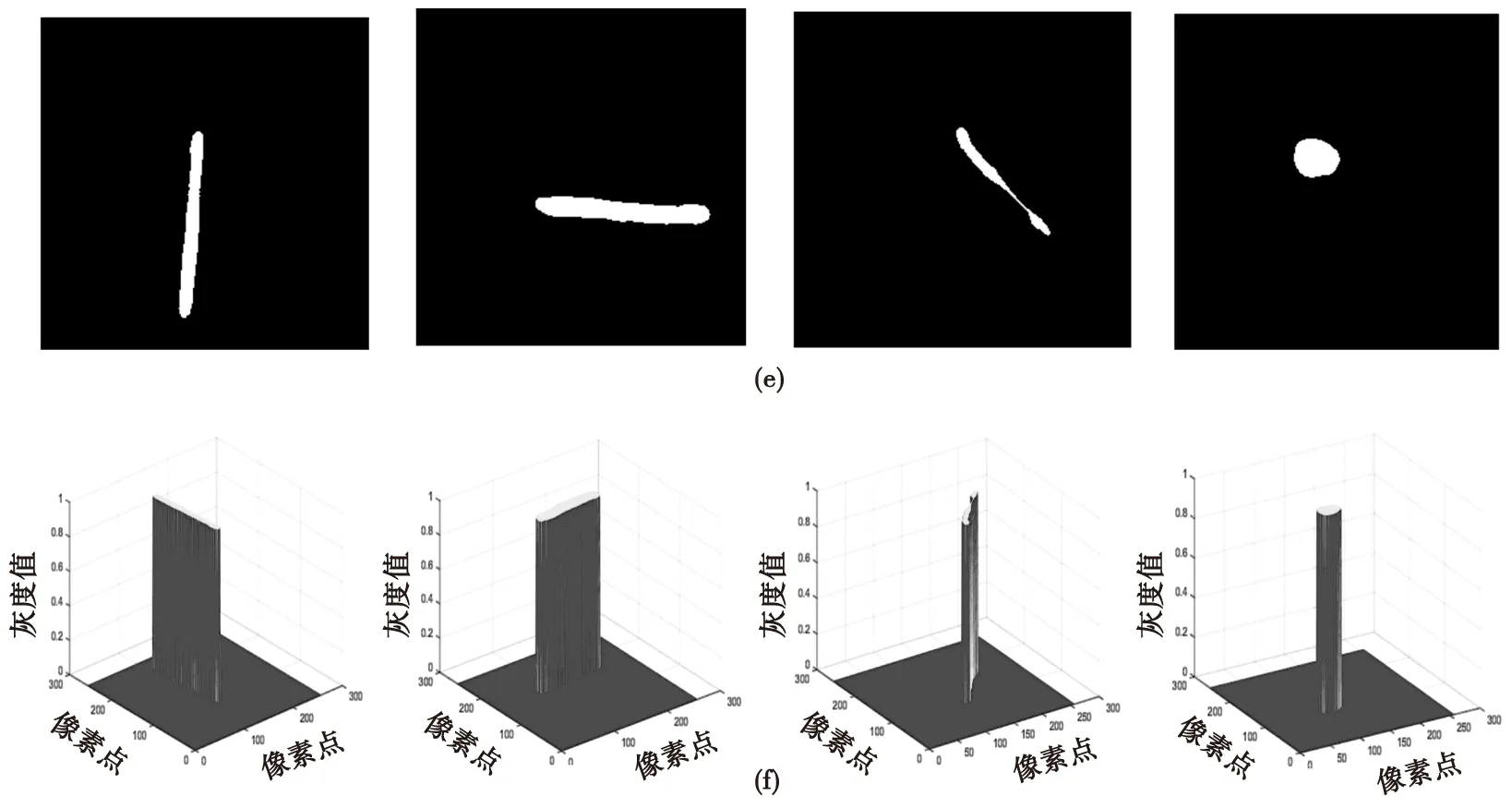
图5 方法对比结果图Fig.5 Method comparison result diagram
为了更好地验证本文提出算法的有效性,本文采用背景抑制因子BSF、均方误差MSE和峰值信噪比PSNR来评价本文算法的有效性,实验结果如表1。
峰值信噪比定义如下:
(14)
式(14)中,Yij和Xij分别表示去噪后图像和原始图像,m、n分别表示图像的行列。
PSNR值越大,表明对于图像的去噪能力越强。
均方误差定义如下:
(15)
式(15)中,Yij和Xij分别表示去噪后图像和原始图像,m、n分别表示图像的行列。
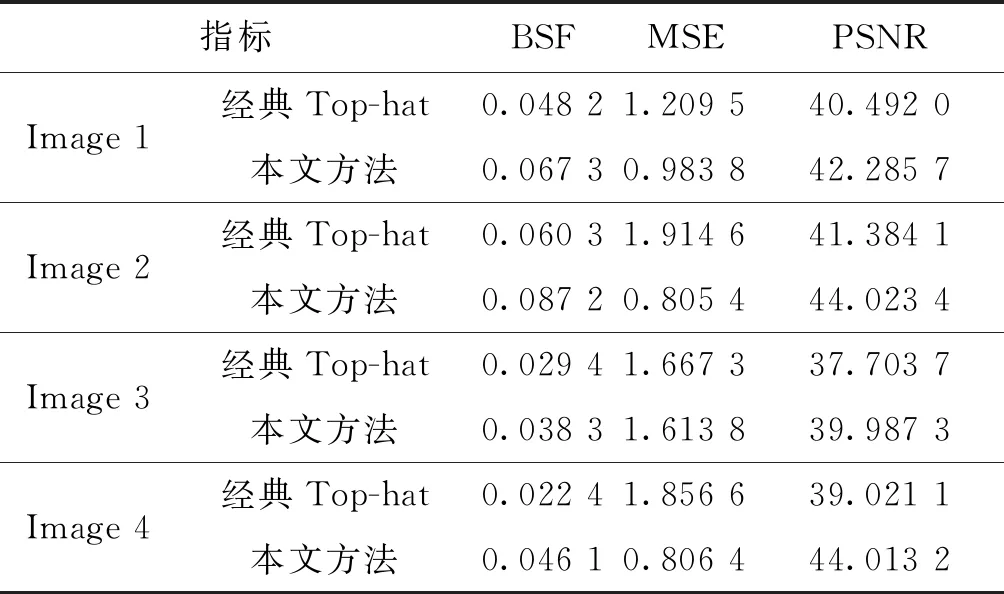
表1 不同算法性能比较Tab.1 Comparison of performance of different algorithms
MSE值越大,表明图像失真越严重。
背景抑制因子定义如下:
(16)
式(16)中,σout和σin分别为去噪后图像均方差和原始图像均方差。
BSF值越大,表明图像背景抑制效果越好。
由表1结果可知,本文提出算法得到的图像在均方误差MSE值上有显著下降,并且在峰值信噪比PSNR和背景抑制因子BSF值上有所提高,说明该算法在增强对比度和非均匀加热背景抑制方面均好于经典Top-Hat算法。
4 结论
本文提出了基于三维块匹配与改进Top-hat的红外图像目标检测方法,三维块匹配算法在滤波同时可以更好地保护图像边缘信息;改进Top-hat变换利用不同大小、不同形状的结构元素更好地解决了主动式红外图像中存在的非均匀加热背景干扰的共性问题,从而使得后期图像的分割更加准确。仿真实验结果表明,本文提出的方法能够有效地增强红外图像对比度、抑制噪声干扰、减弱非均匀加热背景的影响,从而突出红外图像目标信息,使得复杂背景干扰下红外图像目标检测更加准确。为后续的特征提取、目标跟踪、识别等处理奠定了基础,具有较广泛的应用价值。
