定位控制理论分析及在运卷小车中的应用研究
2020-01-01喻鸿雁
喻鸿雁
(攀钢集团工程技术有限公司安全环保部,四川 攀枝花 617000)
均方根定位在实际工程中的局限性有两种,第一种,当被控对象运行速度小于某一值时会因为摩擦力等原因停止运行。以运卷小车为例,vmin 其实就是被控对象的起动摩擦力。第二种,由于被控对象的定位有允许误差存在,所以会以允许误差等级为参考设定一个制动区域,当被控对象进入这个区域时,我们可以认为定位结束,这时我们会结束定位控制并停止输出的给定,同时开始制动。所以我们把由这个区域所组成的死区叫作制动死区。当然,制动死区一般都是小于被控对象所允许的定位误差的。均方根定位在实际工程中存在有理想的一种情况,但是这种情况最后仍进入死区,但还是可以定位在允许误差所规定的设定区域里。但我们前面已经说过,由于客观误差和响应滞后的存在,在定位精度要求非常高且被控对象本身固有惯性非常大的的控制过程中,这几乎是不可能的。这就是为什么单单采用均方根定位方式在工程实践中无法实现精确控制的原因。那么如何解决这个问题呢?不妨人为做一条斜率为K 并经过原点的这样一条直线。如果这条降速K 线实际可以存在,并且与被控对象的运行轨迹曲线相交,那么被控对象就能在实际运行中切换到K 线运行轨迹并按照这条K 线进行定位直至进入位置设定区域。这就是K 线定位被提出的“缘由”。
1 均方根定位与K 线定位相结合时速度给定的算法
在实际调试中,当然会出现akmax 本身就小于am 的情况,这时候我们自然可以直接采用K 线定位。但这里只分析我们经常遇到且较复杂一点的均方根与K 线相结合使用时的算法,如图1。

图1
在图2 中我们看到,被控对象的定位轨迹可以分成三个阶段,由于K 线和均方根抛物线是相交的,所以交点,也就是切换点的akmax 就等于被控对象最大加速度am,那么从前面的分析我们已经知道,K 线定位的起始点到设定点的距离应该是:

由于被控对象以均方根方式降速的这段距离即Sa 到Sb的过程中速度一直是个变量,我们用积分的算法进行计算:

将上述(2),(3),(4)三式联立,我们可以得到如下算式:

那么,整个降速的距离就应该是:

由算式(1)我们可以得到在曲线ab 段,也就是均方根降速阶段速度给定和位置偏差的关系如下:

由算式(2)我们可以得到在直线bc 段,也就是在K 线降速阶段速度给定和位置偏差的关系如下:

2 均方根定位与K 线定位相结合的简化程序
确认了不同的定位过程中的速度给定与位置偏差的关系,我们便能很容易地开始编写程序,当然这之前还是要写出算法程序的流程框图,需要说明一点的就是,流程框图中的X1 其实就是算式中的Sb。为了便于引用下面的程序我们在这里更改了变量名。下面就以常用的FCB(功能图语言)的方式,以冷轧生产线最常用的运卷小车的定位控制来举例这个控制程序的编写,如图2。
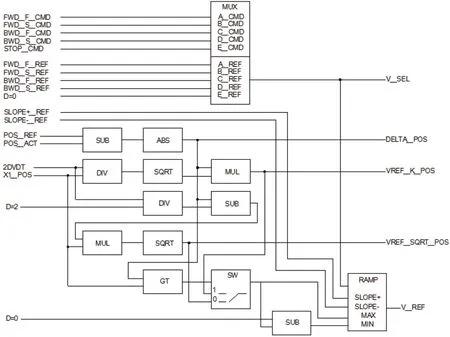
图2
图2 中各功能块含义如下:
SUB: 减法器 ABS: 取绝对值 DIV: 除法器 MUL:乘法器 SQRT:取均方根
MUX:多路选通 RAMP:斜坡发生器 GT:大于判断 SW:二路选通
对于以上参数的设定和调试,我们可以很清楚地看到,首先我们要在设备安全运行的前提下根据生产要求制定好小车能够正常运行的逻辑命令和相关的速度给定,即下面这些参数
FWD_F_CMD;
FWD_S_CMD;
BWD_F_CMD;
BWD_S_CMD;
STOP_CMD;
FWD_F_REF;
FWD_S_ REF;
BWD_F_ REF;
BWD_S_ REF;
并且在还要现场勘测出根据上卷或下卷需要的停车设定点以便对POS_REF 作出设定,从位置传感器正确读取反馈信号送给POS_ACT 后,便可调节2DVDT和X1_POS,测试小车的定位效果。在测试中,我们要以小车的现场实际停车效果来调节2DVDT和X1_POS 两参数,所以主要就2DVDT 和X1_POS 两参数的使用作分析,而其他参数从略。如图3。
在图3 中我们可以看到Ka,Kb,Kc 三条K 线定位方式。很显然,Kc 由于过小而导致提前进入速度死区而停止,其现场的实际表现为小车在每次定位时距设定点很远的地方就已经停车了。这时,控制器仍在给出速度给定但因为小于小车的启动摩擦力而无法再使小车运行,虽然这个时候我们可以强制输出一个略大于启动摩擦力的最小速度迫使小车行进设定区,但从定位效果上看这并非最好。Ka 为三条K 线定位中斜率最大的一个,我们看到小车在按照Ka 运行时以高速行进制动死区,这时控制系统认为定位结束会停止速度给定,但由于小车本身惯性比较大(考虑到正常生产时还要驮带钢卷),所以小车仍继续向前滑行直到滑出制动死区。其现场表现为小车每次定位都会超过目标位置。显然只有Kb 的停车效果比较好,正好以接近速度死区的速度进入制动死区,使小车平稳地停进设定区域。
3 结语
以上只是我们根据理论算式的分析,列举根据调试中所遇到的现象如何调整均方根定位和K 线定位的两个比较重要的参数。当然现场调试中不可能如上述分析地那样简单,实际需要调整的参数和调谐关系也更加繁多和复杂。不过工程上很多复杂定位的内核算法也就如上,比如焊缝定位,带尾定位甚至一些更精密的位置控制等。所以只有在理论上对定位算法的每个参数有比较深刻的理解,才能在调试中根据现场遇到的问题加以解决。
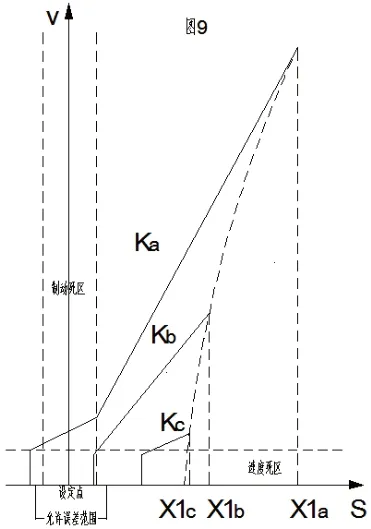
图3
