船载三维激光扫描系统在西部重要高原湖泊测量中的应用研究
2020-01-02全小龙
黄 童,全小龙,李 腾,简 弈
(长江水利委员会水文局长江三峡水文水资源勘测局,湖北宜昌 443003)
1 研究背景
三维激光扫描技术分为地面固定式激光扫描技术和移动激光扫描技术。由于实际测量需求不同,搭载移动激光扫描系统的载体也不同,常见的载体有飞机、车辆、船舰和人等[1-2]。近年来,随着三维激光扫描、计算机技术以及高精度惯性导航系统的快速发展,船载三维激光扫描系统在河道测量、滩涂崩岸测量和海岛礁测量等工程中的应用也越来越广泛。彭彤[2]阐述了基于船载移动激光扫描的滩涂崩岸测量系统关键技术,并利用该系统在长江澄通河段南岸附近进行了扫测,获取了精确的扫描数据。陈尚登等[3]使用基于Rigel VZ1000的船载三维激光扫描系统对某内河航道的沿岸地形进行了测量,验证了船载激光扫描系统在大比例尺测图中应用的有效性。李腾等[4]使用基于Rigel VZ1000的船载三维激光扫描系统对三峡库区库岸地形进行了扫测,并对其精度进行了评定,证实了测量成果可满足多种比例尺测图需要。汪连贺[5]介绍了中海达iScan三维激光移动测量系统,并利用该系统成功完成了海岛礁岸线地形测量,精度满足测量要求。由此可见,船载三维激光扫描系统在内陆和近海水域的沿岸地形测量中具有可行性、可靠性和精确性。目前,国内西部重要高原湖泊测量的研究较少,因此该系统能否在西部重要高原湖泊陆域地形测量中成功应用尚未可知。
我国西部地区湖泊众多,特别是高原湖泊,是西部生态安全屏障的重要组成部分。由于大多数湖泊地处偏远,自然环境恶劣,交通不便,人迹罕至,且受到原有测量技术、手段等众多因素的限制,多数重要湖泊未开展过系统科学的测量工作;加之现有基础资料较少,甚至许多湖泊为历史资料空白区,无法满足当前湖泊治理、生态环境保护、水资源管理和科学研究等工作需要,因此,在水利部的推动下西部重要高原湖泊测量工作在陆续展开[6]。西部重要高原湖泊具有海拔高(海拔一般超过4 500 m)、风浪大、环境恶劣、气候复杂多变等特点,采用传统的测量手段(如实时差分定位(RTK)和全站仪等)和无人机航空摄影测量的方式进行湖泊陆域地形测量均存在一定的局限性,难以满足测量要求。为有效解决该测量难题,首次提出了将船载三维激光扫描系统应用于西部重要高原湖泊陆域的地形测量。本文以西部重要高原湖泊格仁错为例,介绍了船载三维激光扫描系统的组成、工作原理及技术优势,阐述了船载激光扫描系统的坐标转换过程和外业扫测的关键步骤,并结合RTX采集的验证点进行精度评定,证实了其测量精度完全满足测图要求,同时总结了宝贵的测量经验,对类似测量项目具有较好的借鉴意义。
2 现有测量方法
(1)无人机航空摄影测量。无人机航空摄影测量为非接触式测量,但由于无人机体积相对较小,抗大风能力较弱;加之高原空气密度低,无人机功耗也会相对更大,其飞行动力和续航时间与理想水平相差较大,难以应对恶劣的测量环境。
(2)RTK 测量。受流动站和基准站间距的限制,采用该方法测量时需要不断移动基准站,且全球卫星导航系统(GNSS)的卫星信号易受山体遮挡,出现信号失锁现象。
(3)全站仪测量。受仪器最大测程限制,迁站频繁,测量效率低下。
RTK 测量和全站仪测量均属于接触式测量,完全依靠人工采点,测点离散,作业劳动强度大,尤其是在高原缺氧、紫外线照射强烈的恶劣环境下,测量人员的身体健康和人身安全难以保证。而且,两种测量方式均不适用于陡崖、滩地、沼泽地等测船和人员无法到达的危险区域。
3 船载三维激光扫描系统
3.1 系统组成
船载三维激光扫描系统主要由定位定姿系统(GNSS/INS组合)、三维激光扫描仪、高清全景相机、载体平台、计算机以及数据采集与存储软件等组成[7],如图1所示。

图1 船载三维激光扫描仪系统组成示意
3.2 工作原理
三维激光扫描仪和定位定姿系统牢固安装在稳定平台上,实现刚体固连以保证传感器与平台运动完全同步。使用船载激光扫描系统前,需先进行系统检校,确定激光扫描中心与定位定姿系统之间的精确空间位置关系。通过对GNSS数据和惯性测量单元(IMU)数据联合解算,获取高精度的位置和姿态信息,再将位置、姿态信息与三维激光扫描仪获取的激光脚点坐标进行时间和空间配准,得到扫描地物目标的大地三维坐标信息[1]。
3.2.1 时间配准
时间配准是将船载激光扫描系统中各个传感器观测同一目标的不同步数据信息统一为相同的时间基准。通过对各传感器采用的时间系统进行转换,使系统各传感器在同一时刻提供同一目标的观测数据[8-9]。由于GNSS与IMU使用的时间系统是世界标准时间(UTC),三维激光扫描仪使用的是GNSS时间系统,且三维激光扫描仪和IMU的数据采样频率远大于GNSS采样频率,因此,船载激光扫描系统进行作业时,各个传感器的数据获取时刻并不一致。为保证每个时间节点上的数据必须同时包含定位数据、姿态数据和三维激光扫描仪数据,一般采用准确度、稳定度高的GNSS 授时时钟作为时间基准,通过内插方法对多传感器数据进行融合,即将高频率的传感器数据融合到低频率的传感器数据时间节点上。
3.2.2 空间配准
船载三维激光扫描系统由多传感器组成,各传感器采用的坐标系统不同,主要包括三维激光扫描极坐标系、三维激光扫描直角坐标系、IMU 直角坐标系、平台参考坐标系和WGS84大地坐标系。
(1)三维激光扫描极坐标系。以三维激光扫描仪的激光发射点为坐标原点,激光扫描仪的中轴线方向为极轴,极角为扫描方向与极轴的夹角。
(2)三维激光扫描直角坐标系。坐标原点与激光扫描仪极坐标系的原点重合,Z轴与极轴平行,方向垂直向上;X 轴与Z 轴构成激光扫描面(X-O-Z面),X-O-Z面与极平面重合;Y 轴垂直于X-O-Z面指向载体行进方向,构成右手直角坐标系。
(3)IMU 直角坐标系。以IMU 姿态传感器几何中心为原点,以载体行进方向为Y轴;X轴为行进的交叉方向,右侧为正;Z 轴垂直于X 与Y 轴构成的平面,竖直向上,构成右手直角坐标系。
(4)平台参考坐标系。该坐标系实质上是一种站心直角坐标系,以GNSS 天线相位中心为坐标原点,X、Y、Z轴分别指向东、北和沿椭球法线方向。
(5)WGS84大地坐标系。坐标原点位于地球质心,Z轴指向国际时间服务机构(BIH)1984.0定义的协议地球极(CTP)方向;X轴指向BIH的零子午面和CTP 赤道的交点;Y 轴与Z 轴、X 轴垂直构成右手坐标系。
为了对采集数据进行融合处理,需要将外业采集数据在时间配准的基础上进行空间配准,即多传感器局部坐标系和全局参考坐标系间的转换,最终将三维激光扫描极坐标转换为WGS84大地坐标系,具体转换流程见图2。

图2 坐标系转换流程
3.3 技术优势
针对西部重要高原湖泊海拔较高、环境恶劣、气候复杂多变、四周交通不便、陆上植被稀疏等特点,船载三维激光扫描系统相较于现有测量方法具有明显优势,主要体现在以下几个方面:
(1)该系统为非接触测量,自动化程度高。所有测点数据由仪器自动采集,无需人工跑点,可极大减轻野外作业劳动强度并降低测量人员安全风险。
(2)测量数据为三维点云数据,数据精度高、密度高;扫描速度快,测量效率高。
(3)能够对陡崖、滩地、沼泽地等测船和人员无法到达的危险区域进行测量。
(4)系统具有相对较强的环境适应能力。近水边作业时,在燃油准备充足和船只大小合适的情况下,该方法可保证系统具有续航能力和抗风浪能力。
4 湖泊陆域地形扫测及精度评定
格仁错位于西藏申扎、尼玛两县,地处冈底斯山北坡断陷盆地内,地理坐标为北纬30°57′~31°19′,东经88°03′~88°34′。湖面海拔约4 650 m,面积约485 km2。湖泊呈西北-东南走向的长条状,长约60 km,最大宽约14 km,平均宽约8 km。湖区属羌塘高寒草原半干旱气候,年均气温约0 ℃,年降水量200~300 mm。该位置交通极其不便,针对湖区周边植被稀疏、地物较少的特点,采用船载三维激光扫描系统对格仁错陆域地形进行了扫测,快速有效地获取了三维激光点云和全景影像,扫测使用的主要仪器设备见表1。

表1 主要仪器设备
4.1 外业数据采集
(1)设备安装。首先将集成传感器的支架固定在测量船上,然后将Rigle VZ2000三维激光扫描仪、Trimble R10 GNSS、OCTANS运动传感器分别安装在支架上。安装时既要保证安装平台强度,又要保证各硬件的相对稳固性,如图3所示。连接UPS、设备与电脑等之间的电缆线及数据线,并配置电脑的网络设置连接各传感器。

图3 仪器设备安装
(2)GNSS定位。采用Trimble R10 GNSS系统以及Trimble RTX(Real-Time extended,实时差分扩展)技术进行实时精密单点定位。该技术通过卫星或网络方式播发改正数,可实时提供厘米级全球精密定位服务,无需连接物理基站或CORS网络,真正实现了全星座GNSS定位服务。
(3)IMU 对齐。系统开机后首先将船体进行高
黄 童等 船载三维激光扫描系统在西部重要高原湖泊测量中的应用研究动态运动使IMU 设备对齐,IMU对齐按照直线、“8”字形以及圆形的轨迹布置收敛速度最快[10]。
(4)三维点云数据采集。根据现场湖区地形情况,先对船载三维激光扫描系统的测量参数(激光扫测距离、角度分辨率、相机曝光参数等)进行设置,测船在近水边按照不超过7节的船速行驶,同时使用Qinsy软件进行导航定位和数据采集。
(5)验证点采集。在船载三维激光扫描系统测量过程中,同时采用高精度RTX 人工测量的方法,对陆上房角点、围墙转折点等特征点进行采集,对船载三维激光扫测的精度进行分析评价。
4.2 内业数据处理
格仁错测量总指挥部下设的测量队经过3 d 的野外作业,共完成了格仁错湖区约130 km的陆上数据采集。内业数据处理采用Qinsy 软件、RiSCAN PRO 软件和清华山维EPS 软件,具体处理流程见图4。

图4 内业数据处理流程
(1)数据检查。检查测量范围内是否有空白区,检查点云数据和相机照片质量是否合格。
(2)POS 解算。利用Qinsy 轨迹解算软件,联合GNSS 数据和IMU 数据,通过紧耦合解算模式,解算出高精度的轨迹数据。
(3)点云融合。根据解算出高精度的POS 轨迹数据和求取的测区转换七参数,利用Qinsy 软件进行点云融合,得到2000国家大地坐标系点云数据。
(4)点云滤波。采用三维激光扫描软件RiSCAN PRO 进行点云滤波处理,删除噪声数据和无效数据。
(5)点云分割。根据湖泊测量范围要求,采用三维激光扫描软件RiSCAN PRO将点云数据按照高程进行分割。
(6)数据输出和成图。先将所需数据输出为.las 点云数据,然后导入清华山维EPS 工作空间转换为.PCD点云格式,再将.PCD数据导入EPS三维测图模块,即可实现两个平铺窗口二维和三维联动的测点数据提取和地形图勾绘。
4.3 精度评定
利用高精度RTX 方式共检测和比较了77 个地形和地物特征点,通过同点三维坐标的差值计算点位中误差和高程中误差,统计结果见表2。
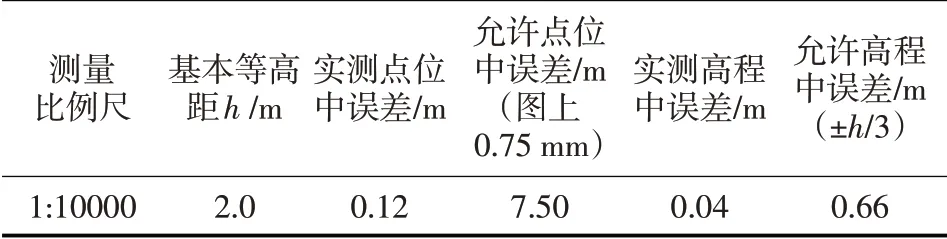
表2 船载三维激光测点精度统计
根据SL257-2017《水道观测规范》中关于地形图测量精度允许误差的规定,船载三维激光扫描系统测量的点云数据精度远高于格仁错1∶10 000 比例尺测图精度要求,甚至可满足1∶500 大比例尺测图精度要求。
5 结 语
三维激光扫描技术是一种先进的全自动高精度立体扫描技术,应用前景广阔。在测量环境极其恶劣的西部高原湖泊测量中采用船载三维激光扫描技术,能极大减轻作业人员劳动强度和作业成本,可有效提高野外作业效率,降低测量人员的作业安全风险。该技术的应用可为今后的西部高原湖泊测量工作提供参考,契合测绘工作动态化、数字化、自动化和智能化的发展趋势。鉴于高原湖泊的特殊性,在高原湖泊测量中应用船载三维激光扫描系统时要注意以下几个问题:
(1)高原天气复杂多变,水上测量作业具有较大的风险。测量人员要提前了解测区的气象信息,以便选择合适的扫测时机,确保测量数据质量和人员安全。
(2)高原环境恶劣、条件艰苦,测量前应根据湖区地形提前规划好扫测航线,尽量提高测量效率和缩短野外作业时间。
(3)高原湖泊风浪较大,要尽量选择稳定性和适航性较好的测船;仪器安装时既要保证安装平台强度,又要保证各硬件的相对稳固性。
(4)高原湖泊水域宽广,作业范围大,测量时建议优先考虑采用可以实时提供厘米级全球精密定位服务的Trimble RTX技术进行定位导航。
