旋翼无人机测算风速风向技术研究
2020-01-03吕振义舒立福
何 诚,吕振义,李 瑾,王 越,舒立福
(1. 南京森林警察学院侦查学院,江苏 南京 210023; 2. 深圳市科卫泰实业发展有限公司,广东 深圳 518101; 3. 中国林业科学研究院森林生态环境与保护研究所,北京 100091)
随着科技发展及无人机技术的普及,无人机应用的行业越发广泛,包括公安侦查、森林资源调查、森林火灾扑救、电力巡检、抢险救灾、广告宣传等方面。空中风向风速的探测对掌握大气层运动状态具有重要意义,在特定场景下,如森林火灾扑救指挥现场、抗险救灾指挥现场等,风速风向信息的获取,直接影响扑救指挥作战方案;实时掌握风场信息,也是预测天气变化的重要数据支撑,尤其在山谷海拔落差大的小气候环境,掌握风场信息显得风更迫切,然而目前大部分民用无人机都不具备测量风场参数的功能[1-3]。目前测量高空风速的主要方法包括风廓线雷达测风法、气球法测风法和利用卫星根据云图上云的运动推算风向和风速[4-6]。风廓线雷达探测某一特定区域的风场情况虽然精度高,但受天气情况影响很大;目前测量小范围风向风速精度最高的方法为气球法测风法,但其成本相对昂贵且测量范围小;利用卫星根据云图上云的运动推算风向和风速的方法,因云的水平分布和铅直分布都不均匀,所以其测量精度得不到保障[6]。
国内外一些学者专家,也从不同角度提出无人机测量风场的一些方法,包括水平空速归零法[7]、航位推算法[8]、皮托-静压管测风法[9];上述几种无人机测量风速的方法,虽从理论上都具有一定的创新性和实用性,但使用环境受到局限,测量过程中,要求无人机在水平面内盘旋飞行,不适合落差大高海拔等复杂地形环境,也满足不了大区域执行探测任务,后处理流程烦琐且工作量大,满足不了实时测量风场信息的需求。为了满足高海拔落差大等复杂环境下风场信息实时探测需求,本文提出一种基于旋翼无人机螺旋桨坐标信息的测算风速风向技术,并对其方法进行研究,并对其测量精度进行检测,进而探索一种可行的高精度的无人机测风方法。
1 材料与方法
1.1 测试无人机性能简介
本文使用测试的无人机有两款,分别为KWT-X6M与KWT-X6L系列,如图1所示,性能参数如下:两款无人机都为全碳纤维机身,动能为锂电池供电,在500 g载荷飞行时间大于60 min,上翘机臂设计,增加了飞行平稳性,抗风能力大于7级,可在海拔5 km以上地区飞行,智能飞控系统,支持手动精准操控及自主飞行模式,RTK机型高抗磁干扰,高精度定位,GPS悬停精度垂直方向为1.5 cm,水平方向为2 mm,遥控器最大控制距离为7 km(取决于当地电磁环境),地面站最大控制距离为10 km(取决于当地电磁环境),全高清实时传输,支持HD1080i/p图像,支持变焦、热成像、广角等多种云台;KWT-X6M型号无人机电机轴距:955±10 mm,最大翼展:1412±20 mm,标准起飞重量:10±0.2 kg;KWT-X6L型号无人机电机轴距:1600±10 mm,最大翼展:2323±20 mm,标准起飞重量:11.5±0.2 kg。
1.2 无人机螺旋桨坐标信息获取
无人机主体上装有RTK(real time kinematic)定位系统,可以实时获取主机的三维坐标信息,在六旋翼无人电动直升机的6个旋翼上安装相对于无人机主体机器(简称为主机)方位角测量装备(可以测量出螺旋桨方位角及倾角),结合主机三维坐标信息、螺旋桨的方位角与倾角数据,由三角函数原理推算出6个螺旋桨的坐标,进而可以根据螺旋桨的坐标信息,计算出旋翼无人机的整体倾角,推算原理如下:
设主机坐标为(x,y,z),各个螺旋桨坐标信息为(xi,yi,zi),其中主体坐标由RTK自动获取,而螺旋桨坐标信息计算方法为
(1)
式中,s为螺旋桨与主机RTK的距离;θi为方位角;αi为倾角。
1.3 试验方法
测试时间为2019年8月5—6日,测试地点为深圳市宝安区恒丰工业园C3楼楼顶,天气晴,风速3~4 m/s,气温30~32℃,测试机型为KWT-X6M与KWT-X6L,测试所用航线如图2所示,飞行高度50 m。试验分组如下:①KWT-X6M无人机50 m高度飞行时速度和机身倾角对应关系(对照测试组:空机飞行、挂载648 g云台飞行);②KWT-X6L无人机50 m高度飞行时速度和机身倾角对应关系(对照测试组:空机飞行、挂载648 g云台飞行);③KWT-X6L无人机挂标准载荷(648 g云台)飞行时机身倾角和速度的对应关系(对照测试组:50 m高度飞行、100 m高度飞行)。设定好试验方法后,用地面站航点飞行方式控制无人机在不同高度,设置不同载荷时以1、2、3、4、5、6、7、8、9、10、11、12、13、14、15 m/s的飞行速度分别完成顺风、逆风往返飞行(速度稳定后保持20 s执行下一个飞行计划),如无风状态下同样速度正南正北各飞一次后取平均值以降低环境风对测试结果的影响。
1.4 风场与飞机运动影响效应原理分析[10-11]
动量守恒定律是指如果一个系统不受外力,或所受外力的矢量和为零,那么这个系统的总动量则保持不变。动量守恒定律是自然界中最普遍的守恒定律之一,它既适用于宏观物体,也适用于微观粒子;既适用于低速运动物体,也适用于高速运动物体;它既适用于保守系统,也适用于非保守系统。应用流体力学中定性各种机械能的守恒与转换关系,根据运动参考系的定义,当本文中提出的测风无人机与风各自作为参考坐标系,运用牛顿运动力学作为解释。当以静止风作为参考坐标时,匀速飞行的飞机可以定义为相对于静止风,以一个固定的速度在运动;而当把匀速飞行的飞机为静止参考坐标系时,可以认为风往飞机飞行方向与飞机同速的风速在吹动。因此在此参考系下,原则上要求无人机需匀速朝向一个固定方向飞行,可以实现风速与飞行速度的相互定义。而实际测量过程中,一是绝对无风状态下的概率偏小,可能会伴有阵风的出现;二是飞行无人机保持决定的匀速状态的难度很大;三是当无人机测量风速时,也会出现风速和风向的波动转化,上述原因皆可能让测量数据出现误差[12-14]。当风场与飞机运动影响效应在有风的状态下进行时,试验在保证无人机飞行方向与风向垂直的情况下,可简单将飞行的无人机定义为顺风飞行和逆风飞行,根据牛顿定律中的相对运动定律,在有风状态下,将匀速运动的无人机作为静止参考系来衡量风速情况,可以用下述公式进行计算:①无人机逆风飞行状态:V=ν机+ν风;②无人机顺风飞行状态:V=ν机-ν风。式中,V为模拟无人机匀速飞行状态情境下,以飞行无人机作为静止参考系,无人机所承受的风速;ν机为无人机匀速飞行速度;ν风为试验过程中实际的风速。
2 结果与分析
通过图2 KWT-X6系列无人机不同条件下飞行速度与飞机倾角的关系可得,无人机匀速飞行速度与无人机的飞机倾角呈正相关关系,无风状态的飞行速度与飞机倾角呈线性关系,逆风飞行的无人机倾角大于无风和顺风无人机飞行倾角,说明风速直接影响无人机的倾角。在图2逆风和顺风飞行试验过程中,出现飞行速度与飞机倾角数据曲线不平滑现象,原因是无人机在飞行过程中,空中气流不稳定,可能有阵风或乱流的出现,导致部分数据出现跳动,进而导致误差的出现。
图3—图6分别展示了风速干扰下不同载重无人机与飞机倾角响应关系、顺逆风干扰与飞机倾角相应关系、两种系列不同类型无人机在风速干扰下与飞机倾角的响应关系、无人机飞行不同高度在风速干扰下与飞机倾角的响应关系,通过数据分析可得:①21寸桨X6M型号无人机飞行速度与重量的对应关系如图5所示,当风速在5 m/s以下时,空负载无人机之间的迎风倾角差异性不大,当风速在5 m/s以上时,对应的迎风状态下无人机倾角相对于空载迎风无人机飞行倾角会相对减小,由此可得,无人机负载加重时,对应受风速干扰的倾角会相对减小。②图4数据响应了牛顿定律中的相对运动定律,无论无人机为顺风飞行测试还是逆风飞行测试,从将无人机飞行速度转换成风速的数据上来看,顺逆风干扰对飞机姿态倾角对应同等受力情况数据相同。③图5展示了KWT-X6M与KWT-X6L 2种系列无人机在相同风速干扰下与飞机倾角的响应关系。通过数据分析可得,KWT-X6L在风速干扰下飞机倾角小于KWT-X6M,从其结构条件下分析,KWT-X6L型号无人机标准起飞重量为11.5±0.2 kg,KWT-X6M型号无人机标准起飞重量为10±0.2 kg;KWT-X6L型号无人机电机轴距为1600±10 mm,KWT-X6M型号无人机电机轴距为955±10 mm。由此可得,无人机外形上体积与自重偏大的无人机,受风速干扰下飞机倾角幅度,小于外形上体积与自重偏小型号的无人机。④图6数据表明,相同风速条件下,海拔对无人机飞行倾角与风速之间的响应关系没有影响,展示了具有风速干扰下无人机飞行高度与飞机倾角的响应关系,高海拔区域因出现阵风的概率,大于低海拔区域,因此无人机飞行受阵风干扰出现噪点的概率相对低海拔大一点。
将KWT-X6M型号无人机在空载无风高50 m的条件下进行测试飞行,通过无人机飞行角度与风速之间的关系,结合牛顿定律、相对运动定律等相关理论,多次飞行取平均值,在保证数据精度的条件下,建立KWT-X6M型号六旋翼无人机飞行倾角的风速估算模型,可得
y=-1.043 5+1.150 1x
(2)

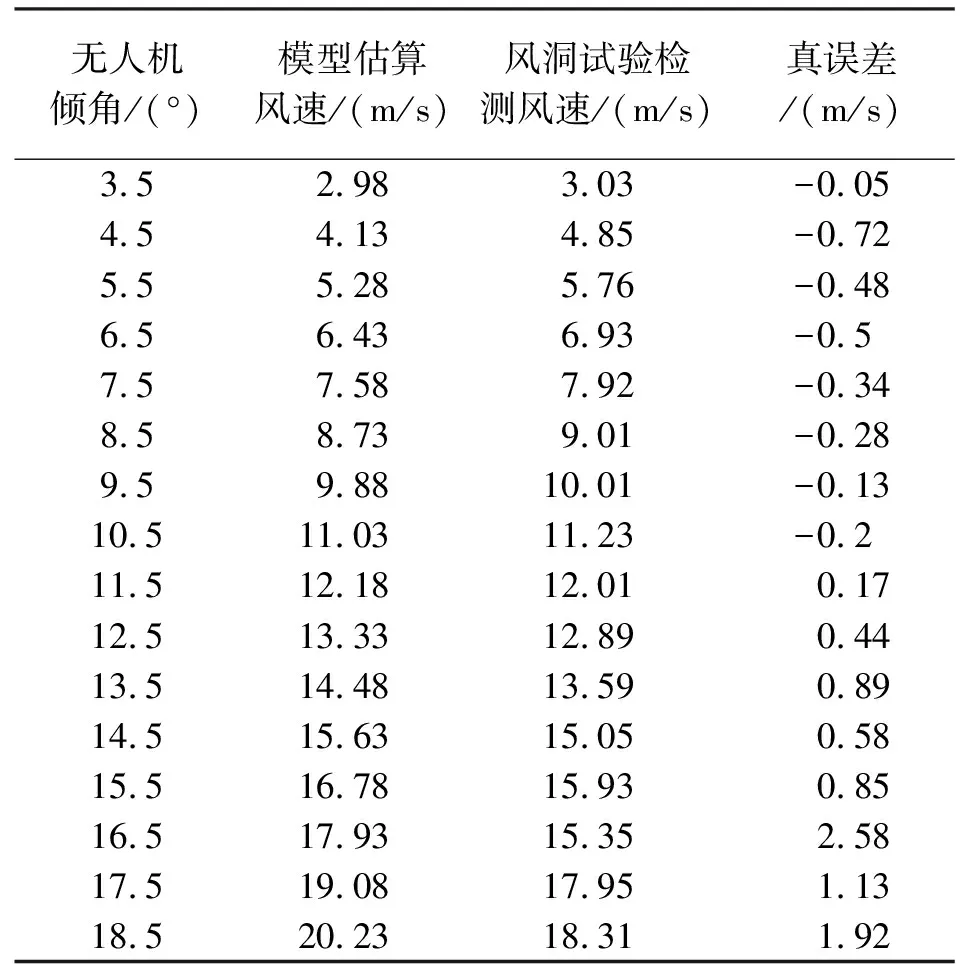
表1 无人机倾角测算风速模型真误差分析
3 结 语
本文结合测绘学坐标数据,利用牛顿定律相对运动定律,在分析了影响风速测量的主要因素后,根据旋翼无人机RTK坐标信息及方位角数据,推算出特定型号的六旋翼无人机的螺旋桨坐标信息。根据坐标信息变化获取无人机的倾角,建立了根据无人机飞行倾角的风速估算模型。为了验证其模型的精度,通过风洞试验经验其精度表明,大部分数据精度为0.996 m/s,进而提出了一种通过旋翼无人机飞行倾角来测算风速风向的新方法,可为无人机森林火灾扑救指挥等相关应急救援提供实时的风速信息,为指挥人员的决策指挥提供参考信息,具有一定的实用价值。
