基于饱和原理的柔性机械臂减振研究
2019-12-31高志慧边宇枢
张 戈, 高志慧, 边宇枢
(北京航空航天大学 机械工程及自动化学院,北京 100083)
柔性机械臂因具有轻质、操作灵活、能耗低等特点被广泛应用于工业制造领域与航空航天领域[1]。但柔性机械臂的柔性结构在运动过程中会产生弹性变形和机械振动[2],当机械臂执行搬运、装配、喷涂等往复性作业时,周期性刚性运动或者刚性运动的周期性成分成为持续激励。当持续激励的频率与机械臂模态频率接近时,就会发生共振。这种情况下,即使小幅激励也可激起剧烈振动响应,破坏系统稳定、恶化动态性能。目前常见的工业机械臂,在国际标准测试条件下,其低阶固有频率常低至几赫兹。而轻型高速机械臂与大型空间机械臂的低阶固有频率更可低至1 Hz以下[3-4];另一方面,随着工作速度不断提高,机械臂的操作频率不断趋近机械臂的低阶固有频率。
与柔性结构不同,柔性机械臂不仅模态密集而且模态参数会随拓扑结构的变化而变化。此外,刚性运动引发的激励频率也会随工作任务而改变。在这种情况下,单纯依靠机械臂结构设计难以完全规避共振的发生。另外,阻尼虽然能够在一定程度上减小参数激励共振的非稳定区域,但是不能直接起到消减振幅的作用。因此,单纯通过提高机械臂自身结构阻尼来抑制共振的做法也显得力不从心。
目前国内外对于柔性机械臂的振动研究主要集中在非共振的小幅振动上,对于柔性机械臂在持续激励下的共振的研究尚不多见。
柔性机械臂是刚柔耦合的非线性动力学系统。利用这种系统的独有特性进行减振,为柔性机械臂的振动研究开辟了新的思路。在众多的非线性耦合作用中,饱和是多自由度非线性振动系统的一种特有性质,它的产生依赖于内共振的形成。当非线性振动系统的某些模态频率满足公度关系时,则在一定条件下会形成内共振。众多学者对基于内共振的抑振策略进行了研究[5]。Sun等[6]利用具有时滞的非线性吸振器引起了被控系统不同模态之间的内共振,将低频模态振动能量转换到高频模态,从而抑制了基频范围的振动。Karimpour等[7]利用内共振将悬臂梁的振动能量传递至吸振器并转化为电能。Bian等[8-9]提出了一种基于内共振现象的吸振器,可以快速吸收大部分振动能量,并通过试验验证了其可靠性。但现有研究大多都是针对瞬时激励引起的振动,而非持续激励所引起的振动。
在内共振的基础上,饱和原理进一步揭示了外激励与内共振模态之间存在的一种能量传递关系。当外激励幅值超过临界点时,与外激励共振的内共振模态的振幅不会随外激励幅值的增长而增大,多余能量会被传输到低阶内共振模态中。许多学者对饱和原理进行了研究。Warminski等[10]选取梁、板等作为研究对象,基于饱和原理探讨了利用压电陶瓷致动器去控制主共振或参激共振。Xu等[11]使用非线性饱和控制器有效抑制了非线性束状结构的高振幅振动。Kandil等[12]采用非线性饱和控制器对旋转叶片动力系统在非稳态转速下的振动进行了有效的抑制。但这些研究大多以单一的柔性结构为对象,对于刚柔耦合的柔性机械臂尚未有充分的研究。
本文以刚柔耦合的柔性机械臂为研究对象,利用内共振构建了半主动式吸振器,建立了系统的动力学模型,应用多尺度法求解系统的稳态解,研究了计入吸振器的柔性机械臂在持续小幅外共振激励作用下的饱和现象,并且通过数值仿真验证了吸振器的有效性。
1 系统动力学建模
1.1 建立坐标系与模型假设
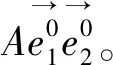
图1 包含吸振器的柔性机械臂模型Fig.1 The model of the flexible manipulator with a vibration absorber
为建立柔性机械臂的动力学模型,需要对柔性机械臂进行模型假设:
1)柔性臂的材质是均匀的,材料是各向同性的,柔性臂的结构满足Euler-Bernoulli梁的特点;
2)柔性机械臂在水平面内运动,柔性臂的弹性变形也发生在该平面内。
采用假设模态法将柔性臂的横向弯曲变形离散。柔性机械臂发生弯曲变形的各阶模态中,第一阶模态动能量较大并在振动响应中起主要作用,因此选取一阶模态作为被控模态。记柔性臂的一阶模态响应为q1,则柔性臂的变形近似为
w(x,t)=φ1(x)q1(t)
(1)
1.2 吸振器控制模型
吸振器主要由电机、刚性支杆两部分组成。刚性支杆简化为无质量刚性杆与端部的集中质量mC。电机作为吸振器定子随柔性臂一起振动,刚性支杆作为吸振器动子在电机的驱动控制下绕电机轴转动。通过控制电机力矩τ2,使得柔性臂的振动模态和吸振器的振动模态形成内共振,构建能量的跨模态迁移通道,并通过吸振器的阻尼消耗振动的能量,从而实现减振。
采用反馈控制原理对吸振器进行控制。设计线性反馈和非线性反馈联合作用的控制器实现振动控制的目标。线性反馈包括位置反馈和速度反馈,引入吸振器振动响应的角位移信号,构造调节吸振器固有频率的刚度项;引入吸振器振动响应的角速度信号,构造调节吸振器阻尼的阻尼项。在线性反馈的基础上,设计非线性反馈,引入柔性机械臂系统振动响应信号,构造调节吸振器与柔性机械臂运动耦合关系的非线性耦合项,改善吸振器系统的动态响应和稳态性能。
因此,吸振器的力矩τ2构造为
(2)

(3)
1.3 建立系统动力学方程
在柔性臂末端D施加力,模拟持续外激励
F=F0cos(ωt+φ)
(4)
应用Kane方法,并代入式(2)~式(4),求得柔性臂的一阶模态响应q1与吸振器的摆动角度φ的动力学方程。其中,吸振器的摆动角度φ也可视为机械臂系统的一个振动模态
(5)
(6)



2 动力学方程的多尺度法求解
2.1 方程无量纲化
为简化推导过程,对式(5)与式(6)进行无量纲化,定义
(7)
得到无量纲化后的方程为
(8)
(9)

2.2 多尺度法求解
运用多尺度方法对无量纲振动控制方程进行摄动近似解析。引入小量参数0<ε≪1,代换系统的非线性项、耦合项和阻尼项,将系统的变量重新标度,规定
(10)
柔性机械臂一阶模态频率ω1≈ω时,外激励与柔性臂的一阶模态发生共振。此时,即使是幅度很小的外激励也会使柔性臂产生较大的振动响应,影响系统的稳定性。本文以一定频带范围内的小幅外激励作用下的柔性机械臂的主共振作为主要研究内容。因此,做弱外激励假设,规定
(11)
将式(10)、式(11)代入式(8)和式(9),略去ε2和更高项,提取ε0,ε1对应的项,可以得到以下方程。
ε0对应的方程
(12)
(13)
ε1对应的方程
(14)
(15)
应用多尺度法求解式(14)和式(15)的近似解,需引入两个不同的时间尺度
T0=τ,T1=ετ
(16)
利用求导的链式法则将无量纲时间τ的一阶导数和二阶导数改写为

(17)
(18)
所取独立的时间尺度的个数取决于求解的精度。这里取到方程的一次近似解
(19)
φ(τ,ε)=φ0(T0,T1)+εφ1(T0,T1)+O(ε2)
(20)
观察式(12)和式(13)的形式,可设其解为
(21)
(22)
(23)
(24)
3 稳态解的分析
计入吸振器的柔性机械臂受到持续外激励后所形成的稳定状态直接反映了吸振器的吸振效果,因此需要求出系统的稳态解。
3.1 求稳态解
在2∶1内共振存在的基础上,分析弱受迫的柔性机械臂发生一阶模态共振时的稳态响应。引入两个解谐参数σ1和σ2,σ1为内共振频率的偏差值,与吸振器的结构设计和控制策略有关,σ2为共振频率的偏差值,与吸振器的减振频带有关,即
ωS2=0.5ωS1+εσ1
(25)
ωS3=ωS1+εσ2
(26)
若存在稳态解,则需要消除长期项。在式(18)和式(19)中,根据消除长期项条件,从而得到可解性条件
(27)
(28)
将式(27)和式(28)中的函数A1,A2表示为极坐标形式
(29)
式中:a1,α1,a2,α2由式(27)和式(28)确定。引入相角
γ1=2σ1T1+2α2-α1
(30)
γ2=σ2T1+φ-α1
(31)
令式(27)与式(28)等号左侧的实部与虚部分别为零,并代入式(29)~式(31)得
(32)
(33)
(34)
(35)

1)单模态解,a1≠0,a2=0,表现为线性振动
将a2代入式(32)和式(34),消去相角γ1可得
(36)
a2=0
(37)
由式(36)可知,单模态解与非线性系数无关。柔性机械臂模态幅值与外激励幅值呈现线性关系,吸振器不工作。
2)双模态解a1≠0,a2≠0,表现为非线性振动
将式(32)~式(35)中的相角γ1和γ2消去可得
(38)
(39)
(40)
(41)
(42)
(43)

3.2 稳态解存在形式的讨论
(44)
由式(44)可以看出,ξ2>ξ1,下面对a1,a2的实数解的存在形式进行讨论。
只存在一个线性解
若U1<0,a2存在三个解,一个线性解,两个非线性解


若U1>0,则只有一个线性解
由上述分析可知,非线性解中柔性机械臂的模态幅值a1与外激励幅值无关,仅与吸振器的速度反馈增益、耦合反馈增益、内外共振的调谐状态以及系统的结构参数有关。
3.3 系统饱和现象分析
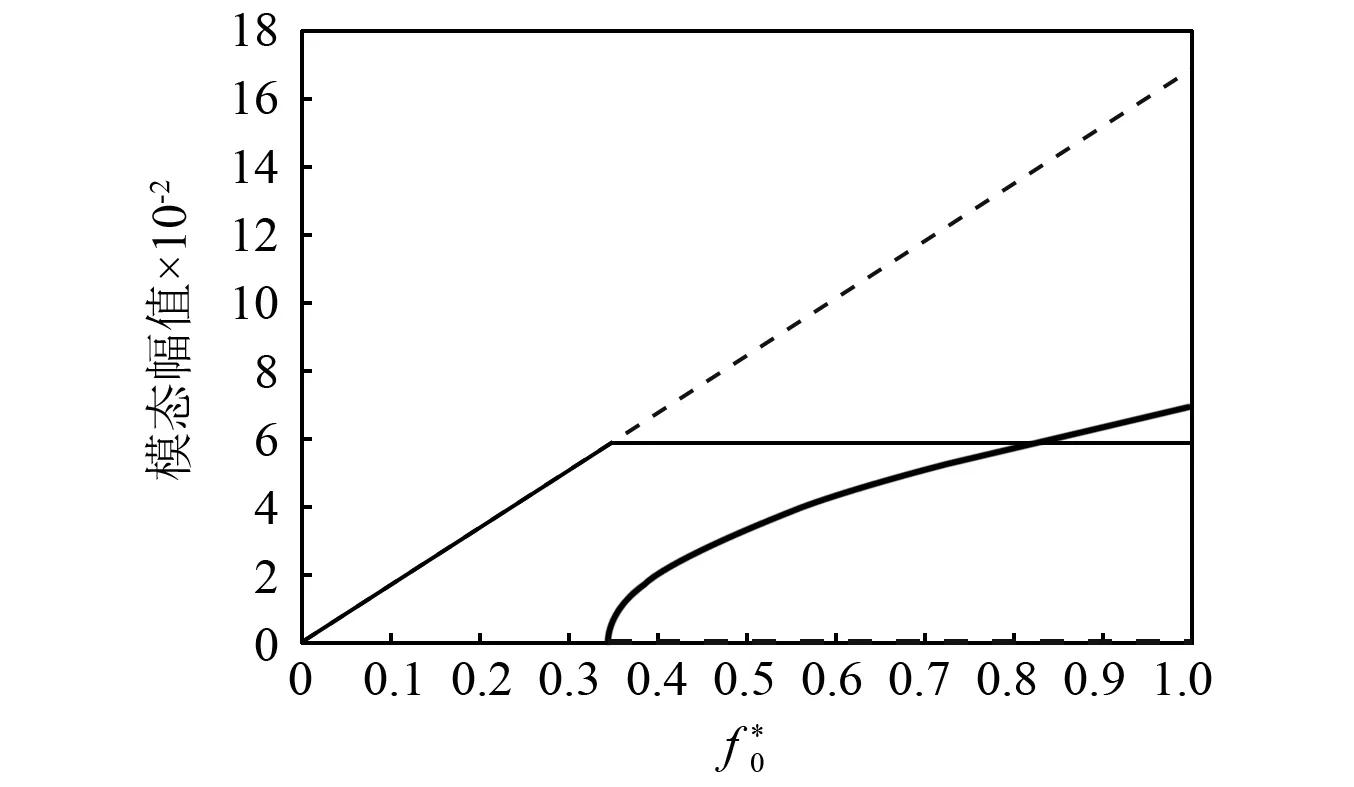
图2 外激励幅值对系统稳态响应的影响Fig.2 Influence of excitation amplitude on system steady state response

4 吸振器有效性的验证
4.1 无吸振器时的共振现象
计入柔性臂阻尼条件下,无吸振器时柔性机械臂的末端振动响应如图3所示。柔性机械臂受到持续小幅外共振激励时,末端振幅无法依靠柔性臂的自身小阻尼来衰减。证明了即使是小幅的持续外共振激励也会引起柔性机械臂的剧烈振动。
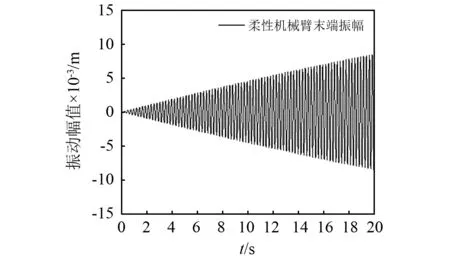
图3 无吸振器时柔性机械臂末端振动响应Fig.3 Vibration response at the end of the flexible manipulator without vibration absorber
4.2 内共振现象
由理论分析可知,当内共振完全调谐时(ε=0.05,σ1=0),柔性机械臂的一阶模态频率和吸振器的振动频率满足2∶1公度关系时,系统形成完全内共振。假设模态能量在交互过程中无衰减,即ζ1=0,ζ2=0。设定位置反馈增益kp=0.67和速度反馈增益kd=0。数值仿真得到慢时间域中柔性机械臂一阶模态与吸振器模态的模态响应曲线,其中粗实线表示柔性机械臂模态幅值a1的大小,虚线表示吸振器模态a2/10的大小,如图4所示。
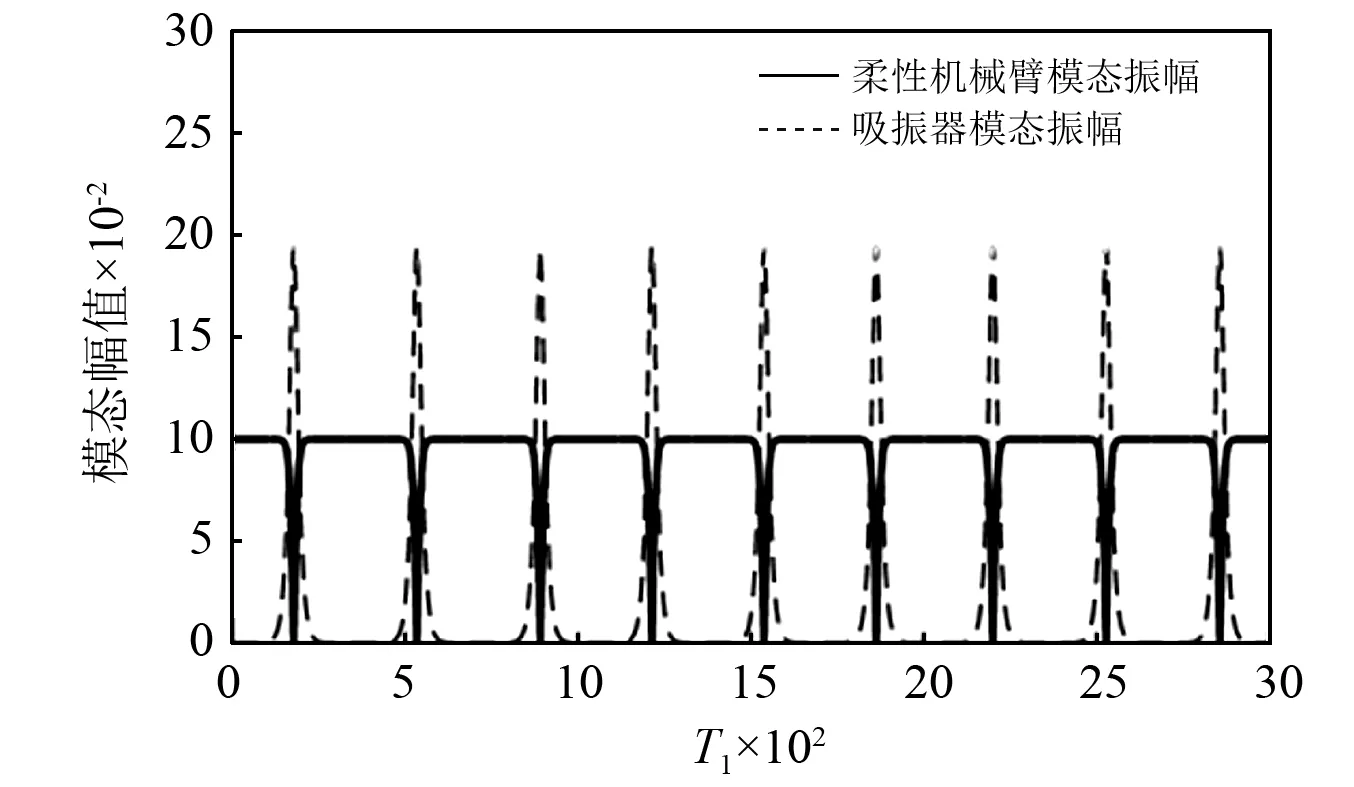
图4 柔性机械臂一阶模态和吸振器模态的模态响应曲线Fig.4 Modal response of first-order mode and vibration absorber mode of the flexible manipulator
4.3 吸振器的饱和控制
在柔性机械臂上添加吸振器,通过改变吸振器的频率,系统形成2∶1内共振。引入合适的吸振器参数,可以实现柔性机械臂系统的饱和控制,且柔性机械臂的模态幅值将达到饱和后不再增加。设定位置反馈增益kp=0.67,速度反馈增益kd=0.000 1,耦合反馈增益e1=0.01,数值仿真得到柔性机械臂末端振动响应如图5所示,吸振器刚性支杆转角如图6所示。柔性臂与吸振器均出现了饱和现象。
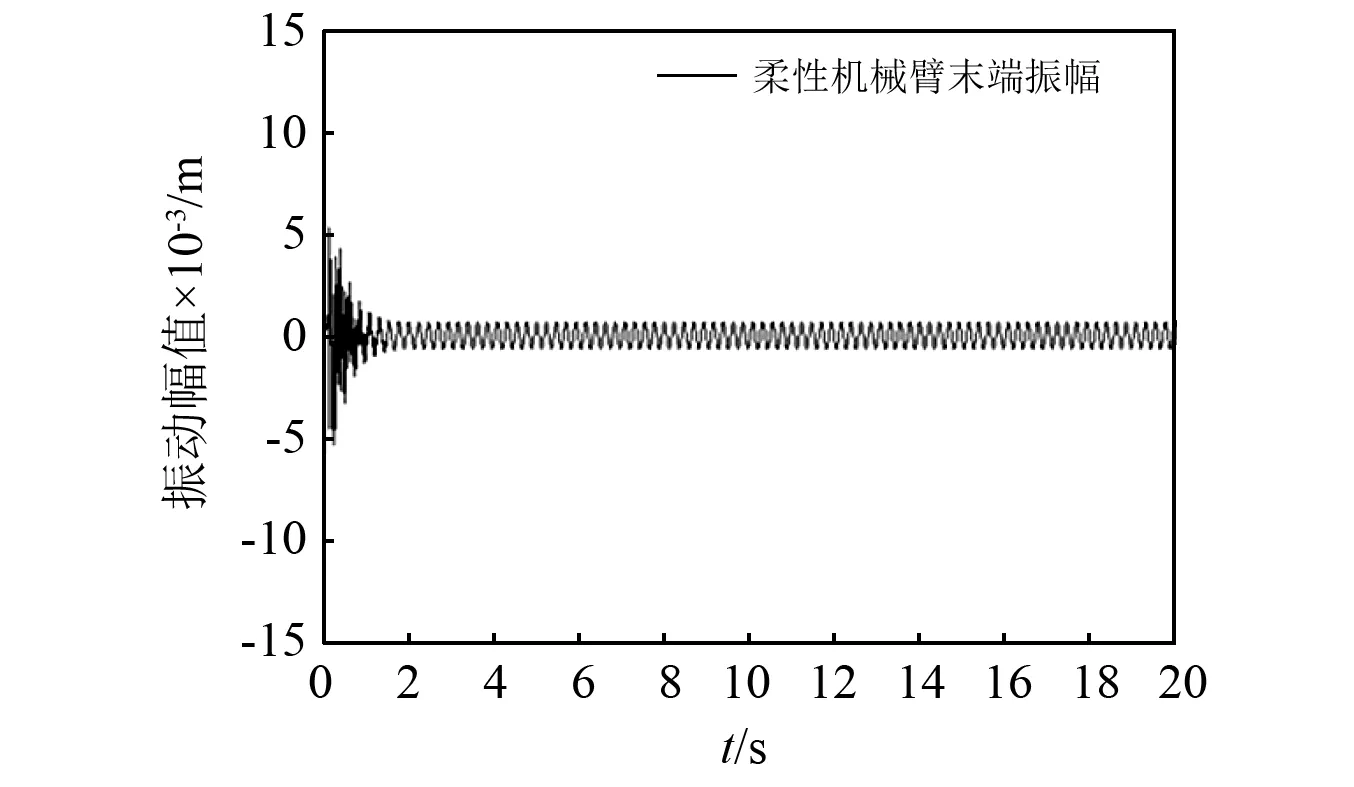
图5 柔性机械臂饱和控制时末端振动响应Fig.5 Vibration response at the end of the flexible manipulator under saturation control
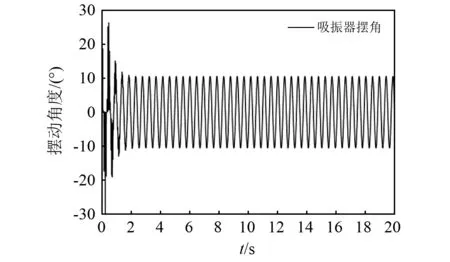
图6 柔性机械臂饱和控制时吸振器刚性支杆转角Fig.6 Vibration response of the vibration absorber rigid rod under saturation control
对比无吸振器和有吸振器时柔性机械臂的末端振动响应,如图7所示,图中实线为有吸振器时柔性机械臂的末端振动,图中虚线为无吸振器时柔性机械臂的末端振动。从图中可以看出与不进行振动控制相比,采用饱和控制的方法,柔性机械臂的末端振动幅值在2 s后达到饱和状态而不再增加,外激励能量传递到吸振器中,同时柔性机械臂的末端振动幅值相对无吸振器控制状态有大幅度降低。以上分析验证了饱和控制的有效性。
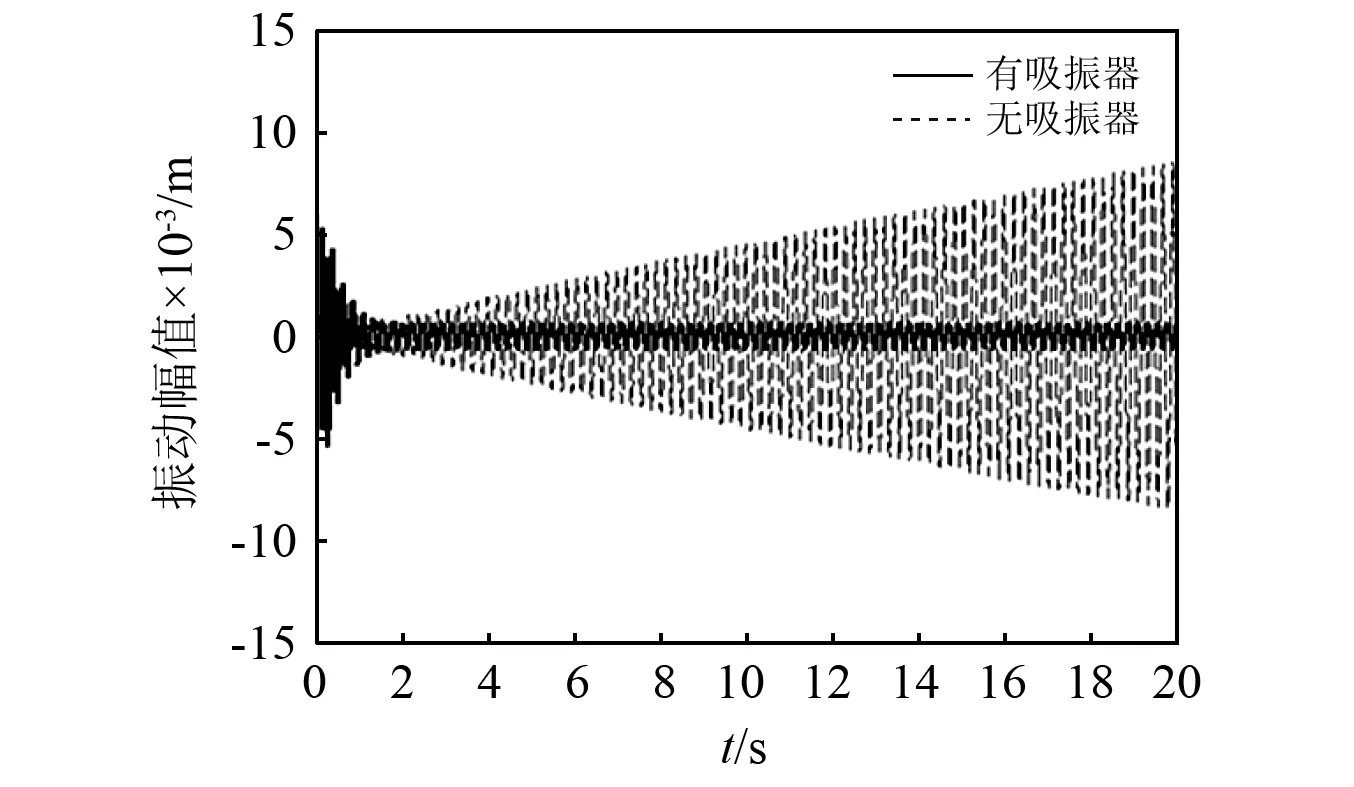
图7 无吸振器和饱和控制时柔性机械臂末端振动响应对比Fig.7 Comparison of vibration response at the end of flexible manipulator without absorber and under saturation control
5 结 论
本文以刚柔耦合的柔性机械臂为研究对象,构造了具有非线性耦合项的内共振吸振器,通过调节吸振器参数,可以使机械臂的一阶振动模态q1与吸振器振动模态φ形成2∶1内共振。
应用Kane方法建立了计入内共振吸振器的柔性机械臂在持续小幅外激励作用下的非线性动力学方程。
利用多尺度方法得到非线性动力学方程的近似稳态解;通过分析稳态解的存在形式,证明了系统具有饱和特性。
通过理论分析与数值仿真,得到如下结论:
(1)小幅的持续外共振激励会引起柔性机械臂的剧烈振动响应。
(2)柔性机械臂的一阶模态频率和吸振器的振动频率满足2∶1公度关系时,系统形成了内共振,在吸振器与柔性臂之间构建了有效的能量传输通道。
(3)在持续小幅的外共振激励作用下,相对于无吸振器状态,采用饱和控制可以使柔性机械臂末端振幅显著减小,证明了吸振器的有效性。
