移动式三维激光扫描仪在地下管廊测量中的应用
2020-01-03檀继猛张鹏飞邵士成刘秀涵
檀继猛,张鹏飞,邵士成,刘秀涵
(1. 济南市勘察测绘研究院,山东 济南 250013; 2. 北京麦格天渱科技发展有限公司,北京 100043)
近年来,随着中国经济的快速发展及智慧城市的建设,我国城市地下的开发利用已经达到了空前的规模[1-2]。为了实现对城市地下管网的可视、可管、可控,需要利用数字化测量手段对城市地下管线数据进行普查测绘,逐步实现对城市地下管网的智能化监控[3]。
近几年备受关注的三维激光扫描技术突破了传统测量中单点测量的模式,能够快速获取物体表面的三维点云数据,具有高效率、高精度、非接触式主动测量等优势[4-7]。本文采用基于SLAM技术的移动式三维激光扫描仪对地下管廊进行测量,利用Trimble Realworks软件对管线数据进行后处理,分类提取管道的特征点数据,最后辅以全站仪常规测量手段对其精度进行可靠性验证。
1 测区概况
测区位于山东省济南市福地街旁某地块,应业主要求进行地下管线测量工作,由于地形复杂、资料不全等原因,地下综合管廊的地理信息数据基本没有,在实地调查中发现管廊中包含电力、电信、给水、热力等管线,且管廊一端连通排污管沟,污水遍布,气味难闻,常规设备如GPS、全站仪等无法进行使用,而且测绘人员无法在其中久待,如果采用物探设备勘测,因资料缺乏,排水沟的走势方向都不清楚,无法高效作业且精度不高,容易错测漏测,采用开挖方式成本又太高。基于此种现状,决定采用移动式三维激光扫描仪进行外业数据采集,以最大限度地呈现管廊的现状。
2 移动式三维激光扫描
2.1 GEOSLAM ZEB-REVO移动扫描仪
ZEB-REVO采用手持移动扫描的方式便可实现对小空间及大空间进行高精度高效率的扫描作业,打破了传统移动扫描观念。在作业过程中便可实时自动处理扫描数据,使得管线测量工作更轻量化和简单化,为地下空间、矿山巷道等方面提供最有效的解决方案。
2.2 控制测量
为了使三维激光扫描仪的成果与工程所需坐标基准一致,需要在地下管廊所处位置的地面布设足够密度和精度的控制点,结合实地地形条件和地下管廊的位置情况,本次扫描采用基于目标的配准方案,控制点分两组布设,分别位于地下管廊起始两端的地面位置,控制点需要保证空旷且与地下管廊有联通,控制点呈锐角三角形分布,点间距离至少10 m。本次控制点布设采用了济南市CORS网络RTK进行控制测量,外业扫描前,在控制点上架设球形标靶。如图1所示,共布设6个控制点,其中C1、C2、C3布设在地下管廊出口位置附近地面,C4、C5、C6布设在地下管沟起始位置所在地面。
2.3 扫描作业
为了保证扫描作业的顺利进行,必须在扫描前对地下管廊进行现场踏勘,确定扫描路线。在线性扫描环境中,通常采用多任务全局拼接的方法,选择特征点较多的区段作为前后两次扫描任务的拼接控制区,通过控制区将点云“首尾相连”地拼接起来。
选择合适的单次扫描距离是保证扫描质量的关键。考虑到本次需扫描的地下管廊长度在200 m左右,为了满足测量的精度要求,需要将每次扫描时间控制在15 min以内,故将本次扫描工作分为8次扫描任务,根据地下管廊现场环境确定前后两次扫描重合区域,保证两次扫描具有一定的扫描重叠度,根据笔者扫描经验,扫描重叠区域需要保证15~20 m。
3 数据的处理与应用
3.1 点云配准
采用分段扫描时,每次扫描任务所获取的点云属于不同的参考坐标系,因此需要将多次扫描的点云进行配准,并转换到统一的坐标系统中,从而将点云拼接成一个三维整体的过程,这就是点云的配准[8]。常用的点云配准方法包括基于点云的配准和基于目标的配准。
基于点云的配准方法即根据同名特征(重叠扫描区域)三维信息的ICP配准法,根据点间距平方和最小的原则,对两次扫描过程中重叠扫描的点进行不断迭代,寻求最佳转换矩阵,实现点云配准[9-10];对点云进行配准后,可对配准结果进行质量检查,以3 cm为误差限值,配准重叠率至少70%,若超过限值则需要重新配准,直至满足精度要求。
基于目标的配准方法是在测区布设多个标靶,通过扫描仪获取至少3个标靶的点云信息,扫描完成后通过拟合标靶处三维点云的中心点作为扫描标靶的中心,对其赋予实际坐标,即可完成点云配准,实现地理坐标转换。配准后的地下管廊点云如图2所示。
3.2 数据去噪
在对地下管廊中的扫描过程中,不可避免地会将地面堆积物、电缆等不必要的信息包含在点云内部,这将会对点云的配准精度、可视化及三维建模产生影响,因此需要对原始数据进行优化。
利用Trimble Realworks软件对配准重合区域进行单点少量去噪,增加点云配准精度;运用软件的区域分割功能,将多余的无意义的扫描数据进行剪切剔除,增加点云的可视化效果;对需要建模的区域则采取单点少量去噪,剔除地下管道周边的噪点,以便对管道进行三维建模。
3.3 数据重采样
由于采取分段扫描的模式获取数据,相邻两次扫描任务之间有一部分重叠区域,在数据拼接过程中会造成数据冗沉,影响作业效率,因此有必要在不影响数据精度的情况下,对点云进行重采样。利用Trimble Realworks软件中“取样”工具,根据测区情况和点云的完整情况选择取样模式,设置某一取样阈值,经过重采样后生成新的点云数据。
本次数据重采样采用基于空间的取样模式,选择10 mm的采样间距,经过重采样处理,既保留了原有地下管廊及管道的结构特征,又消减了数据存储空间,提高了作业效率。
3.4 分类提取
根据项目总体需求,在点云模型的基础上需要对地下管廊中的管线特征点进行分类提取,生成带有地下管线属性和空间位置的数据。对地下管廊内部的管线进行分类,以“高度阶化色彩”渲染显示点云,使得不同位置的管线更易于区分,再对不同管线进行分类标注。如图3所示,采用Trimble Realworks软件的“特征集”功能提取管线点数据,根据管线种类建立特征集数据库,新建管线特征码,对不同管线特征点进行分类提取。管线数据成果以ASC格式进行输出,通过更改文件格式导入CASS软件或EPS软件中绘制管线图。
3.5 精度分析
为了验证该方法结果的可靠性,利用全站仪选取部分地面验证点进行验证。三维激光扫描仪采集得到的点云中拾取验证点的坐标数据,并与全站仪测量数据进行比对,特征点坐标对比结果见表1,其中序号1、10为控制点处的球靶中心点,序号2、3为地下管廊北出口与地面连接处的明显特征点,序号4、5、6、7、8、9均为地下管廊与地面连接的竖井的井盖中心点。
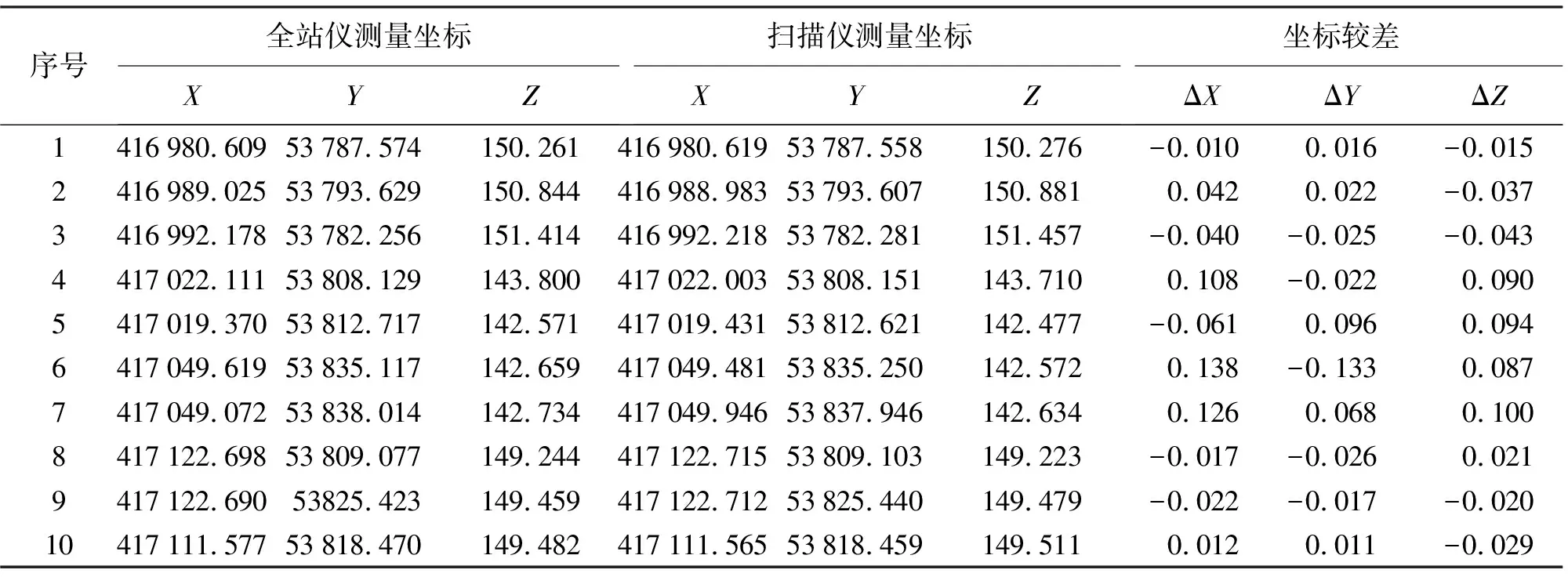
表1 全站仪与三维激光扫描仪测量点位坐标对比
注:因数据保密需要,表中坐标已进行加密处理。
由表中数据可知:验证点在X方向上的坐标较差的最小值为0.01 m,最大值为0.138 m;Y方向上的坐标较差的最小值为0.011 m,最大值为0.133 m;Z方向上的坐标较差的最小值为0.01 m,最大值为0.1 m,满足本次工程的测量精度要求。
4 结 语
本文利用移动式三维激光扫描技术和传统测量方法对地下管廊测量进行了对比试验研究,研究结果表明:移动式三维激光扫描技术具有全站仪无可比拟的优势,能够全面地反映管线的表面特征,解决了传统方法在地下管廊测量中的不足,不仅保证了测量精度,而且大大提高了作业效率。本文通过实际项目对移动式三维激光扫描技术应用于地下管线测量进行了研究,为今后的城市地下空间测绘提供了作业依据,也推动了移动式三维激光扫描技术在工程测量、古文物保护、三维数字城市建设等领域的应用。
