人工智能在提高无人机自主性上的应用与分析
2020-01-03李富强
李富强
摘 要:围绕人工智能和无人机自主性问题,梳理并分析无人机在自主感知和认知、自主规划和控制、人机交互方面对人工智能的需求以及无人机在自主控制体系结构技术、感知与认知技术、规划与控制技术、协同与交互技术等自主性发展上为人工智能应用打下的基础。以视频大数据分析和无人机僚机为例,介绍人工智能技术在无人机感知和协同规划等自主性提升上的应用情况。最后,分析人工智能在无人机感知与认知、规划与控制、协同与交互上的应用前景。
关键词:人工智能;无人机;自主性
Abstract:Focusing on the issue of artificial intelligence and UAV autonomy,sort out and analyze UAVs demand for artificial intelligence in autonomous perception and cognition,autonomous planning and control,human-computer interaction,and autonomous control architecture technology,perception and cognitive technology,planning and control technology,collaboration and interaction technology and other autonomous developments lay the foundation for artificial intelligence applications. Taking video big data analysis and UAV wingmen as practical application cases,it introduces the application of artificial intelligence technology in autonomous enhancement such as UAV perception and collaborative planning. Finally,analyze the application prospects of artificial intelligence in UAV perception and cognition,planning and control,collaboration and interaction.
Keywords:artificial intelligence;UAV;autonomy
0 引 言
無人机主要是指无人在机上驾驶、可自主控制或遥控的飞机武器系统,它可执行对空、对地(海)作战任务,并具有可回收、可重复使用的特征[1]。无人机以其在“零生命风险”、更强作战能力以及更能适应恶劣作战环境方面的优势,越来越受到各国军事作战部门的关注。相较于其他航空装备,无人机最主要的特点之一便是“无人”,要真正实现这一特点,就需要不断提高其自主性。
人工智能(AI)于1956年被首次提出后,作为研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新科学技术,随着近些年大数据、计算力和深度学习等方面研究的进展,得到了高速发展。目前,美国在第三次“抵消战略”中将人工智能作为核心技术,正大力推进其向军事领域的应用。而无人机在自主性上与人工智能具有极强的契合性,通过人工智能的应用可以在很大程度上提高无人机的自主性。
本文从提高无人机的自主性出发,对人工智能在提高无人机自主性上的相关应用情况和应用前景进行分析。
1 无人机与人工智能
以“自主性”为突出特点的无人机,其作战环境相对于过去已经发生了变化。在过去,无人机大多应用在防空威胁不大的空域,但是随着各国防空武器装备的不断升级,空域竞争加剧,无人机面临的作战环境越来越恶劣。因此,就需要自主性更强的无人机。
1.1 无人机对人工智能的需求
目前,按照对自主性武器系统的要求,无人机要能够基于自身掌握的知识以及对自身和周围动态环境的认知,独立形成多个作战方案,并选择一种合适的作战方案来完成作战目标,而且还必须要具备对非预期战场态势做出响应的能力。无人机在自主性上的升级,面临自主感知与认知、自主规划与控制、人机交互等方面的技术挑战。
1.1.1 自主感知与认知
无人机要能够在未知的复杂环境下进行作战。所谓的未知环境,是指在设计无人机时未考虑的环境。无人机在研发和测试中,使用的是静态的、结构化的环境,而执行任务是在动态的、非结构化的环境中进行,因此就要具备理解、响应和适应复杂多变环境的能力。
1.1.2 自主规划与控制
无人机要想在战场生存并成功完成任务,除了需要具备在复杂多变的环境中能够对各种威胁进行感知、认知、探测、确认和分类的能力,还要具备能够针对这些威胁进行后续任务规划和行动决策的能力。
1.1.3 人机交互
无人机即便具有较高的自主性,但是在未来还是会在人的参与下进行作战。而无人机作战效能的高低取决于特定环境下人机之间的交互。在人机交互中,如何将人确定的作战目标快速有效地传递给无人机,也是无人机在自主性升级上的一大挑战。
1.2 无人机应用人工智能的基础
相较于真正的自主性系统,当前无人机的自主性水平距要求还有很大差距。同时,与其他军用航空设备相比较而言,无人机由于其一直强调发展“自主性”,最具有应用基础。美军在《2009—2034财年综合无人机系统路线图》中提出,计划到2015年实现感知、规避能力,到2034年实现在线态势感知能力[2]。
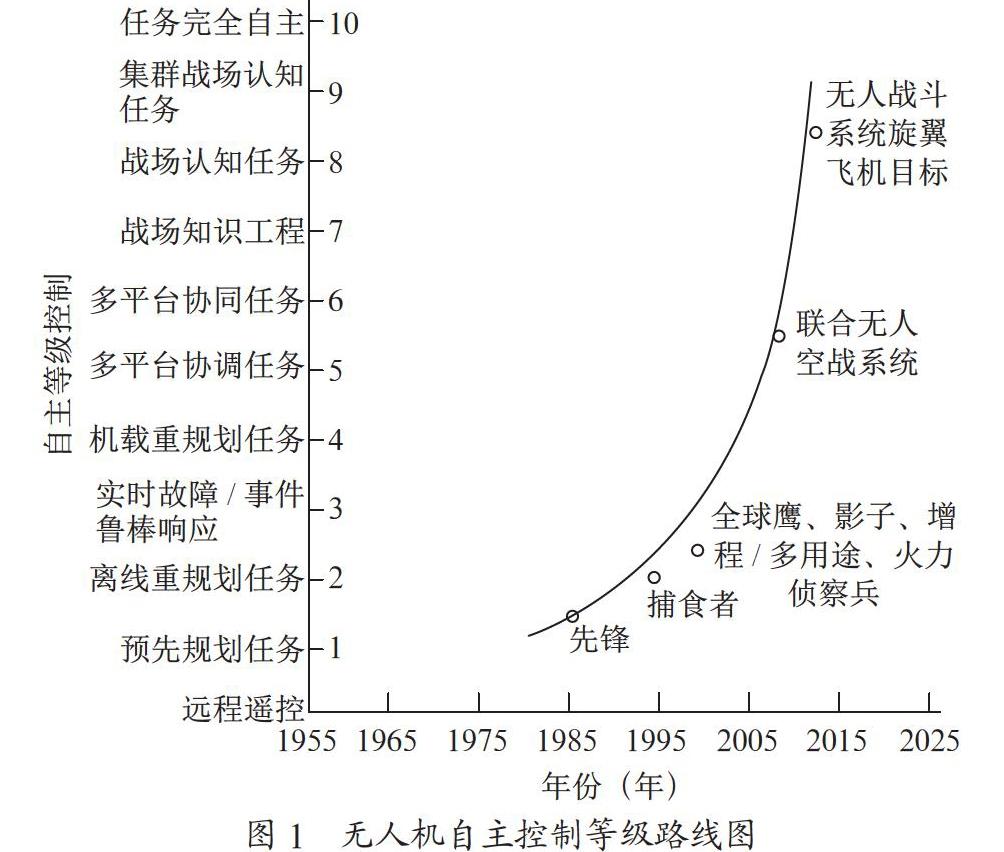
在对无人机过去的研究中,美军就针对无人机的自主性提出了自主控制等级路线图[3],如图1所示。
除了对无人机的自主控制等级进行规划外,也对无人机在自主性上的技术发展方向进行了梳理,即自主控制体系结构技术、感知与认知技术、规划与控制技术、协同与交互技术方向[4]。
2 人工智能的应用与分析
无人机的自主性发展规划最早、最完善,在自主性提高上,对寻求人工智能技术的帮助进行了有益的研究和探索,如无人机视频数据分析等。
2.1 实际应用案例
由于无人机自身所具备的自主性特征以及对自主性升级的需求,使得人工智能能够很好地与无人机相契合,从而为无人机应用人工智能提供了基础。目前,美国在这方面不仅进行了有益探索,而且还对人工智能在提高无人机自主性上进行了工程应用。从目前的情况来看,应用人工智能的案例主要有视频大数据分析和无人僚机等。
2.1.1 视频大数据分析
目前,无人机的一大主要军事用途就是侦察,这些无人机在侦察过程中获得了海量的视频数据,以美军的无人机为例,每年无人机的飞行小时数就多达50万小时。要对这些数据进行分析,需要耗费大量的人力和时间。因此,美军在2017年启动了利用人工智能对视频大数据进行分析的项目——“行家项目”(Project Maven)。
2.1.1.1 应用方向
在该项目中,视频分析人员主要想通过人工智能获得视频数据在五个方面的应用,即反向图像搜索、目标数量快速计算、目标数量持续计算、选择及跟踪、事件标注。
(1)反向图像搜索。视频数据分析人员看到其关注区域中出现的车辆后对其进行截图拍照,人工智能算法将所拍图像同历史记录图像进行对比,然后给出相似车辆的相关视频记录。
(2)目標数量快速计算。视频分析人员在所关注目标周围绘制边界框图,人工智能算法对框图内的所有目标进行分类并计算。
(3)目标数量持续计算。视频分析人员在所关注目标周围绘制边界框图,通过人工智能算法持续计算框图中一段时间内的目标数量,然后由人工智能算法以图表的形式给出一段时间内框图中的目标分类及其数量变化情况。
(4)选择及跟踪。视频分析人员在视频数据中对移动目标进行标注,然后通过制图工具自动在地图上生成移动物体的历史移动路径。
(5)事件标注。分析人员在某事件发生后,对代表性物体或目标进行标注。通过这些标注数据训练算法,使其在后续使用中能够通过识别物体或目标的方式,来识别出某事件的发生。
2.1.1.2 开发流程
“行家项目”是由美国国防部“算法战跨职能小组”(AWCFT)负责。该小组在将人工智能应用于视频数据分析上主要分为三个步骤,即数据采集、处理与标注,算法开发,算法综合。
(1)数据采集、处理与标注。首先获取无人机拍摄的视频数据,对这些数据进行人工随机审核;然后对数据进行标注;最后生成经过标注的数据。
(2)算法开发。在算法开发上,综合GPU资源、云计算、商用算法、开源算法和数据、军方需求,使用经过标注的数据进行算法训练,获得初始模型及改进后的模型,然后再通过对算法的测试、评估来提高算法的准确度。
(3)算法综合。算法综合就是指将训练后获得的算法模型综合到无人机上,具体涉及到算法加载、传感器校准、软件修改、地面测试、试飞、最终综合测试、认证等步骤。算法综合到无人机并投入最终的外场使用后,还要记录使用过程中发现的错误,提交错误报告,进行算法再训练、再综合。
2.1.2 无人僚机
2016年6月,由美国辛辛那提大学与美国空军联合研发的空战人工智能系统阿尔法AI在模拟空战中100%击败了美国空军退役上校基恩·李。在该模拟空战中,由阿尔法AI控制的红方飞机击败了基恩·李控制的蓝方飞机,展现了人工智能的优势。
阿尔法AI对于无人机来说,可以帮助其成为无人僚机,协同有人机作战。美国空军研究实验室在提出“忠诚僚机”概念后,就计划研制一种人工智能模块,从而实现无人驾驶的F-16和F-35之间的搭配。
阿尔法AI在空战领域所体现出的强大的人工智能威力,主要得益于其采用了人工智能算法以及在算法上的创新。
2.1.2.1 阿尔法AI算法
阿尔法AI采用的人工智能算法是遗传模糊树(GFTs)模型。该模型基于遗传模糊系统和模糊树,不仅通过遗传算法来训练模糊系统中的所有规则,而且还通过构建模糊树来减少需要训练的规则数量。阿尔法AI具体用到的模型被称作学习增强战术处理算法(LETHA)。
2.1.2.2 算法的优点
阿尔法AI在遗传模糊树算法上的创新,使其具有三方面的优点:
(1)经过优化,更易在低配置计算机上运行。遗传模糊树算法将大型模糊逻辑问题拆散成了许多个小型模糊逻辑问题,同时还保留了原问题中多输入量之间的关系。
(2)运算速度更快,实用性更强。如果让机器在做出决策前就处理所有可用的数据,就会增加运算量、减慢处理速度、降低系统实用性,阿尔法AI通过简化变量,只考虑最相关的信息,避免了这些问题的出现。
(3)降低了对计算能力的需求。阿尔法AI所采用的算法是基于语言或“模糊逻辑”,通过if-then规则做出的,这样就减少了决策树的分支机构数量,降低了对计算能力的需求。
2.2 应用前景分析
目前,人工智能是最有希望提高无人机自主性的技术途径。人工智能与自主性的契合会随着人工智能技术的不断发展更加深入。就无人机而言,与其自主性相关的方面主要包括感知与认知、规划与控制、协同与交互[4]。
