倒垂系统在边坡变形监测控制网中的应用
2020-01-02张宇,史波,曹健
张 宇,史 波,曹 健
(1.长江空间信息技术工程有限公司,湖北武汉 430100;2.武汉智图科技有限责任公司,湖北武汉 430200)
1 边坡变形监测
边坡变形监测是掌握边坡变形规律的重要手段,通常采用大地测量技术对监测点进行周期观测,为边坡稳定性评价提供基础资料[1-2]。监测成果(经典平差)依赖于一个高精度、高可靠性、高灵敏性和低成本的变形监测控制网。变形监测控制网是为监测变形体在水平、竖直方向上的形变量,检验工作基点的稳定性而建立的专用测量网,主要作用包括:①建立工程变形监测的统一基准;②检验工作基点的稳定性。变形监测控制网包括基准网(由基准点和部分工作基点构成)和观测网(由部分基准点、工作基点和监测点构成),其中基准网为变形监测量提供位置基准,观测网是为了精确确定监测点相对于位置基准的变形量。
为减少累计测量误差及观测工作量,通常在变形监测网中布设工作基点网,工作基点设置在比较稳定、与监测对象通视条件较好、便于观测的位置,其坐标值作为起算数据被用来直接推算观测点位移量[3-4]。由于工作基点往往离变形体较近,同时受地质结构、水位变化及温度变化等影响,工作基点会发生一定程度的位移。为保证监测成果的可靠性,根据监测技术规范要求,工作基点网每半年复测一次[5]。常规做法将基准网点和工作基点进行联测,利用基准网点对其检核,这种方法能满足工程需要,但由于部分工作基点离基准网点较远,点位精度较差,无法满足相应设计要求。为此,提出将倒垂系统应用到水电站边坡变形监测控制网中,将倒垂建在施工区内,为工作基点网提供起算基准。
2 倒垂系统与边坡变形监测控制网
2.1 倒垂系统工作原理
倒垂线是将垂线(直径为1 mm 左右的不锈钢丝)的底部用锚块锚固在地基深层基岩上,顶端根据浮体原理,采用浮箱支承特制的浮体将钢丝拉紧,使其成为一条顶端自由的铅垂线,如图1 所示。图1中,A 表示浮体,B 为钢丝锚固点,C 为垂线正确位置,D 为浮箱,e 表示A 偏离C 的距离。根据力学原理可知:垂线总会静止于垂直位置BC。
倒垂系统由浮体组、垂线、锚固块和观测台组成。浮体组宜采用恒定浮力式,也可采用非恒定浮力式。浮体浮力F 取值与倒垂线长度有关,为了得到较好的钢丝张紧效果,建议按下式近似计算,即

式中,F 为垂线浮体的浮力,N;L 为倒垂线长度,m;K 为系数,一般K =(0.01~0.02)/m[6]。

图1 倒垂线系统工作原理示意
2.2 边坡变形监测控制网
边坡变形监测控制网的校核网点一般远离变形体,从校核网点推算出基准网点的坐标,再以基准网点推算工作基点坐标,这是变形监测控制网进行逐级控制的常用方法。在实际生产中,由于部分基准网点不稳定,需要定期复测基准网,同时对工作基点进行适时改算来满足常规监测需求。根据误差传播定律可知,离校核网较远的工作基点的精度较差,如图2所示,很难满足规范要求。

图2 测边锁点位误差椭圆
2.3 倒垂系统与边坡变形控制网点的结合
垂线总静止于垂直位置BC 这一特性,是利用倒垂为变形监测基准网提供起算基准的理论依据。变形监测基准网点应紧邻倒垂线装置,利用安置在倒垂孔上的观测墩(有强制对中装置)上的垂线坐标仪,可同时测定地面观测墩相对于倒垂线的坐标值(x,y),见图3。比较不同观测时间的坐标,即可求得地面观测墩的偏移值,得到观测墩的精确坐标[3],根据精度忽略不计的原则,采用此偏移值对埋设在倒垂线附近的基准网点进行坐标改正,获得基准网点的精确坐标,结合流程如图4所示。
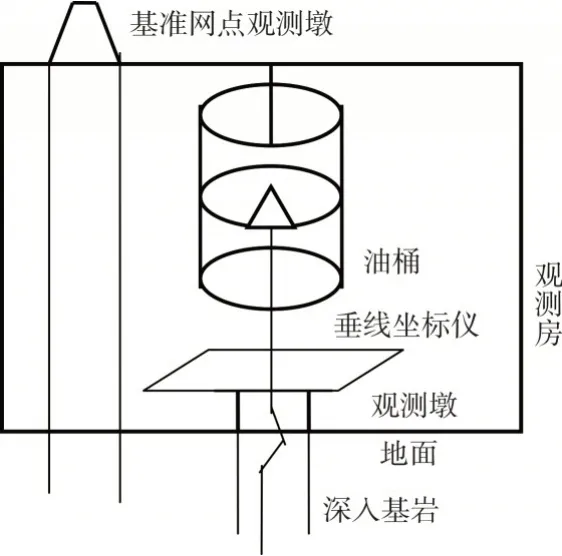
图3 倒垂在变形监测控制网中的应用原理示意
将倒垂系统应用到边坡监测控制网中,为变形监测控制网提供起算基准,可起到以下作用:①改善变形监测控制网的图形条件,提高监测网的精度;②减少基准网复测的工作量,节省成本;③倒垂系统便于自动观测,为边坡自动化监测提供实时稳定可靠的基准。
4 应用实例
4.1 工程概况
溪洛渡水电站位于四川省雷波县与云南省永善县交界的金沙江干流上,由拦河大坝、泄洪建筑物、引水发电建筑物及导流建筑物组成。坝址位于永盛向斜的西翼,构造影响较弱,坝区无断层分布,层间、层内错动带和节理裂隙是坝区的主要结构面。坝址区气候的垂直差异突出,年平均气温为12.2 ℃~19.7 ℃。年降水量为547.3~832.7 mm,相对湿度为66%~84%。为分析各种建筑物和地质构造的稳定性,给工程安全诊断提供必要的参考信息,对该水电站边坡进行了安全监测设计,主要监测对象包括:左右岸高程400 m以上坝肩开挖边坡、左右岸缆机平台边坡、左右岸泄洪洞进口边坡和左右岸堆积体边坡。
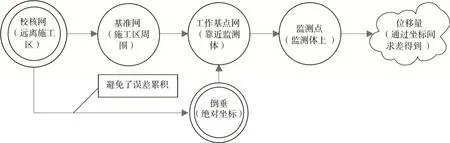
图4 倒垂系统与变形监测控制网点结合流程
溪洛渡水电站的边坡变形监测控制网由远离施工区的校核网和基准网组成,由于基准网点基本上处于高程700 m 以上,而边坡监测点高程一般较低,大都在高程400~700 m 之间,造成部分测点与基准网点之间无法通视,且大部分测点与基准网点之间的垂直角较大,对监测精度有一定影响,为弥补这一缺陷,建立了工作基点网,与基准网、校核网组成测边网。
4.2 基准网点与倒垂线布设
该基准网共布设了12 个点,由校核网点TM1、TM3、TM4 与基准网点TN1、TN2、TM2、TN4、TN5、TN6、TN7、TN8、TN14组成测边网(见图5)。由于部分基准网点离校核网点较远,首先由TM1、TM3、TM4 与TN1、TN2 组成校核网,得到TN1、TN2 的坐标,作为基准网的起算基准,基准网需每隔半年复测一次。

图5 基准网(无倒垂)
测边网以连续三角形为主体进行交会定点,随着锁的延伸,垂直于延伸方向的累计误差随着距离的增加而增加。该基准网的平均观测边长达1 316.671 m。复测成果表明:TN7、TN8、TN14 的点位精度在±1.29~±1.80 mm之间,无法满足一等变形监测的精度要求(±1.4 mm),同时部分基准网点不稳定,存在较大程度位移。2008年5月复测后发现,TN1 累计X、Y、H 方向变化为-53.89,8.10 mm 和12.77 mm,TN2 累计X、Y、H 方向变化为12.08,37.18 mm和3.80 mm。
由于该基准网的精度和稳定性无法满足常规监测的需要,设计方建议进行基准网改造,改造方法为将倒垂系统应用到边坡变形监测控制网中,即在大坝施工区附近建立4 个倒垂TN2n、TN3n、TN5n、TN6n,构成稳定性极强的大地四边形,与原基准网点构成新的基准网,如图6 所示。通过TM1、TM2、TM3确定倒垂的初始坐标,在倒垂观测房顶建造观测墩,依据精度忽略不计原则,利用倒垂的观测值对观测墩实时进行坐标改正,获取4 个观测墩TN2n、TN3n、TN5n、TN6n 的精确坐标,为基准网和工作基点网提供高精度、稳定的起算点。
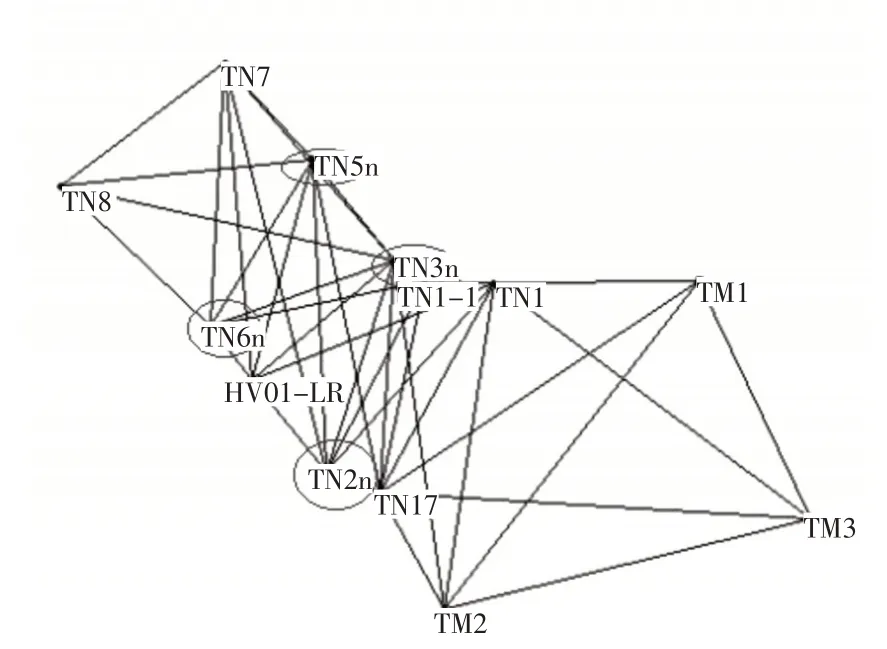
图6 基准网(增加倒垂)
4.3 布设倒垂前后基准网对比分析
此次倒垂系统的应用,突破了基准点必须远离变形体的限制,将基准网的起算点放在施工区内,改变了之前从一端向另一端不断延伸的网图结构,大大提高了监测网点的精度和可靠性,同时节省了观测成本。
(1)便于工作基点网复测,节省了观测成本。布设前,工作基点网以基准网点TN6、TN14、TM1、TM2、TM3 为起算点,这几个点均远离变形体,平均边长达951 m,个别点(HV13-JDL)需要加测方向才能满足点位精度的要求,共需要观测128 条边和5个方向。由于部分基准网点的不稳定性,需要适时对基准网进行复测,复测一次基准网共需要观测76个方向和38 条边长。为保持常规监测成果的连续性,每复测一次基准网,都需要对工作基点进行一次改算。
布设后,工作基点网直接以4 个倒垂点TN2n、TN3n、TN5n、TN6n 起算,平均边长减少至800 m,只需要观测108条边就可以达到很好的精度。按照设计要求,基准网每年进行一次复测即可,大大节省了观测成本。
(2)提高了工作基点网和基准网的点位精度。本次倒垂系统应用相当于对变形监测控制网进行了一类设计,即在观测精度和坐标向量协因数阵一定的情况下,通过在施工区增设倒垂,调整了基准网和工作基点网的起算位置,通过对网形参数A 的调整,加强了基准网的图形强度,提高了控制网的整体精度,可用tr(Qx̂x̂)=min 来衡量,其中Qx̂x̂为待求变量的斜因数阵。
布设前后,对同一工作基点网,分别以TN6、TN14、TM1、TM2、TM3和TN2n、TN3n、TN5n、TN6n为起算点,利用长江勘测规划设计研究院编制的“控制网平差软件”对工作基点网的点位精度进行估算,成果见表1。
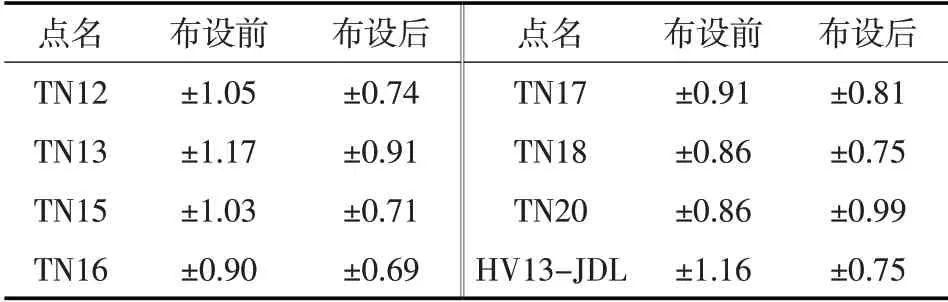
表1 布设前后工作基点网点位精度(估算)对比 mm

表2 布设前后部分测点点位精度(实测)比较 mm
(3)提高了监测基准网的可靠性。基准网的可靠性可分为网的总体可靠性、观测值的内部可靠性(也称局部可靠性)和外部可靠性。对于一个变形监测控制网来说,由其间接观测平差模型( l,Ax,σ02p-1)可得观测值li的内部可靠性ri=(QVVP)ii,其中,l 为常数矩阵,A 为系数矩阵,x为待求量,σ02 为单位权中误差,p-1为权逆阵,QVV为改正数的协因数阵,P 为权阵,上式还满足。对于一个确定的网和设计方案,
观测值之间的精度相差愈大,则内部可靠性ri的值相差愈大。改造前,基准网中最长边和最短边相差1 905 m,对于TCA2003 来讲,其测距精度为1 mm+1ppm,则测距精度相差达2 mm,内部可靠性较差。基准网改造以后减小了最长和最短边之间的差距,提高了内部可靠性。
同时,监测网的可靠性也可通过多余观测数和平均多余观测分量来衡量,设控制网的网点数为m,已知点数为mk,未知点数为mu,已知边和已知方位角数分别为ks和ka(不是由已知点坐标反算得到),进行有方向观测的设站数为ml,只进行有边长观测的设站数为ms,其中有方向或边长观测的已知点设站数为m1,总得观测值数为n(其中方向观测值数为nl,边长观测值数为ns),必要观测值个数为t,多余观测值数为r,平均多余观测分量为,则有[1]:

倒垂系统布设前后,通过计算分别得到多余观测值和平均多余观测分量为:。
5 结 论
由于受地质、地形等条件的限制,往往难以将监测网的起算基准引到施工区。利用倒垂基岩点稳定性高的特点可解决上述问题。通过工程实例分析发现,将倒垂系统应用到边坡变形监测控制网中,可以发挥以下作用:
(1)为基准网和工作基点网提供可靠、稳定、高精度的起算基准,有效地改善了监测网的图形强度,为工作基点网的复测提供了便利,节省了观测成本,提高了监测网的精度和可靠性。
(2)4个倒垂点离边坡较近,可为后续的边坡自动化变形监测提供高精度、稳定和可靠的基准。
(3)利用倒垂附近基准网点的精确坐标和实测的气象元素构建气象差分改正模型,对监测区域的电磁波测距进行气象差分改正,可提高测量机器人在变形监测中的自动化程度。
