火星车有风热平衡试验环境模拟技术
2020-01-02高庆华刘佳彬金翠玲王辰星
高庆华,李 鹏,刘佳彬,金翠玲,王辰星
(1.北京卫星环境工程研究所;2.中国空间技术研究院:北京100094)
0 引言
我国首次火星探测任务中将使用火星车进行火星表面的巡视探测。火星表面温度范围为-120~27℃,大气压力范围为150~1400 Pa,主要成分为CO2,风速一般为0~15 m/s[1-3]。为适应火星表面热环境,火星车的热设计采用了热控结构一体化纳米气凝胶隔热技术、太阳能高效收集与利用技术以及相变储能装置。为了获取不同风速、风向、风温条件下火星车舱外强迫对流换热系数,评估外部风场对舱内气体换热性能的影响,修正火星车热分析模型,需要在地面开展火星车有风热平衡试验。
在地面模拟火星表面的低压、有风、宽温区等综合特殊热环境存在很大难度,尤其是低压CO2环境下的风速模拟和测量。为满足火星大气环境模拟的要求,多国建设了相关的火星风洞[4-10],如英国卢瑟福-阿普尔顿实验室的空间试验容器(用于“猎犬2号”火星着陆器的热平衡试验)、英国牛津大学的MEWT风洞、美国NASA 艾姆斯研究中心的MARSWIT火星风洞、美国喷气推进实验室的10英尺容器(完成Pathfinder 探测器的热试验)、丹麦奥尔胡思大学的AWTS风洞、日本东北大学的MWT 火星风洞等。北京卫星环境工程研究所于2017年在KM6F环境模拟设备内建设了火星压力、温度控制系统,具备火星表面温度、压力、气体氛围模拟能力,但不包括风速模拟能力[11]。
为了完成我国首个火星车的有风热平衡试验,北京卫星环境工程研究所依托KM3E 真空模拟容器,完成回流式风洞的气动设计、气动仿真、结构设计及结构强度分析等,在KM3E内部增加环状回流式风洞,实现火星表面环境的风速模拟;开展热球风速仪在低温低压环境下的风速标定和测量研究,设计压控系统、热沉调温系统、火星车姿态调整系统,使KM3E具备火星表面风场、气体温度、气体成分、压力等综合热环境模拟条件。火星车热试验时,实现风速最大为20.8 m/s,风场均匀性优于±0.8 m/s,湍流度小于3.2%;风速测量精度优于±0.5 m/s;压力控制为1400 Pa,控制精度优于±5 Pa;气体温度最低约-85℃,均匀性优于±5℃;火星车姿态调整范围为-90°~90°,控制精度优于±0.5°。利用该环境模拟技术顺利完成了火星车有风热平衡试验,对火星车保温系统性能进行了验证,为火星车热分析模型修正提供了重要参考。
1 火星表面有风环境模拟
火星车有风热平衡试验环境模拟技术主要针对火星表面的风速、风向、气体温度、气体成分、压力等综合热环境进行模拟,在原KM3E 真空模拟容器内增加风速模拟、风速标定和测量、压力及气体成分控制、气体温度模拟、火星车姿态控制系统等来模拟火星表面有风热环境。模拟系统组成如图1所示。

图1 火星车有风热平衡试验模拟系统组成Fig.1 Configuration of Mars rover wind thermal balance simulation system
1.1 风速模拟
火星表面温度范围为-120~27 ℃,压力范围为150~1400 Pa,气体成分主要为CO2。在此压力范围内CO2分子自由程范围为1.54~28.7μm[12],如果特征长度取10 mm,那么对应的克努森数Kn<0.01,此时仍为连续介质流动,气体分子的碰撞频率远大于气体分子与物体之间的碰撞频率,气体动力学中的Navier-Stokes方程仍然适用,但是对于低温低压下的气体工作特性、仿真模拟、动力实现、低温风扇材料选取等方面均存在难度,可供参考的经验很少。鉴于此,依托KM3E开展低温低压风洞的结构设计和气动设计,完成设计计算和仿真。
风洞形式为环状回流式,动力段采用低噪声直流风扇,风洞包括进口转弯段、整流段、试验段、收缩段、动力段和出口转弯段,如图2所示。在KM3E内增加内流道,调温热沉当做外流道,两端布置转向180°的导流段,在试验段前布置降湍网、整流蜂窝器等,形成环状回流式风洞。风扇为流场提供动力,气体流经风扇进行升压,向下游流向出口转弯段,从出口转弯段流出后进入内外流道之间的空间,随后进入进口转弯段,流经整流段后进入试验段,得到满足风速、风温的流场,然后进入收缩段,最后回到动力段,完成整个循环。

图2 风洞结构Fig.2 Wind tunnel structure
风扇系统设计利用自由涡流与叶栅修正理论,采用桨叶加反扭导流片组成的低噪声轴流风扇系统,设计工况为试验段风速20 m/s。动力段模型如图3所示,仿真采用Fluent 软件,风洞三维模型网格划分采用分区域混合网格,风扇段采用结构网格,洞体采用非结构网格,仿真结果如图4所示。
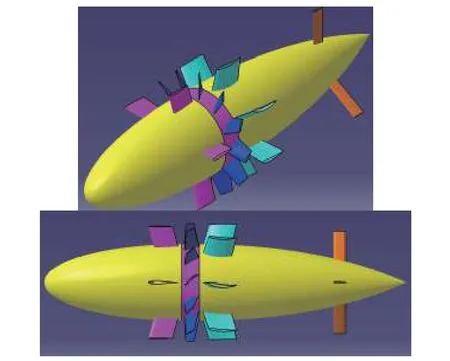
图3 动力段风扇外形Fig.3 Power section outlinedrawing

图4 风洞内压力和速度分布仿真云图Fig.4 Cloud map of pressure and velocity distributions
经实测,风场均匀性优于±0.8 m/s,如图5所示。火星车热平衡试验过程中,最大风速20.8 m/s,如图6所示,最大湍流度为3.2%。

图5 风场均匀性Fig.5 Wind field uniformity map

图6 火星车热试验时风速测量曲线Fig.6 Wind speed during the thermal test of the Mars rover
1.2 风速标定和测量
常用的风速传感器有毕托管风速仪、热式风速仪、超声风速仪、离子漂移风速仪、激光多普勒风速仪和粒子成像风速仪。其中,火星表面为低压环境,流动产生的动压小,因此毕托管风速仪不适合;而超声风速仪结构尺寸较大,对风场影响大;离子漂移风速仪和粒子成像风速仪需要在流场中加入介质,对火星车有影响;激光多普勒风速仪不适合测量整个面的风场分布。因此,本次火星热环境模拟中选用热式风速仪。热式风速仪又可以分为热球风速仪、热线风速仪和热膜风速仪。热线和热膜风速仪使用起来相对复杂,热球风速仪响应速度虽然相对较慢(秒量级),但是对于火星车的热试验已经足够,因此最终选用热球风速仪,不过在使用之前需要进行对应试验工况的温度、压力、气体成分下的风速标定。
风速标定常用的方式有标准风洞和悬臂等,本次试验采用悬臂方式[13-15]在KM6F容器内进行标定,状态如图7所示。当容器内压力、气体温度、气体成分达到要求值时,启动转台,开始标定。根据试验工况,共标定4组数据(其中,T1为气体温度,T2为热沉温度),结果如图8所示。热球风速仪标定误差由长度误差、转速测量误差与流场被扰动误差组成,长度测量、转速测量误差约为0.07 m/s,流场被扰动误差约为0.35 m/s;在试验中,误差主要包括由风温引起的误差和零点修正误差,均约为0.02 m/s。总误差约为0.46 m/s。

图7 热球风速仪在KM6F中进行悬臂标定Fig.7 Hot-bulb anemometer calibration in KM6F

试验过程中风速测量系统连接如图9所示。风速传感器标定和使用中有2种驱动方式:1)所有传感器施加相同的电流,记录每个传感器的输出;2)每个传感器施加的电流不同,但保证0风速时输出信号伏值相同。本次试验采取第1种方式。

图9 热球风速测量系统Fig.9 Hot-bulb anemometer wind speed measurement system
1.3 压力控制
压力控制系统模拟火星表面的气体氛围和气体压力,压力控制的难点主要是:低温低压下CO2气体易凝华,影响压力稳定,而且气体温度低会对真空系统造成损坏。压力控制系统主要由真空系统、真空测量系统、充气系统、试验辅助系统和测控系统组成(如图10所示)。控制效果如图11所示,试验气体为CO2,压力控制为1400 Pa,控制精度优于±5 Pa。

图10 压力控制系统组成Fig.10 Pressurecontrol system

图11 压力控制过程曲线Fig.11 Curve of the pressure control process
1.4 温度模拟
火星表面气体与火表温度模拟依靠调温热沉实现,调温热沉温度控制范围宽,均匀性和升降温速率要求高,热负荷及其分布和质量流量分配均需要设计和仿真,温控反馈控制方法难度大,无法通过常规的环模设备来实现。
为满足火星表面气体和火表温度模拟的控制要求,采取液氮、气氮和电加热器结合的方式实现温度调节。KM3E气氮调温热沉由气氮系统、液氮喷淋系统、气氮进气管路和气氮回气管路4部分组成,其流程原理如图12 所示。气氮调温系统采用氮气作为载冷剂,低温工况时,从热沉返回的氮气,由风机送入液氮换热器换热,得到低温氮气送入热沉,形成密闭循环;在液氮换热器与热沉之间有电加热器,高温工况时使用电加热器对氮气进行加热,再将高温氮气送入热沉。用Thermal Desktop软件对柱段热沉建模并进行热分析计算,模型及分析结果如图13所示。

图12 气氮调温系统流程原理Fig.12 Principle of the gas and nitrogen temperature controlsystem
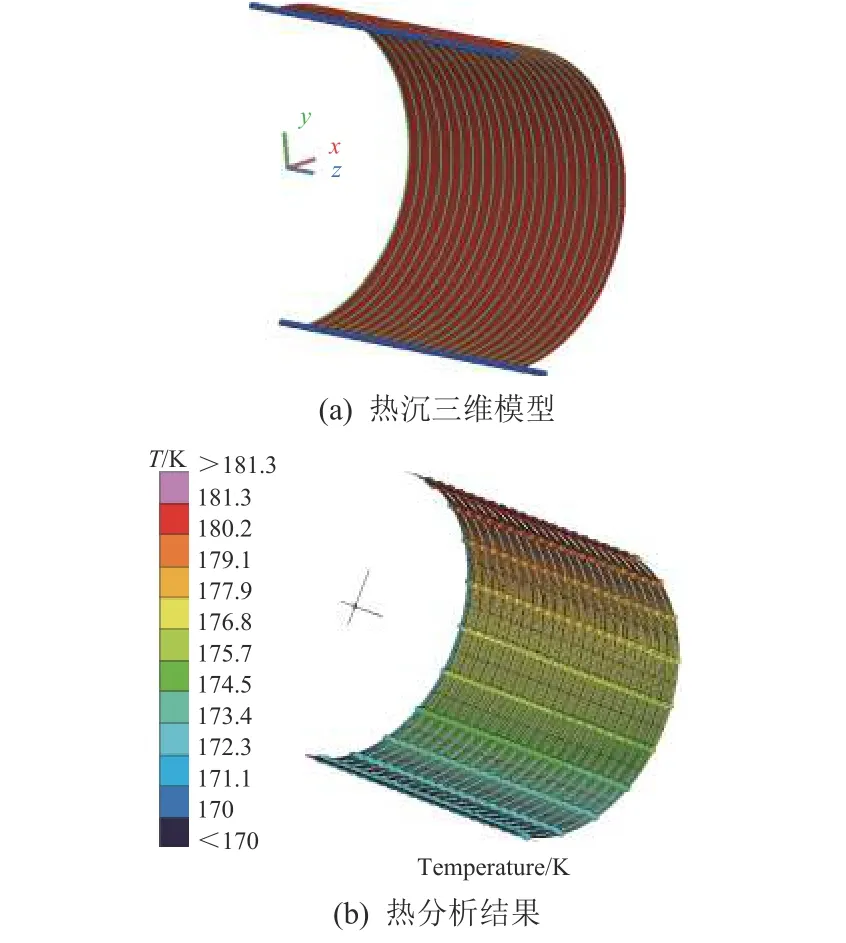
图13 柱段热沉的TD模型及分析结果Fig.13 TD model and analysis results of the column heat sink
火星车有风热平衡试验过程中,试验段入口段气体温度和均匀性如图14所示。可以看出大部分时间的气体温度均匀性优于±5℃,转工况时均匀性较差。
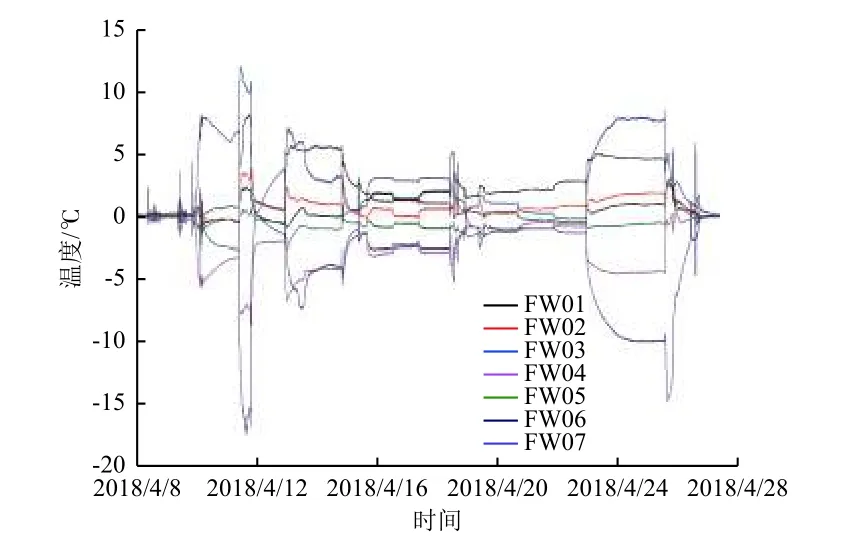
图14 试验段入口段气体温度和均匀性曲线Fig.14 Air temperature and uniformity at the inlet of test section
1.5 火星车姿态
为了验证火星车不同表面迎风的热控设计效果,试验要求火星车支架可以在-90°~90°范围内连续转动并可停留在任意位置,姿态调整装置如图15所示,该系统的主要设计难点是低温低压下的电机运动调节,最终通过对电机采取温控措施和适应性改造等,实现了火星车转动控制,控制精度优于±0.5°。

图15 火星车姿态调整装置Fig.15 Mars rover’sattitude adjustment system
2 注意事项
试验过程中,温度控制时需要关注试验气体的温度和压力状态;另外注意由于内部对流加强,容易造成容器壁温度降低。
1)试验用CO2的三相点为0.518 MPa,温度为-56.4℃[16]。在1400 Pa 时,CO2的 凝 华 温 度 为-119℃,低于此温度会凝结成固体,同时导致容器内压力控制不稳定。因此,在试验压力为1400 Pa、气体为CO2时,需要控制热沉温度高于-119℃;对于其他压力下气体为CO2的热试验,需要查询相关数据确定CO2不凝结的最低温度。
2)在火星车有风试验时,容器内部气体是1400 Pa的CO2,热沉与容器壁之间对流换热加剧,容器壁温度容易降至露点以下,使容器外壁结露甚至结冰,导致内部气体温度场不均匀,而且对容器壁的加强肋强度是很大的考验;另外如果结露发生在法兰电缆插头处,会导致电缆绝缘性能变差,甚至漏电。为此,需要采取以下措施:在热沉和容器壁之间铺设多层隔热组件;在容器外部粘贴温度传感器,实时监测温度变化;在容器内壁换热较强烈区域外侧的对应位置利用风扇吹风,防止结露。
3 结束语
本文针对火星车有风热平衡试验的特殊环境需求,开展火星表面热环境模拟技术的研究。选用KM3E进行改造,在容器内部增加环状回流式风洞,并进行气动设计、强度设计和仿真计算,优化流道和导流片等参数;开展热球风速仪低温低压环境下的风速标定和测量研究,设计压控系统、热沉调温系统、火星车姿态调整系统,使KM3E具备火星表面的风场、气体温度、气体成分、压力等热环境模拟条件。通过精心设计和实施,实现了火星表面热环境的真实模拟,完成了火星车有风热平衡试验,为火星车热分析模型修正提供了重要参考。火星车热试验时,风速最大为20.8 m/s,风场均匀性优于±0.8 m/s,湍流度小于3.2%;风速测量精度优于±0.5 m/s;压力控制范围为真空和1400 Pa,1400 Pa时控制精度优于±5 Pa;气体温度最低约-85℃,均匀性优于±5℃;火星车姿态调整范围为-90°~90°,控制精度优于±0.5°。
