基于GNSS三维测量的河床空间信息一站式获取技术
2020-01-03张振军
张振军,杨 松,杨 建
(长江水利委员会水文局汉江水文水资源勘测局,湖北襄阳441200)
0 引 言
目前,常用的河床空间信息的获取方法为应用GNSS动态测量技术、测深仪及其他附属设备实测的数据,通过实时或事后联合解算,计算出测深仪换能器声学中心的三维位置,从而获得水下测点的平面位置和高程。该方法也被称作GNSS三维水道测量、无验潮测深、随船一体化测深等[1]。此项技术的关键为河流保护区内似大地水准面精化模型的构建及水面高数据提取滤波方法的实现。郑伟等在GPS-RTK三维水下地形测量的应用与误差分析文中采用分区常数法进行高程异常改正[2];李昱等在基于JSCORS与似大地水准面精化模型的RTK三维水深测量研究中,采用分段二次曲面与BP神经网络拟合算法建立似大地水准面精化模型,并利用该模型换算测深点高程数据文件[3];冯国正等在EGM2008模型的无验潮测深技术中,应用少量控制点修正EGM2008系统偏差,将EGM2008应用于无验潮测深[4]。
本文应用移去-拟合-恢复技术,以EGM2008地球重力场模型为参考重力场,融合河流保护区内高精度GNSS/水准数据,构建高分辨率和高精度的似大地水准面。采用定位质量剔除法,保证GNSS三维定位原始数据的质量;应用数据平均误差阙值法,平滑掉水面高的高频部分,保留反应水位变化过程的低频部分;最终通过2次滤波,提取高精度的水面高数据。经精度测试,似大地水准面精化模型误差和测深精度均达到厘米级,并开发了河床空间信息一站式获取软件,形成了GNSS三维水道测量的内外业无缝工作流,实现了实时、高效、高精度的GNSS三维水深测量。
1 河床空间信息一站式获取技术原理
河床空间信息一站式获取技术原理见图1。图中,H表示GNSS天线相位中心至WGS84参考椭球面的高度,即GNSS天线相位中心的大地高;L为GNSS天线相位中心到静态水面的高度;h为河道底边界到似大地水准面的高度,即河床测点的正常高;d为换能器声学中心至静态水面的距离,即船舶静吃水;S为换能器声学中心到河床底部的距离;§为似大地水准面至WGS84参考椭球面的距离,即高程异常;T为船舶静态水面到似大地水准面的距离,即测时水位。

图1 河床空间信息一站式获取原理
由图1可以得到
h=T-(S+d)
(1)
T=H-§-L
(2)
h=(H-§)-L-(S+d)
(3)
若区域似大地水准面为1985国家高程基准面时,即H-§=H85。其中,H85为GNSS天线相位中心至1985国家高程基准面的正常高,则
h=H85-L-(S+d)
(4)
此时,水深S由单波束测深仪实时测得;d+L为固定值,其中,d可由钢卷尺丈量,L可由钢卷尺丈量船舶静态水面至天线高量取位置的距离结合GNSS天线参数获取。若GNSS三维动态测量采集到1985国家高程基准面上的高程,便可实时一站式获得河床空间信息[2]。
2 技术实例
本文以汉江丹江口至宜城河段固定断面测量项目为例,河段全长约159 km,横向测量范围为河流保护区内,进行河床空间信息一站式获取技术试验研究。定位系统采用网络RTK系统;平面坐标系统采用1954年北京坐标系;高程基准采用1985国家高程基准;GNSS接收机采用Trimble R10;测深仪采用无锡海鹰HY1601型测深仪;导航软件采用Hypack。基于GNSS三维测量的河床空间信息一站式获取技术的关键为河流保护区内似大地水准面精化模型的构建,由此得到测时水位的正常高,以及水面高数据提取滤波方法的实现。
2.1 似大地水准面精化模型的构建
采用移去-拟合-恢复技术,通过河流保护区内的GNSS/水准联测点数据[5],参考地球重力场模型EGM2008,运用克里金、反距离权重、样条函数等经典数学插值法,基于网格修正技术构建高精度、高分辨率的似大地水准面精化模型。模型构建技术流程见图2。

图2 似大地水准面精化模型构建技术流程
在汉江丹江口至宜城河段河流保护区范围内,布设有D级GNSS控制网,所有GNSS控制网点均联测了四等水准,共计97个GNSS/水准联测点,选取其中均匀分布的50点作为已知点,应用克里金、反距离权重、样条函数及趋势面法等数学插值法进行高程异常差值网格模型构建,分别对修正后的河流保护区内地球重力场模型按下式进行内符合和外符合精度验证,即
(5)
(6)
式中,σi为模型的内符合精度;Δεi为转换残差;n为参与建模点个数;σe为模型的外符合精度;Δεe为检验点计算值与真值之差;m为检验模型点个数[6- 8]。
根据验证的结果,最终选定样条函数法作为高程异常差值的拟合方法,应用高程异常差值网格模型及河流保护区内的EGM2008模型进行栅格代数运算,得到修正后的汉江丹江口至宜城河段河流保护区内地球重力场模型。模型的内符合精度为0.002 m,外符合精度为0.013 m,能有效满足测时水位正常高实时获取的精度要求。经网格修正后的汉江丹江口至宜城河段河流保护区地球重力场模型示意见图3。
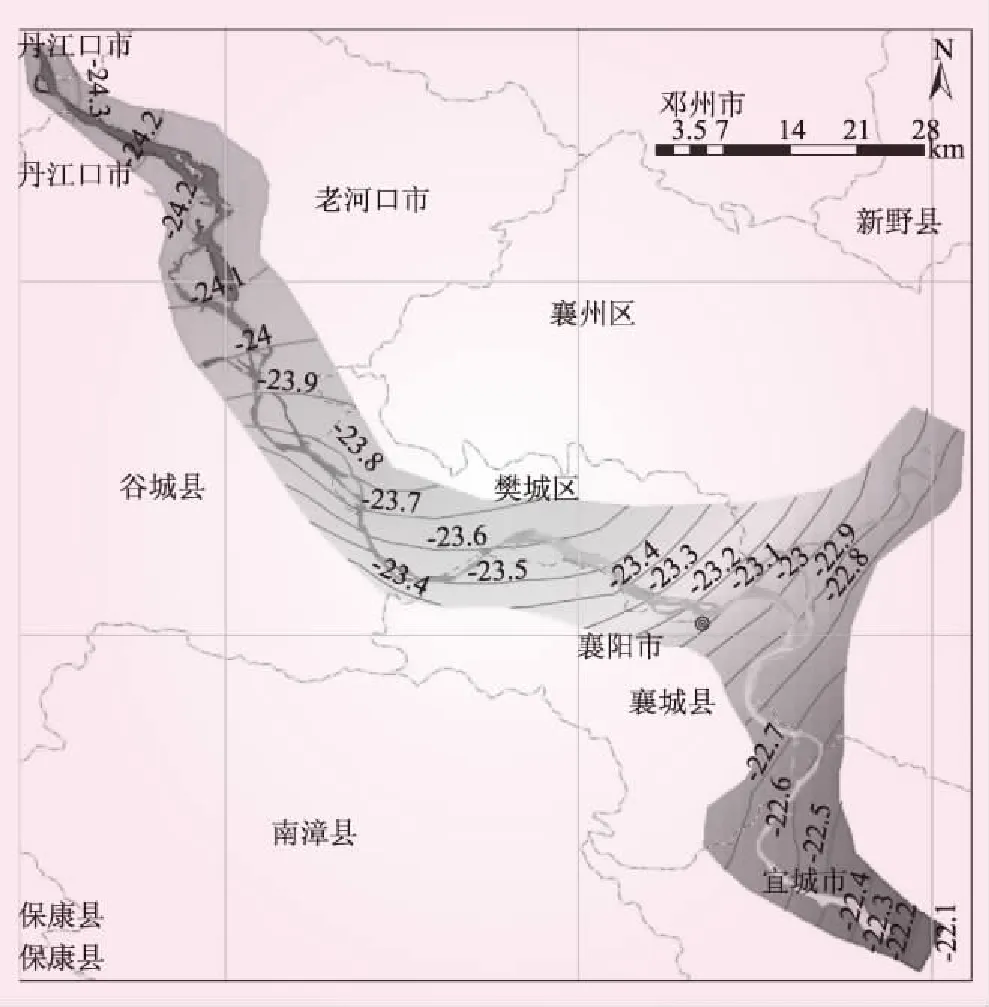
图3 修正后测区地球重力场模型
2.2 水面高提取方法
本次测量的河床空间信息一站式获取系统由Trimble R10 GNSS接收机、HY1601测深仪及Hypack导航软件组成。数据采集时,GNSS数据更新率设置为10 Hz,测深仪更新频率默认为20 Hz,输出并记录GGA格式数据。同步采集的数据包括定位和测深数据。Hypack软件采集的原始数据结构见表1、2、3[9]。
在对Hypack软件采集的原始数据进行数据结构分析的基础上,通过分析定标时刻附近的卫星质量情况,对原始数据进行第1次滤波处理,即过滤掉卫星个数小于等于5和GNSS定位为非差分定位等情况,充分保证GNSS三维定位原始数据的质量。软件实现界面见图4。
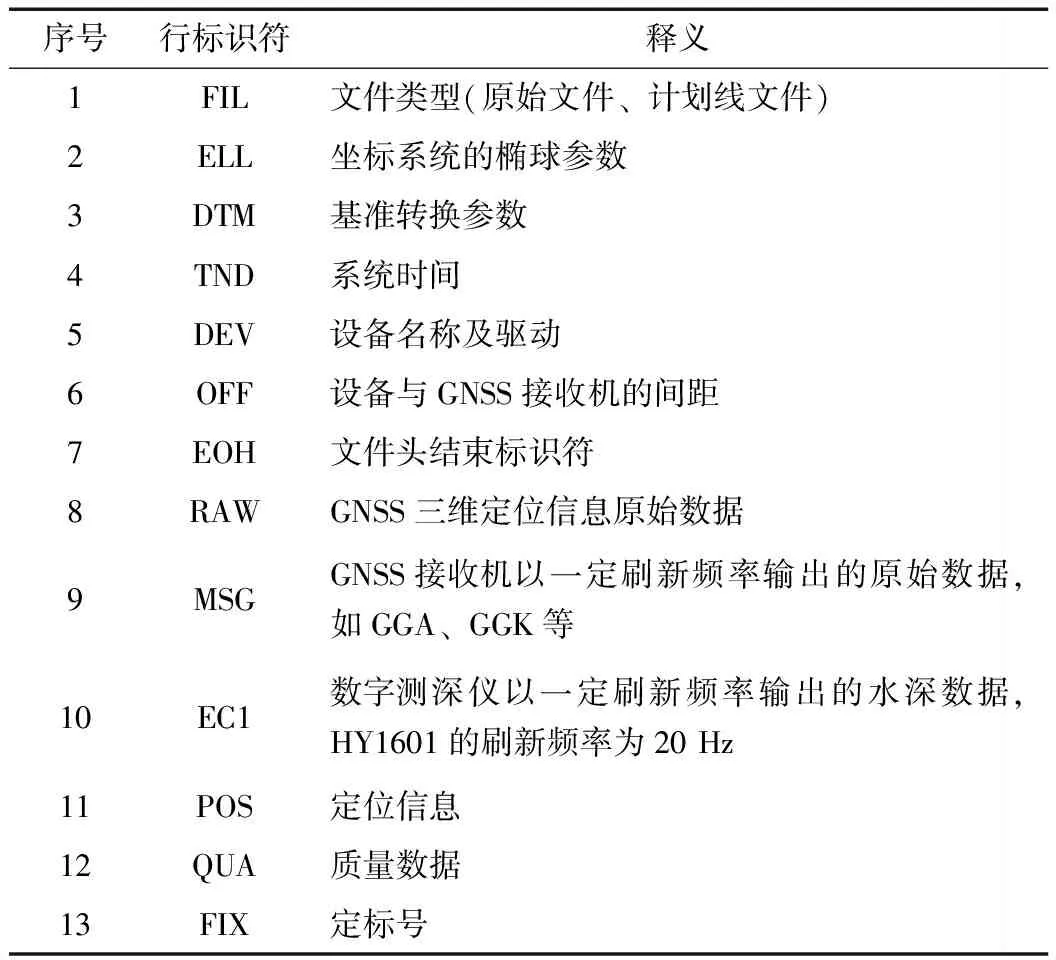
表1 部分行标识符释义
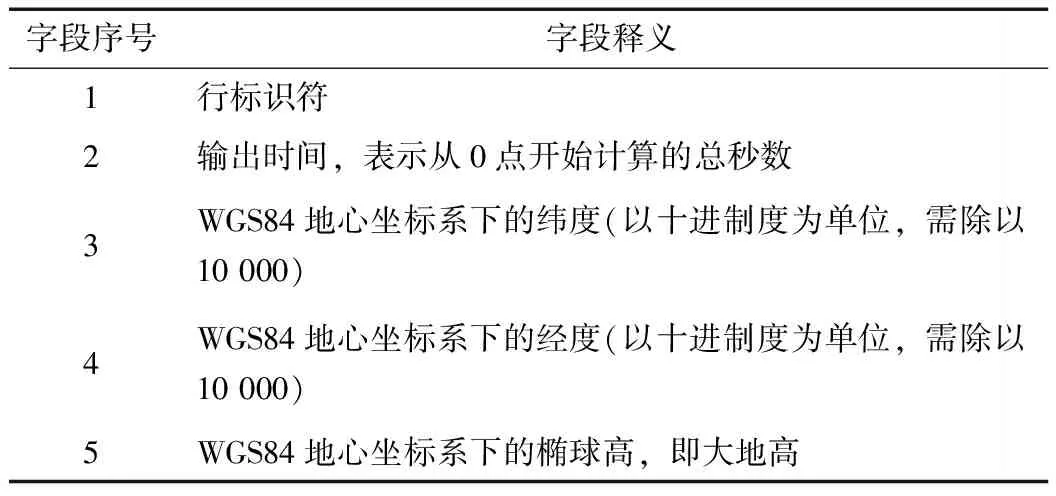
表2 GNSS三维定位信息原始数据(RAW)字段释义
在对原始数据进行第1次滤波处理后,应用数据平均误差阙值法平滑掉水面高的高频部分,保留反应水位变化过程的低频部分,最终通过2次滤波,提取高精度的水面高数据,第2次滤波的软件实现界面见图5。
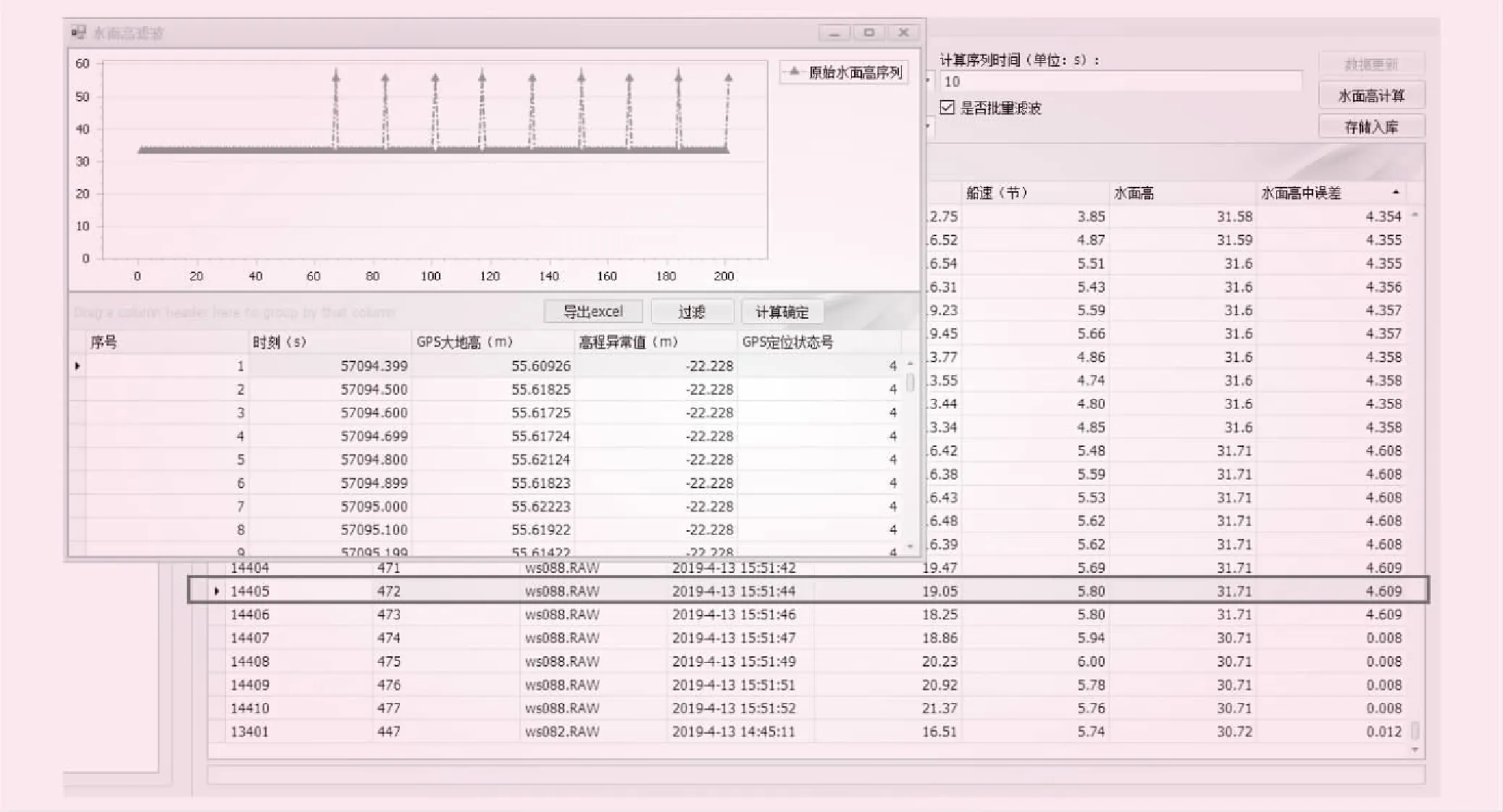
图4 原始数据的第1次滤波实现

图5 原始数据的第2次滤波实现
2.3 系统检核精度评价
为了验证评价河床空间信息一站式获取成果的精度和可靠性,本项目在采用网络RTK测量模式测深时,同时采用测区河段本单位布设的基本水文(水位站)、全站仪光电测距三角高程测量等方式测量部分区域水深[10]。经过数据处理,比对相同测点的测时水位,共比对点数825个,中误差为0.06 m,比对互差不大于0.1 m的点数占比对总点数的99.5%,满足相关规范要求。测时水位与水面高的误差分布见图6。

图6 测时水位与水面高的误差分布
3 结 语
本文针对GNSS三维测量的河床空间信息一站式获取技术的关键点,通过汉江丹江口至宜城河段固定断面测量项目,采用移去-拟合-恢复技术,以EGM2008地球重力场模型为参考重力场,融合河流保护区内高精度GNSS/水准数据,构建了高分辨率和高精度的似大地水准面精化模型。通过定位质量剔除法,保证GNSS三维定位原始数据的质量,应用数据平均误差阙值法平滑掉水面高的高频部分,保留反应水位变化过程的低频部分,最终通过2次滤波,提取高精度的水面高数据。经精度测试,似大地水准面精化模型误差和测深精度均达到厘米级,并开发了河床空间信息一站式获取软件,形成了GNSS三维水道测量的内外业无缝工作流,实现了实时、高效、高精度的GNSS三维水深测量。此技术的研发推广可有效提升河道勘测生产工效,还可在复杂水域有效提升成果质量。
