刍议无人机航测系统外业像控
2020-01-07何清平
何清平
(贵州水利水电职业技术学院 贵州省清镇市 551416)
当前,固定翼轻型无人机技术快速发展,相关的GPS自动驾驶技术也得到广泛应用,借助无人机能够进行有效的地质勘测和地形地貌的绘制,这类无人机体积比较小,使用起来也比较灵活,无需专门的跑道来起降,能够在短时间内快速采集多种信息,获得比较全面的影像资源,目前,在城市规划、新农村建设、赈灾救济、地理勘测等工作中都有不同程度的应用。不过,目前的无人机航测系统搭载的相机多为单头单反相机,相应的相机生成的影像幅面不大,还有一定的光学畸变问题,将其直接用到测绘生产中还是不适用的,需要进行畸变矫正后才能应用到相应的数字摄影测量系统中。
1 无人机航测系统的结构分析
现阶段的无人机主要是借助无线电遥控设备以及自制的程序控制装置操作的无人飞机。而其中的航测系统则是将无人机作为主要的驾驶飞行平台,借助相数码相机来实施拍摄,通过对于相关航测数据处理软件的应用来对于采集的数据进行处理。就目前的无人机航测系统的主要结构来看,主要包含以下几个主要部分:
①无人机飞行平台;②飞行控制系统;③影像获取设备;④通信设备;⑤遥控设备;⑥地面信息接收以及处理设备等。
其中,飞行控制系统是进行无人机飞行控制的关键组成部分,在这一系统中,通过有效的控制达到对于无人机稳定飞行姿态的垂直陀螺控制,借助GPS接收天线来获得相关的飞行平台位置获取的相关数据信息等,还有关键的就是进行飞机自主飞行控制的微处理器装置。无人机飞行控制中,还需要用到地面配套设备,借助实时影像接收以及显示的数据接收终端,而数码相机的作用主要是对于地面高清影像进行数据处理,做好飞机的起降控制,对于飞行好拍摄的遥控设备也需要做好配套。
在无人机航测的过程中,垂直陀螺能够有效获取相关无人机的俯仰、翻滚姿态。这一技术和微处理装置技术结合起来,能够确保无人机在飞行中保持水平状态。在机载通信设备中,包含摄像头、GPS定位、数据传输系统等,能够及时将采集的数据信息等传输到地面的数据接收终端设备中,这样就能够确保地面控制中心能够针对飞机的飞行以及拍摄情况实施有效的监控,做好无人机的航向修正,防止无人机的飞行姿态偏离。最后能够蝴蝶高清影像,借助地面配套数字摄影测量工作站来进行影像处理,得到最后的数据影像。因为相关的影像具有一定的重叠度、倾斜角等,和传统摄影测量的差距比较大,因此相关影像处理方法和传统的影像处理是有一定差异的,图1为无人机航测系统的主要结构。
2 无人机航测系统精度问题
2.1 无人机航测数据精度的主要影响因素
在无人机航测系统应用中,因为相关影响因素作用,会导致相应的航测数据结果出现一定的误差,目前,针对无人机航测系统数据精度会带来误差的因素包括测量中使用的仪器自身存在的误差、人为因素带来的误差、气候条件导致的误差等等。
首先,测量仪器自身的误差问题。一些测量仪器对于精度要求比较高,但是在设计以及制作中,可能会存在一些缺陷,这样就会导致即使是进行测量仪器的校验后,在使用中依然难以避免残余误差影响,这些残余误差多是指因为传感器量化过程导致系统性的误差问题出现。
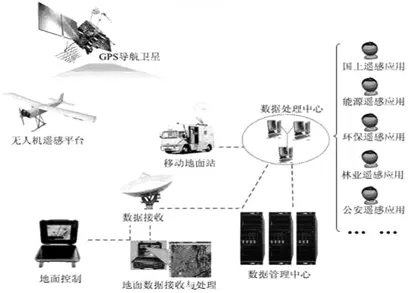
图1 无人机航测系统的主要结构
其次是人为误差因素。这主要是因为相关的控制人员自身的感官鉴别能力比较有限,自身的技术能力以及工作态度等影响,会导致他们在工作中出现一些错误,导致误差出现。此外,还有一些类似像控识别、立体采集、空三加密等等也会存在人为误差,影响最终的无人航测精度。
最后是外界环境因素影响。一些不良的气候状况和天气会对于无人机的飞行带来一定的影响,例如大风、沙尘暴、雨雪天气等,不仅会影响无人机的正常平稳飞行,还会导致摄像机的像素受到影响,导致相应的数据采集存在误差。
2.2 无人机航测摄影误差的分析
考虑到无人机航测系统是受到自身体积以及栽种等因素影响的,因此,它不能正常承载普通航摄仪来进行空中飞行和摄影航测。目前,很多无人机航测中多是使用中幅面CCD来充当传感器的感光部位,借助必要的加固以及相应的电力改装,是其能够作为摄影性能比较稳定的数码相机使用。不过,因为感光单位的非正方形因子、非正交性以及畸变问题,因此会导致数码相机在摄像中也会出现一些误差。针对这一问题,可以开发使用高性能、能够适用无人机航摄需要的数码装置来替代传统数码相机,还可以借助相关的修正软件来对于测量结果实施修正,保证可靠性,借助相关数据积累构成比较真实的修正方式,这是目前解决这一误差问题的最有效方法之一。
2.3 无人机航测系统像片控制测量误差
在无人机的像控点进度中,最主要的就是控制刺点精度以及观测精度。在满足相关观测精度要求下,刺点进度则是对于像片控制测量精度的关键影响因素。不过,在实际的应用中,因为无人机的像幅相对较小,对此,可以尝试使用像控点范围缩小来实现,在像控点布设位置中一般很难找到刺点的位置,尤其是在荒无人烟的野外。对此,需要在航线网区域中进行相应像控点的布设,保证无人机的摄像能力能够有效的寻找到地物刺点。像控点的精度和数量直接影响到航测数据后处理的精度,所以像控点的布设和选择应当尽量规范、严格、精确。
通常情况下,不同翼型的无人机,像控点的布设数量也有所区别。以复合翼无人机为例,假设飞1:1000的比例尺成果,3个平方公里的区域布设5个像控点合适,7~8个平方公里10个像控点合适。
3 总结
基于无人机平台的航测系统,作为一种低成本、高效率、易操作的遥感影像获取手段,应用非常广泛,但这一技术应用还存在飞行姿态不稳定、相机相幅小、影像畸变差大、重叠度不规则等问题。针对无人机航测系统外业像控存在的精度和误差问题,需要进一步做好相应的解决方案,针对像控精度的影响因素进行把握,并做好有效的像控点布设工作,确保误差控制在合理范围内。
