星站差分用于远海航道疏浚施工实时水位控制的可行性分析
2019-12-30王瑞
王瑞
(中交华南勘察测绘科技有限公司,广东 广州 510220)
引言
在现阶段疏浚船舶所使用的智能化挖泥系统中,起到重要作用的就是水位改正,疏浚工程施工过程中对水位进行精准实时的获取十分关键,尤其在是当前中国一带一路的战略背景下,港口的建设向大型化、深水化发展,我国也加大了远距离深水航道建设的步伐,此点显得更为重要,实时与精确的水位控制可有效控制超挖、减少废方,对提升疏浚工程的质量起到重要作用。
1 现有水位控制方法
对海水面高度伴随时间变化的规律进行测量就是水位测量,目前可选择的技术方法主要有四种,水尺验潮、验潮井验潮、超声波验潮以及压力式验潮仪,以上水位测量方法所采取的方式均为定点测量,定点测量水位非常容易受到气候、河流、岸滩和海底地形等因素的影响,进而使观测得到的水位数据不能很好地代表整个施工区域的水位特点,无法将施工区的潮汐特征准确表达。对于远海超长航道疏浚工程的水位控制,目前比较成熟的解决方案有直接潮位观测,即在疏浚区域设立潮位站直接观测潮位;水位推算,通过潮位模型对施工船舶位置的天文潮位进行预报,结合已知站余水位对预报天文潮位进行订正;水位传递,即根据2个或2个以上有效距离控制内的已知站进行分带内插改正。
以上方法解决了水位获取的问题,而如何把获取的水位实时传输到施工船舶,指导船舶进行施工也是一个问题。随着施工区域的不断向外海延伸,信息传送的间距也在拉长,受限于通讯外部环境,现有的做法如通过高频、短信、无线电等进行水位传输的方式已不能满足远海航道疏浚施工的要求。后来出现的 RTK水位测量技术可以不受动态状态影响,获取的三维坐标达到厘米级,实时性方面性能较好,但是测量的作用距离也受无线数据传输的影响,一般情况下作用距离只能达到20 km;PPK潮位测量,与 RTK潮位测量原理相似,但采用的后处理技术,虽然作用距离不受数据传输的约束,但不能满足施工水位的实时需求。
综上所述,在远海航道疏浚施工中,由于离岸较远,现有的水位控制至少存在两个问题,一是获取的水位不能准确反映施工船舶所在位置的实际水位值,二是获取的水位值不能实时的传输到施工船舶。
2 星站差分GPS简介
星站差分GPS属于广域差分GPS范畴,目前应用比较广泛的星站差分系统有三种,分别是Navcom公司的Star Fire TM系统、Fugro公司的Omini STAR系统以及Subcea7公司的Veripos系统。
文中展开的论述是以“中国精度”作为代表,同时它也是我国第一个全球星基增强服务系统。“中国精度”系统的正式发布时间及提供全球范围服务的时间是2015年6月15日,该系统也标示我国在星基增强服务系统中第一次达到世界领先、全球覆盖。“中国精度”建设完成投入使用后,不需要进行基站架设,用户就能够在世界任何地方享受到由亚米级到分米级再到厘米级多种层级的高精度定位服务。在国外市场进行服务推广时,该系统名是“atlas”。

图1 中国精度系统架构
对于星基增强系统,是凭借全球建设的CORS站,经由信息通讯网络再到系统数据中心,计算出三类广域差分修正值,具体包括每一颗GNSS卫星的星历改正、钟差改正和电离层时间延迟改正等参数,再经由信息通信网络将上述差分信息传输到专用的通讯卫星,通讯卫星和地面之间数据传输的波段为L波段,地面客户端通过终端设备来接收差分信号,接收机的数据通过差分信号改正,在全球范围内实现米级、分米级、厘米级多层级的精准定位。
3 星站差分高程精度评定
星站差分高程精度评定分为静态高程精度评定和动态高程精度评定,实验所选的仪器是UniStrong G10A星站差分RTK系统,支持L-Band“中国精度”星站差分,无需架设基站,单机厘米级定位,“中国精度”定位高程精度10~15 cm。
3.1 静态高程精度分析
1)静态测试方案
静态高程精度分析在已知控制点进行实时单点定位测试,设置接收机为“中国精度”差分信号改正模式,待其固定解后,通过长时段的采集,将采集的高程数据求取平均值作为真值,计算已知控制点高程值与真值的较差,整理统计差值并深入分析,上述工作的目的是判别高程精度能否满足标称精度的要求。

图2 静态数据采集
2)实验观测数据分析
实验观测时,数据采集在已知控制点分两个时段进行,共计记录的点位信息数据18 552条,采样率为 1 s。对比已知值和观测值可知,最小差值是-0.058 m,最大差值是0.320 m,计算得到平均值为0.092 m,中误差0.069 m,观测高程平均值18.705 m,已知高程值18.613 m,误差0.092 m。

表1 已知值和观测值差值统计

图3 误差值分布
3.2 动态高程精度分析
1)动态测试方案
动态高程精度分析拟通过在测量船加装星站差分接收机,与PPK潮位测量系统的流动站进行同步采集数据,采集所用软件为自编GPStide软件,比对星站差分接收机采集的在航潮位数据与 PPK潮位测量经过后处理的在航潮位数据,对潮位曲线及差值进行分析统计,以评定高程精度是否能满足水位控制的要求。
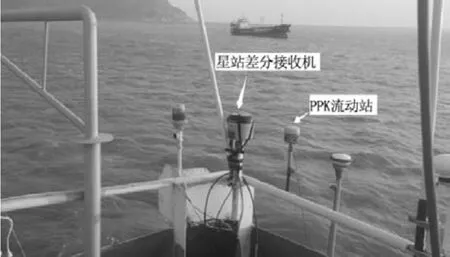
图4 动态测试数据采集
2)实验观测数据分析
总共分三天进行了三次外业采集,第一次比对时间为4月25日8:10—15:30,第二次比对时间为5月12日10:40—17:50,第三次比对时间为5月23日11:50—19:00,比对结果按照每10分钟一次分别形成星站差分观测潮位及 PPK后处理潮位。第一次观测星站差分潮位与PPK潮位比对最大差值22 cm,最小差值-2 cm,平均差值8 cm;第二次观测星站差分潮位与 PPK潮位比对最大差值21 cm,最小差值3 cm,平均差值10 cm;第三次观测星站差分潮位与PPK潮位比对最大差值18 cm,最小差值-5 cm,平均差值6 cm。具体观测及比对结果见图5~7。

图5 潮位比对曲线1

图6 潮位比对曲线2

图7 潮位比对曲线3
3.3 比对结果评定
根据以上实验观察结果,G10A星站差分通过长时间的静态观测,观测高程平均值与已知点高程相差9.2 cm,中误差6.9 cm,其中平均值与已知点高程误差在20 cm内的占90 %;静态观测的高程平均值与已知点高程的差值可理解为星站差分与PPK后处理的系统误差,本实验取-9 cm,故动态过程中通过星站差分观测潮位与 PPK后处理潮位的三次比对结果见表2、表3。

表2 星站差分潮位与PPK潮位动态比对

表3 改正后星站差分潮位与PPK潮位较差数量统计
实验数据比对结果可以表明,G10A星站差分接收机通过接收“中国精度”差分改正信号,不管是在静止状态测量或者动态测量过程中,其高程定位精度都非常高,完全满足标称的高程精度10~15 cm的要求。
4 结论
社会发展科技进步,差分GPS技术也在不断更新发展,笔者通过实验印证了近些年发展迅速的星站差分GPS技术所具有的高精度、实时、动态等优良特性,不用架设基准,在没有公网通讯信号的区域通过接收卫星差分信号即可获取高精度的位置信息,此优势弥补了目前远海航道疏浚施工中现有的水位控制所面临的远距离潮位数据传输及不能准确反映施工船舶所在位置的实际水位值的问题,这为使用星站差分 GPS进行远海航道疏浚施工实时水位控制奠定了基础。
疏浚项目依托于疏浚船舶,而如何将星站差分技术同现有疏浚船舶有效结合获取实时水位是笔者下一步探索的方向,比如如何解析星站差分GPS串口数据,如何结合船的吃水、GPS安装高度、船速等来测量水位,如何实现星站差分大地高基面向施工基面的转换等,这些问题都有待进一步探讨。
