机器人手术系统与腹腔镜辅助低位直肠癌根治术的疗效初步比较
2020-01-01杜明刚王岩李瑾吕晨光
杜明刚 王岩 李瑾 吕晨光
本研究选取2016年3月~2020年1月在北部战区总医院胃肠外科应用机器人手术系统(美国Intuitive Surgical公司)和腹腔镜实施低位直肠癌手术的患者,比较两组的各项观察测指标,旨在对比分析两组术式在低位直肠癌治疗中的优势所在,为临床治疗提供参考,详细研究内容整理报告如下。
1 资料与方法
1.1一般资料 选取北部战区总医院2016年3月~2020年1月收治的40例开展机器人手术系统辅助低位直肠癌根治术患者为机器人组,另选取40例开展腹腔镜辅助低位直肠癌根治术患者为腹腔镜组。机器人组男15例、女25例;年龄45~72岁,平均年龄(61.6±5.6)岁;平均体质量指数(BMI)(23.0±2.2)kg/m2;PTNMⅠ期6例、Ⅱ期11例、Ⅲ期23例。腹腔镜组男17例、女23例;年龄46~73岁,平均年龄(63.0±6.6)岁;平均BMI(23.5±2.2)kg/m2;PTNM 0期1例、Ⅰ期4例、Ⅱ期6例、Ⅲ期29例。两组患者一般资料比较差异无统计学意义(P>0.05),具有可比性。见表1。纳入标准:术前性功能正常的男性患者;患者和家属签署手术知情同意书;伦理委员会审核批准;直肠肿瘤位置均在直肠腹膜返折以下,距肛门3~8 cm。排除标准:有腹部手术史;复发肿瘤;术前放化疗;排尿功能障碍[1]。
1.2手术方法 无论机器人组还是腹腔镜手术组均严格遵循肿瘤根治原则。两组手术穿刺孔位置见图1,图2。
表1 两组一般资料比较(±s,n)

表1 两组一般资料比较(±s,n)
注:两组比较,P>0.05
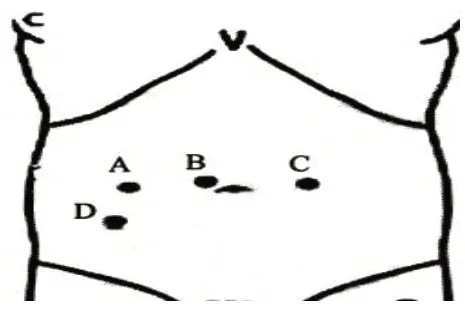
图1 机器人组穿刺孔位置
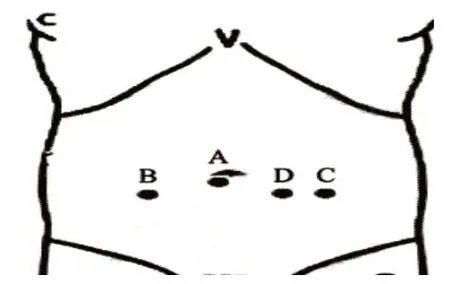
图2 腹腔镜组穿刺孔位置
机器人组于脐部右上约3.5 cm位置B点作观察孔,置入戳卡(12 mm)连接镜头臂。建立气腹,气腹压维持12.0 mm Hg(1 mm Hg=0.133 kPa)。于右侧髂前上棘、脐连线中点偏右约1.5 cm位置作主操作孔D,置入戳卡(8.0 mm),连接1号机械臂。观察孔偏左约9 cm位置作副操作孔C,置入戳卡(8.0 mm),用以连接2号机械臂。主操作孔、观察孔连线中上约2.0 cm位置作辅助操作孔A,并置入戳卡(12.0 mm),助手牵拉、结扎、吸引、冲洗、应用切割闭合器等操作。患者取体位、镜下分离和切除范围基本同腹腔镜手术,术中不再改变体位。腹腔镜组选择脐部A点作为腹腔镜入口,右下腹腹直肌外缘作主操作孔B,并置入戳卡(10.0 mm),左侧腹部D点作为辅助操作孔,置入戳卡(5.0 mm),左侧腹直肌外缘C点作为辅助操作孔,置入戳卡(5.0 mm)[2,3]。
1.3观察指标 观察比较两组手术和术后恢复情况(术中出血量、术后拔尿管时间、手术时间、肠道功能恢复时间、恢复正常饮食时间)、手术并发症(肠梗阻、切口感染)发生情况、病理检查结果、排尿(尿流量、残余尿量、尿潴留)、性功能(阴茎勃起障碍)情况。
1.4统计学方法 采用SPSS20.0统计学软件处理数据。计量资料以均数±标准差(±s)表示,采用t检验;计数资料以率(%)表示,采用χ2检验。P<0.05表示差异有统计学意义。
2 结果
2.1两组手术和术后恢复情况比较 机器人组术中出血量少于腹腔镜组,术后拔尿管时间短于腹腔镜组,差异有统计学意义(P<0.05)。两组手术时间、肠道功能恢复时间、恢复正常饮食时间比较,差异无统计学意义(P>0.05)。见表2。
表2 两组手术和术后恢复情况比较(±s)

表2 两组手术和术后恢复情况比较(±s)
注:与腹腔镜组比较,aP<0.05
2.2两组手术并发症发生情况比较 机器人组发生2例肠梗阻,1例切口感染,并发症发生率为7.50%,经对症治疗后痊愈。腹腔镜组出现2例肠梗阻,3例切口感染,并发症发生率为12.50%,经对症治疗后痊愈。两组手术并发症发生率比较,差异无统计学意义(P>0.05)。
2.3病理检查结果 病理检查结果:两组手术均达到直肠癌根治性手术标准。机器人组获取淋巴结数量(14.0±4.0)个,多于腹腔镜组的(5.0±4.0)个,差异有统计学意义(t=10.0623,P=0.0000<0.05)。切缘均未见癌细胞残留,远切缘-肿瘤距离(4.0±1.0)cm。肠系膜完整性情况,机器人组患者的肠系膜完整保留,腹腔镜组的2例肠系膜有破坏表现。
2.4两组排尿、性功能情况比较 两组术前及术后尿流量、膀胱残余尿量比较,差异均无统计学意义(P>0.05)。见表3。机器人组术后无尿潴留,腹腔镜组术后尿潴留发生率为7.50%(3/40)。机器人组男患者15例,术后2例发生了阴茎勃起障碍,发生率为13.33%(2/15)。腹腔镜组男患者17例,术后3例患者发生了阴茎勃起障碍,发生率为17.65%(3/17)。两组尿潴留发生率、阴茎勃起障碍发生率比较,差异无统计学意义(P>0.05)。
表3 两组尿流量、残余尿量比较(±s)

表3 两组尿流量、残余尿量比较(±s)
注:两组比较,P>0.05
3 讨论
低位直肠癌近年来发病率有递增趋势,尽早采取有效的手术治疗是提高患者安全性、生活与生存质量的关键。临床工作中发现,机器人手术系统同腹腔镜辅助在低位直肠癌根治术中的应用安全、有效,符合肿瘤治疗原则[4,5]。
本研究结果显示:机器人组术中出血量少于腹腔镜组,术后拔尿管时间短于腹腔镜组,差异有统计学意义(P<0.05)。两组手术时间、肠道功能恢复时间、恢复正常饮食时间比较,差异无统计学意义(P>0.05)。两组手术并发症发生率比较,差异无统计学意义(P>0.05)。病理检查结果:两组手术均达到直肠癌根治性手术标准。机器人组获取淋巴结数量多于腹腔镜组,差异有统计学意义(P<0.05)。切缘均未见癌细胞残留,远切缘-肿瘤距离(4.0±1.0)cm。肠系膜完整性情况,机器人组患者的肠系膜完整保留,腹腔镜组2例肠系膜有破坏表现。两组术前及术后尿流量、膀胱残余尿量比较,差异无统计学意义(P>0.05)。机器人组术后无尿潴留,腹腔镜组术后尿潴留发生率为7.50%(3/40);机器人组阴茎勃起障碍发生率为13.33%(2/15),腹腔镜组阴茎勃起障碍发生率为17.65%(3/17)。两组尿潴留发生率、阴茎勃起障碍发生率比较,差异无统计学意义(P>0.05)。提示机器人手术系统辅助低位直肠癌根治术效果更具优势。
综上所述,对比腹腔镜辅助低位直肠癌根治术,机器人手术系统清扫肠系膜、盆腔淋巴结更彻底、根治度更高,不会损伤患者的盆腔自主神经,手术安全性获得保障,减少了患者的手术损伤,是优选术式,具有更广阔的应用前景。