一种调度监控自动巡检系统的开发和应用
2020-01-07马伟天陈文刚郭晓军
马伟天, 陈文刚, 郭晓军
(国网晋城供电公司,山西 晋城 048000)
0 引言
建设坚强智能电网是国家电网公司的重大发展战略。随着投运变电站数量的增加,电网规模越来越大,网架结构越来越复杂,体现电网状态的信息也越来越庞大。现阶段,晋城地调监控的范围包括13 座220 kV 变电站、41 座110 kV 变电站,15 000余个遥测点、60 000 余个遥信点、2 200 余个遥控点,每一组当值监控人员在值班期间对上述内容至少进行2 次全面巡视、1 次正常巡视,每次巡视的监控画面超过200 张。庞大的基础数据造成了值班监控员巡视工作任务繁重,而且自动化数据异常具有很大的随机性、突发性、偶然性。这些均导致了监控员在庞大的数据库中排查筛选异常数据成为日常工作的重大负担。另外,电网中大量的一次、二次设备常年运行,存在设备老化、磨损等情况,容易造成数据采集不准确、信息传输不稳定、遥控操作不可靠等问题,这些问题也增加了监控员的工作强度和工作压力。根据统计,在遥控操作的高峰期每天有20 次以上的遥控操作,单月超过600 次,即使设备遥控操作可靠率达到了99.5%,在操作高峰期时每个月仍可能会出现3 次左右的遥控失败事件,失败频率依然较高。电网运行数据的异常会导致调控人员对电网运行情况把握失真,造成误判断、误操作;遥控失败会延误操作,严重时扩大故障,甚至引发电网安全事故。因此,及时发现异常的“三遥”信息对电网安全稳定运行具有决定性的作用。现阶段,如何提高电网基础数据巡视效率、遥控操作的成功率和减轻地调监控人员工作压力成为现阶段自动化维护人员面临的一个重要问题。
本文首先介绍监控员巡视工作中经常遇到的问题以及“三遥”信息异常的可能原因和类型,然后根据异常“三遥”信息的不同类型和原因采取相应的自动巡检算法,最后基于自动化主站系统的二次开发,实现了自动巡检系统与自动化主站EMS600系统的融合,取得了较为理想的巡检结果,达到了预期的目的。
1 监控工作中存在的具体问题
1.1 遥测异常原因及类型
遥测是自动化系统“三遥”功能中最重要的功能之一。遥测即远方测量,将现场对象参量的测量值传输至远距离的调度中心来实现远距离测量的技术。
遥测异常按范围主要分为3 种情况:第一种情况是全站数据异常,通常因为通道异常或通信管理机死机导致,表现为全站数据无变化;第二种情况是变电站内同一电压等级下的数据异常,通常是由PT 异常或站控层通信异常造成的;第三种情况是站内与母线相关的单个间隔数据异常,通常由间隔测控异常或CT 变更问题造成,表现为该间隔数据无变化或成倍变化。
1.2 遥信异常原因及类型
遥信主要是指开关的位置信号、变压器内部故障综合信号等涉及开关位置信号的总称。遥信数据异常一般分为3 种情况。一是一个测控装置的所有遥信数据都不刷新,或者单个遥信数据不刷新。二是遥信值和实际值相反,通常是指装置的遥信信息与遥测数据互相矛盾的情况。比如遥信信息显示开关为断开状态,但开关电流的遥测值不为零而且远远大于零漂,两者相悖。三是遥信错位,测控装置上的遥信电缆接错端子或者是遥信库定义错位。
遥信异常主要是由于接点接触不良、抖动、电磁干扰、信号源误报、测控装置异常等原因导致的,异常类型通常表现为某一路遥信不对、多路遥信不对、大量开关变位时遥信信号丢失等。
1.3 遥控预置异常原因及类型
遥控预置异常主要是由于以下原因所导致:一是变电站远动装置与远动主站之间通信中断导致全站无遥测、遥信、遥控功能;二是变电站远动机或者远动主站数据库参数定义错误;三是测控装置或者操作机构异常,装置存在逻辑闭锁情况;四是开关位置继电器或者刀闸辅助接点接触不良,不能反校开关或刀闸实际位置;五是智能变电站GOOSE链路或者GOOSE 发送与接收不匹配,智能变电站智能终端或过程层网关机失电或者运行异常。
遥控预置异常通常表现为监控主站发出“遥控预置”命令后,经过一段时间后未收到反校信号,发出“反校超时”“反校错误”的信息。
2 自动巡检系统具体实施方法
调度自动巡检系统对主站数据进行挖掘,在海量数据中获取母线、主变、断路器等变电站关键设备的遥测、遥信等数据,并对该数据进行分析和合理性校验,从而对厂站的设备状态进行实时的检测和预警。
2.1 遥测巡检算法实现
由于变电站全站数据异常时的表现较为明显,当全站数据不刷新时EMS600 会自动报警并提示全站数据不刷新,故在文章中不再做重点阐述。对于同一电压等级数据异常以及单个间隔的数据异常,文章研究了如何针对遥测数据的自动巡检系统来进行判断。
自动巡检系统的实现算法流程如图1 所示。
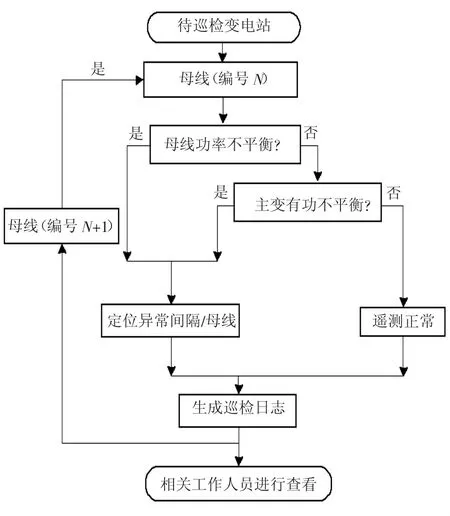
图1 遥测巡检算法流程图
遥测自动巡检算法步骤如下。
a) 在变电站一次主接线图上对需要巡检的母线进行1 至N编号,并确定首先要进行巡检的母线编号为kyc。
b) 自动巡检系统对流入母线编号为kyc的功率与流出的功率进行采样,并判断流入的功率是否等于流出的功率,当两者相等时称之为母线平衡,反之称之为母线不平衡。如果母线功率不平衡,则单个间隔数据异常;若母线功率平衡,则继续对站内流入与流出主变的功率进行采样,若主变流入与流出功率平衡则认定母线遥测数据正常;若主变流入与流出的功率不相等则认定母线(kyc)整体遥测数据异常。
c) 将巡检结果生成巡检日志,并自动对编号为kyc+1 的母线进行巡检,直至第N条母线巡检完毕。
d) 将巡检日志提供给相关人员查看。
2.2 遥信巡检算法实现
遥信自动巡检判断遥信异常的依据主要是结合遥测。遥信巡检主要是判断遥信信息与遥测数据是否相互矛盾。遥信巡检算法流程如图2 所示。
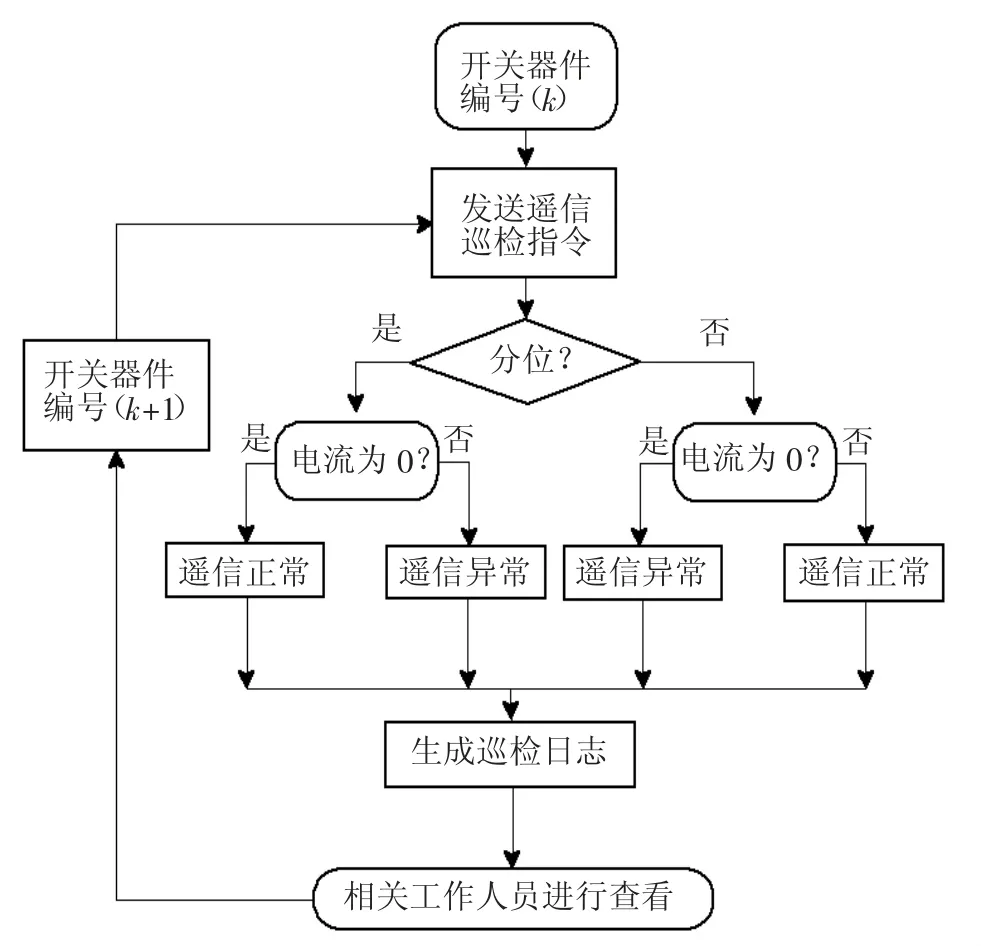
图2 遥信巡检算法流程图
遥信巡检的算法步骤如下。
a) 对站内需要巡检的开关进行1 至N编号,正在巡检的开关编号为kyx。
b) 比较开关kyx采集的遥信信息与流经开关kyx的遥测数据。
c) 遥信异常的判断依据为:如果开关kyx的遥信位置为分,但是流经开关的电流不为0;或者开关kyx的遥信位置为合,但是流经开关的电流为0,遥信自动巡检将这两种情况进行报警。
d) 将开关kyx巡检结果生成巡检日志,依次再对(k+1)yx进行巡检直至N结束。将巡检结果提供给工作人员进行查看。
2.3 遥控巡检算法实现
遥控自动巡检的主要依据是对开关进行遥控预置,并判断反校结果,根据反校结果生成巡检日志。遥控巡检算法流程如图3 所示。

图3 遥控巡检算法流程图
遥控巡检的算法逻辑步骤如下。
a) 对巡检变电站内需要巡检的开关进行1~N编号,正在巡检的开关编号为kyk。
b) 系统自动对开关kyk进行遥控预置。
c) 如果开关kyk遥控预置结果为反校成功,则巡检结果为预置成功;若反校结果为超时、反校错误,则巡检结果为设备不可控。
d) 将步骤c) 的巡检结果生成巡检日志,并对编号为(k+1)yk的开关进行巡检。
3 自动巡检系统的应用
为了验证该巡检算法的正确性和可行性,分别对遥测、遥信、遥控进行了实验验证。
3.1 遥测自动巡检
由于天脊站为用户站,数据不采集,所以对天脊站进行实验验证。对天脊站进行遥测巡检的检测结果显示,天脊站有功功率不平衡,不平衡率为24.17%。
通过对10 kV 母线的巡检,巡检结果为I 母有功功率不平衡,不平衡率为48.64%,自动化主站实时界面上显示10 kV 的I 母线有功功率不平衡率为48.84%,与巡检结果一致。
3.2 遥信及遥控信息自动巡检
对北庄站和珏山站进行遥信巡检,巡检结果为:北庄站830 分段开关遥信与遥测矛盾;珏山站300分段开关遥信信息与遥测数据互相矛盾。北庄站遥控巡检的软件画面显示,北庄站开关预置全部成功。
4 结束语
针对调度数据庞大,调控人员处理困难等问题,研究了一种调度监控自动巡检系统,并基于现有的自动化主站系统设计实现了相应的巡检软件。通过对自动巡检系统的应用,省去了传统模式下监控员人工从海量告警窗中筛选有用信息的过程,将监控员单次巡检时间由30 min 以上降低至5 min左右,有效减轻了调控人员的工作负荷,提高了对电网“健康”信息全面掌握和管理的水平。
